ROS1结合自动驾驶数据集Kitti开发教程(五)发布IMU数据
注意:
- 再学习本系列教程时,应该已经安装过ROS了并且需要有一些ROS的基本知识
ubuntu版本:20.04
ros版本:noetic
课程回顾
ROS1结合自动驾驶数据集Kitti开发教程(一)Kitti资料介绍和可视化
ROS1结合自动驾驶数据集Kitti开发教程(二)发布图片
ROS1结合自动驾驶数据集Kitti开发教程(三)发布点云数据
ROS1结合自动驾驶数据集Kitti开发教程(四)画出自己车子模型以及照相机视野
前言
自动驾驶车辆必备数据IMU将会在这章教程中发布出来。
1.数据分析
在之前的教程中分别使用到了相机图片数据和激光雷达点云数据,他们都是使用不同的文件进行数据封装的。这次的IMU数据是在oxts文件夹下,每一帧的数据都存放在.txt文件中,每一个文件中装有30种类型的数据,详见kitti_doc
- lat: latitude of the oxts-unit (deg)
- lon: longitude of the oxts-unit (deg)
- alt: altitude of the oxts-unit (m)
- roll: roll angle (rad), 0 = level, positive = left side up (-pi..pi)
- pitch: pitch angle (rad), 0 = level, positive = front down (-pi/2..pi/2)
- yaw: heading (rad), 0 = east, positive = counter clockwise (-pi..pi)
- vn: velocity towards north (m/s)
- ve: velocity towards east (m/s)
- vf: forward velocity, i.e. parallel to earth-surface (m/s)
- vl: leftward velocity, i.e. parallel to earth-surface (m/s)
- vu: upward velocity, i.e. perpendicular to earth-surface (m/s)
- ax: acceleration in x, i.e. in direction of vehicle front (m/s^2)
- ay: acceleration in y, i.e. in direction of vehicle left (m/s^2)
- az: acceleration in z, i.e. in direction of vehicle top (m/s^2)
- af: forward acceleration (m/s^2)
- al: leftward acceleration (m/s^2)
- au: upward acceleration (m/s^2)
- wx: angular rate around x (rad/s)
- wy: angular rate around y (rad/s)
- wz: angular rate around z (rad/s)
- wf: angular rate around forward axis (rad/s)
- wl: angular rate around leftward axis (rad/s)
- wu: angular rate around upward axis (rad/s)
- posacc: velocity accuracy (north/east in m)
- velacc: velocity accuracy (north/east in m/s)
- navstat: navigation status
- numsats: number of satellites tracked by primary GPS receiver
- posmode: position mode of primary GPS receiver
- velmode: velocity mode of primary GPS receiver
- orimode: orientation mode of primary GPS receiver
2.发布IMU数据
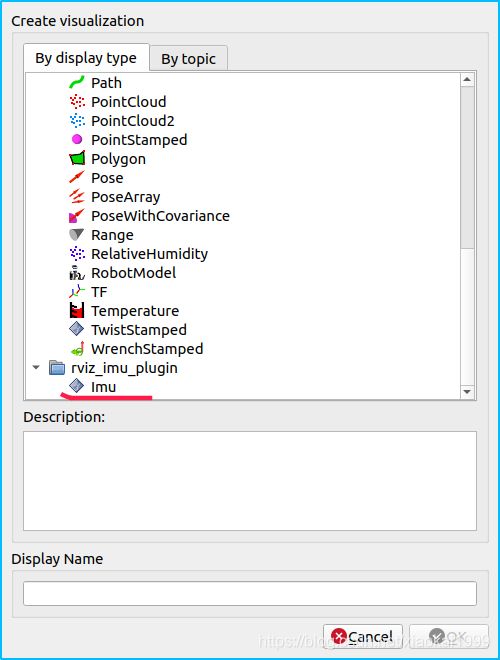
2.1IMU插件
rviz_imu_plugin
首先确保已经安装了Rviz的imu插件,使用如下命令查看并安装:
$ sudo apt install ros-noetic-rviz-imu-plugin
安装完成后可以再rviz->add窗口内看到imu插件。
2.2源码
# 给每一帧的数据集的每列加上列名
IMU_NAME = ["lat", "lon", "alt", "roll", "pitch", "yaw", "vn", "ve", "vf", "vl", "vu", "ax", "ay", "az", "af", "al", "au", "wx", "wy", "wz", "wf", "wl", "wu", "posacc", "velacc", "navstat", "numsats", "posmode", "velmode", "orimode"]
def publish_imu(num,imu_pub):
# 使用pandas数据处理模块载入txt文件
imu_data = pd.read_csv(os.path.join(BASE_PATH, "oxts/data/%010d.txt"%num), header=None, sep=" ")
imu_data.columns = IMU_NAME
imu = Imu()
imu.header.frame_id = "map"
imu.header.stamp = rospy.Time.now()
# 从imu获取四元数
q = transformations.quaternion_from_euler(float(imu_data.roll), float(imu_data.pitch), float(imu_data.yaw))
imu.orientation.x = q[0]
imu.orientation.y = q[1]
imu.orientation.z = q[2]
imu.orientation.w = q[3]
# 线速度
imu.linear_acceleration.x = imu_data.af
imu.linear_acceleration.y = imu_data.al
imu.linear_acceleration.z = imu_data.au
# 角速度
imu.angular_velocity.x = imu_data.wx
imu.angular_velocity.y = imu_data.wy
imu.angular_velocity.z = imu_data.wz
imu_pub.publish(imu)
3.效果
在Rviz中加上IMU数据节点,如下所示配置:

最后的效果如下所示:
结语
本文也是基于笔者的学习和使用经验总结的,主观性较强,如果有哪些不对的地方或者不明白的地方,欢迎评论区留言交流~
为了能和读者进一步讨论问题,建立了一个微信群,方便给大家解答问题,也可以一起讨论问题。
加群链接
✌Bye