主编推荐 | 模糊时间的柔性车间调度问题 Python 实现遗传算法求解
1 问题描述
模糊性和灵活性的概念普遍存在于实际制造系统中,因为机器通常具有多种功能,并且无法提前精确地知道处理时间。因此,研究具有模糊处理时间的柔性调度问题对于实际应用非常重要。
FJSPF(the FJSP with Fuzzy Processing time)可以表述如下:有n个工件要在m台机器上加工。每个工件有ni个工序,每个工件必须按确定的路径完成所有工序,每道工序有1台及以上加工工序,工序的加工时间为模糊时间。当工序加工时间为模糊时间时,要想能很好的排产出来,比如在甘特图上排产,需要一些模糊数运算操作。这些运算包括加法运算、两个模糊数的最大运算和模糊数的排序方法。加法运算用于计算运算的模糊完成时间。最大操作用于定义操作。另一种方法是比较最大模糊完成时间。对于两个三角模糊数(Triangle fuzzy numbers)![]() 和
和![]() 加法操作
加法操作
![]()
取大操作:为了衡量三角模糊数的大小关系,Sakawa等[1]提出判定方法,此后又有许多学者重新进行了定义,本文采用Lei[2] 提出的判别规则,令![]() ,由此可得:
,由此可得:
(1)若![]() ,则
,则![]()
(2)若![]() ,则比较
,则比较  和
和  ,若
,若![]() ,则
,则![]()
(3)若![]() ,且
,且![]() ,若
,若![]() ,则
,则![]()
2 编码解码
算例如下[3]:

编码:编码采用OSMS编码

解码:
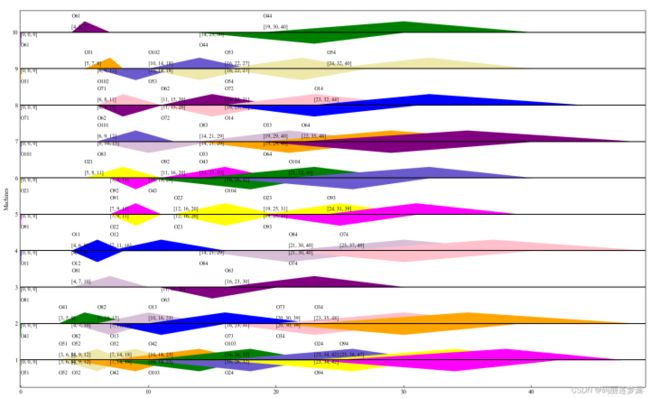
解码前,首先对三角模糊Gantt图进行说明,我们都知道,Gantt图是对各工序在每个机器上加工的开始结束时间进行可视化表述,同理三角模糊Gantt图也是如此,同一横线上的表示一个机器上的工序,横线下方为工序的模糊开始时间,横线上方为工序的模糊结束时间。
普通解码:从左到右读取OS、MS编码,不考虑插入,直接解码

贪婪解码:考虑工序前插(这跟普通FJSP问题差不多,唯一的区别在于,这里的工序时间是模糊时间)
上诉普通解码的考虑前插后变为:

适应度值为模糊完工时间的三角模糊数:
![]()
3 算法
上面给出的文献【2】中提供了4个算例。(单目标),我也对算例进行了整理,需要的可前往此处获取:Aihong-Sun/Fuzzy_time_FJSP_Instance: Instance from (github.com) 文献[3]中提供了以完工时间、加工成本、设备负载平衡和加工能耗为目标的多目标算例:
Fuzzy_time_FJSP_Instance/base_instance.py at main · Aihong-
Sun/Fuzzy_time_FJSP_Instance (github.com)
使用普通GA+精英保留策略(种群个数:100,迭代次数:100,交叉率:0.8,变异率:0.05,Elite个数:10)对算例进行了测试. 注:本文的交叉变异设置较为随意且未加任意局部搜索等,效果有差距属于正常。
3.1 文献【2】中算例验证
文献2中对自己生成的算例的测试结果如下:

本文用普通GA的测试10次得到的效果如下 :

4 部分代码展示
from Flexible_Job_Shop.Job import Job
from Flexible_Job_Shop.Machine import Machine
from Fuzzy_Shop_Floor.Fuzzy_time_operator import *
class Job_fuzzy(Job):
def __init__(self,idx,processing_machine,processing_time):
super(Job_fuzzy, self).__init__(idx,processing_machine,processing_time)
self.end=[0,0,0]
class Machine_fuzzy(Machine):
def __init__(self, idx):
super(Machine_fuzzy, self).__init__(idx)
def update(self,s,e,Job):
self.start.append(s)
self.start.sort(key=lambda u:u[1])
self.end.append(e)
self.end.sort(key=lambda u:u[1])
idx=self.start.index(s)
self._on.insert(idx,Job)
def find_start(self,s,o_pt):
if self.end==[]: return s
else:
if Measure(s,self.end[-1]):return s
else:
o_s=self.end[-1]
l = len(self.end) - 2
while l>=0:
if Measure(add(s,o_pt),self.start[l+1]):
break
if Measure(self.end[l],s) and Measure(self.start[l+1],add(self.end[l],o_pt)):
o_s=self.end[l]
elif Measure(s,self.end[l]) and Measure(self.start[l+1],add(s,o_pt)):
o_s=s
l-=1
return o_sfrom Fuzzy_Shop_Floor.fuzzy_SF_Item import Job_fuzzy as Job
from Fuzzy_Shop_Floor.fuzzy_SF_Item import Machine_fuzzy as Machine
from Fuzzy_Shop_Floor.Fuzzy_time_operator import *
class Job_shop:
def __init__(self,args):
self.n= args.n
self.m=args.m
self.O_num=args.O_num
self.PM = args.Processing_Machine
self.PT = args.Processing_Time
def reset(self):
self.C_end=[0,0,0]
self.C_max = 0
self.Jobs=[]
for i in range(self.n):
Ji=Job(i,self.PM[i],self.PT[i])
self.Jobs.append(Ji)
self.Machines=[]
for j in range(self.m):
Mi=Machine(j)
self.Machines.append(Mi)
#Xu,,Ye,Wang,,Ling,Wang,,Sheng-yao,Liu,,& Min.(2015).An effective teaching-learning-based optimization algorithm
# for the flexible job-shop scheduling problem with fuzzy processing time.NEUROCOMPUTING,148,260-268.
def decode(self,Job,Machine):
Ji=self.Jobs[Job]
o_pt, s,M_idx = Ji.get_next_info(Machine)
Mi=self.Machines[M_idx-1]
start=Mi.find_start(s,o_pt)
end=add(start,o_pt)
Ji.update(end)
Mi.update(start,end,[Ji.idx,Ji.cur_op])
if Measure(end,self.C_end):
self.C_end=end
self.C_max=TFN_value(end)def add(X,Y):
return [X[_]+Y[_] for _ in range(3)]
def TFN_value(X):
return (X[0] + 2 * X[1] + X[2]) / 4
def Measure(X,Y):
F_X=TFN_value(X)
F_Y=TFN_value(Y)
if F_X!=F_Y:
if F_X>F_Y:return True
else:return False
else:
if X[1]!=Y[1]:
if X[1]>Y[1]:return True
else:return False
else:
if X[2]-X[0]>Y[2]-Y[0]:return True
else:return False参考文献:
[1]Sakawa M, Kubota R. Fuzzy programming for multiobjective job shop scheduling with fuzzy processing time and fuzzy duedate through genetic algorithms[J]. European Journal of Operational Research, 2000, 120(2): 393-407.
[2]Lei D M. A genetic algorithm for flexible job shop scheduling with fuzzy processing time[J]. International Journal of Production Research, 2010, 48(10): 2995-3013.
[3]Xu,,Ye,Wang,,Ling,Wang,,Sheng-yao,Liu,,& Min.(2015).An effective teaching-learning-based optimization algorithmfor the flexible job-shop scheduling problem with fuzzy processing time.NEUROCOMPUTING,148,260-268.
[4]郭钧,钟精诚,杜百岗等.考虑模糊作业时间的再制造加工车间多目标调度方法[J].控制与决策,2020,35(6):1497-1504.
可以在 本公众号后台 回复关键词:“柔性车间调度 ” 获取本文完整代码,如果觉得有用, 请勿吝啬你的留言和赞哦!