卡尔曼滤波估计小车匀加速运动
本文主要内容借鉴http://blog.csdn.net/heyijia0327/article/details/17487467博客当中的内容。
有一个匀加速运动的小车,它受到的合力为 ft , 由匀加速运动的位移和速度公式,能得到由 t-1 到 t 时刻的位移和速度变化公式:

该系统系统的状态向量包括位移和速度,分别用 xt 和 xt的导数 表示。控制输入变量为u,也就是加速度,于是有如下形式:


所以这个系统的状态的方程为:

这里对应的的矩阵A大小为 2*2 ,矩阵B大小为 2*1。
貌似有了这个模型就能完全估计系统状态了,速度能计算出,位移也能计算出。那还要卡尔曼干嘛,问题是很多实际系统复杂到根本就建不了模。并且,即使你建立了较为准确的模型,只要你在某一步有误差,由递推公式,很可能不断将你的误差放大A倍(A就是那个状态转换矩阵),以至于最后得到的估计结果完全不能用了。回到最开始的那个笑话,如果那个完全凭预测的特种兵在某一步偏离了正确的路径,当他站在错误的路径上(而他自己以为是正确的)做下一步预测时,肯定走的路径也会错了,到最后越走越偏。
既然如此,我们就引进反馈。从概率论贝叶斯模型的观点来看前面预测的结果就是先验,测量出的结果就是后验。
测量值当然是由系统状态变量映射出来的,方程形式如下:

注意Z是测量值,大小为m*1(不是n*1,也不是1*1,后面将说明),H也是状态变量到测量的转换矩阵。大小为m*n。随机变量v是测量噪声。
同时对于匀加速模型,假设下车是匀加速远离我们,我们站在原点用超声波仪器测量小车离我们的距离。
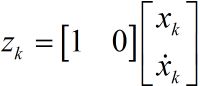
也就是测量值直接等于位移。可能又会问,为什么不直接用测量值呢?测量值噪声太大了,根本不能直接用它来进行计算。试想一个本来是朝着一个方向做匀加速运动的小车,你测出来的位移确是前后移动(噪声影响),只根据测量的结果,你就以为车子一会往前开一会往后开。
对于状态方程中的系统噪声w和测量噪声v,假设服从如下多元高斯分布,并且w,v是相互独立的。其中Q,R为噪声变量的协方差矩阵。
看到这里自然要提个问题,为什么噪声模型就得服从高斯分布呢?请继续往下看。
对于小车匀加速运动的的模型,假设系统的噪声向量只存在速度分量上,且速度噪声的方差是一个常量0.01,位移分量上的系统噪声为0。测量值只有位移,它的协方差矩阵大小是1*1,就是测量噪声的方差本身。
那么:

Q中,叠加在速度上系统噪声方差为0.01,位移上的为0,它们间协方差为0,即噪声间没有关联。
使用卡尔曼滤波器估计小车匀加速运动的
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%日 期: 2015.10.12
%程序功能: 使用卡尔曼滤波器估计小车匀加速运动
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear all
% 初始化参数
delta_t=0.1; %采样时间
t=0:delta_t:5;
N = length(t); % 序列的长度
sz = [2,N]; % 信号需开辟的内存空间大小 2行*N列 2:为状态向量的维数n
g=10; %加速度值
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
x=1/2*g*t.^2; %实际真实位置
z = x + sqrt(10).*randn(1,N); % 测量时加入测量白噪声
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Q =[0 0;0 9e-1]; %假设建立的模型 噪声方差叠加在速度上 大小为n*n方阵 n=状态向量的维数
R = 10; % 位置测量方差估计,可以改变它来看不同效果 m*m m=z(i)的维数
A=[1 delta_t;0 1]; % n*n
B=[1/2*delta_t^2;delta_t];
H=[1,0]; % m*n
n=size(Q); %n为一个1*2的向量 Q为方阵
m=size(R);
% 分配空间
xhat=zeros(sz); % x的后验估计
P=zeros(n); % 后验方差估计 n*n
xhatminus=zeros(sz); % x的先验估计
Pminus=zeros(n); % n*n
K=zeros(n(1),m(1)); % Kalman增益 n*m
I=eye(n);
% 估计的初始值都为默认的0,即P=[0 0;0 0],xhat=0
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%EKF过程
for k = 9:N %假设车子已经运动9个delta_T了,我们才开始估计
% 时间更新过程
xhatminus(:,k) = A*xhat(:,k-1)+B*g;
Pminus= A*P*A'+Q;
% 测量更新过程
K = Pminus*H'*inv( H*Pminus*H'+R );
xhat(:,k) = xhatminus(:,k)+K*(z(k)-H*xhatminus(:,k));
P = (I-K*H)*Pminus;
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
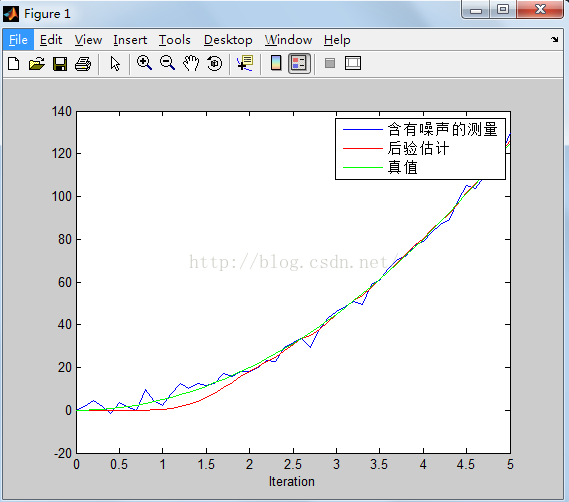
figure(1)
plot(t,z);
hold on
plot(t,xhat(1,:),'r-')
plot(t,x(1,:),'g-');
legend('含有噪声的测量', '后验估计', '真值');
xlabel('Iteration');
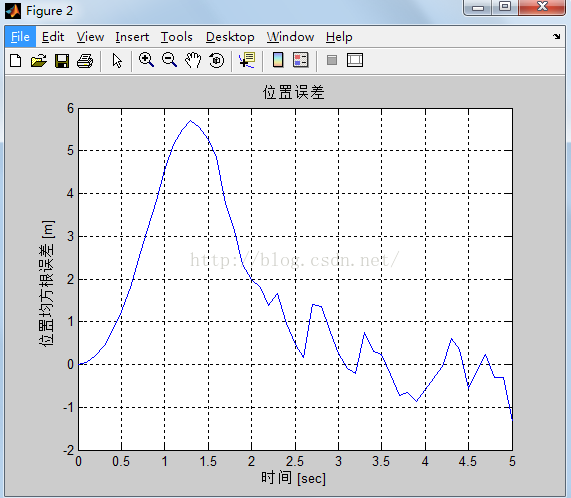
%% Estimate error(估计误差)
x_error = x-xhat(1,:);
%% Graph 2
figure(2)
plot(t,x_error(1,:)),grid on;
title('位置误差')
xlabel('时间 [sec]')
ylabel('位置均方根误差 [m]')
hold off;
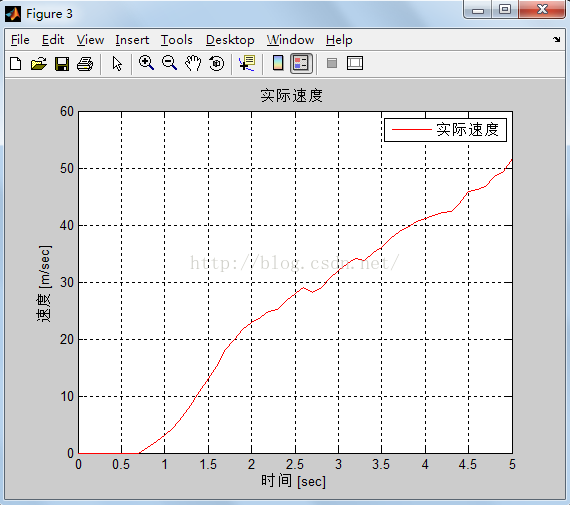
%% Graph 3
figure(3)
plot(t,xhat(2,:),'r'),grid on;
title('实际速度 ')
legend('实际速度')
xlabel('时间 [sec]')
ylabel('速度 [m/sec]')
hold off;
%==========================================================================