ECCV2018:DaSiamRPN目标跟踪代码运行及解读
DaSiamRPN主要是在SiamRPN的基础上做了改进。SiamRPN引入RPN使得跟踪能得到相当精确的包围框,但并没有提高分类器的鉴别能力,而DaSiamRPN在前者的基础上,对训练方式做出了改进,提高了网络的鉴别能力。
由于电脑没有GPU,只能修改成CPU版本进行运行。
代码地址:https://github.com/foolwood/DaSiamRPN
一、环境配置
打开Anaconda Prompt,创建虚拟环境conda create -n DaSiamRPN python=3.5
激活虚拟环境conda activate DaSiamRPN
安装torch[下载地址][官网],作者github上给的是python2.7,torch0.3.1但是由于window没有这个版本的torch,所以我这里用的是torch0.4.0 pip install torch-0.4.0-cp35-cp35m-win_amd64.whl
安装pip install numpy
安装opencv pip install opencv-python
测试,输入python
>>> import torch
>>> import cv2
>>> import numpy
>>> exit()

说明库安装成功
二、代码运行
具体流程可以参考视频:https://www.bilibili.com/video/BV1kx411o7Nv/
将下载SiamRPNBIG放在’./code’
修改代码
2.1. demo.py

2.2 run_SiamRPN.py

![]()
之后运行Demo.py,即可运行

但是可能是因为troch的版本问题,效果不理想,很简单的视频都会莫名跟丢
三、代码解读
虽然下的是DaSiamRPN的代码,但感觉就是SiamRPN,没看到DaSiamRPN的更新策略、重检测。
3.1 SiamRPN_init
def SiamRPN_init(im, target_pos, target_sz, net):
state = dict()
p = TrackerConfig()
p.update(net.cfg)
state['im_h'] = im.shape[0]
state['im_w'] = im.shape[1]
if p.adaptive:
if ((target_sz[0] * target_sz[1]) / float(state['im_h'] * state['im_w'])) < 0.004:
p.instance_size = 287 # small object big search region
else:
p.instance_size = 271
#响应图尺寸19*19
p.score_size = (p.instance_size - p.exemplar_size) / p.total_stride + 1
#生成响应图每个位置(19*19)节点,每个节点5个anchors
p.anchor = generate_anchor(p.total_stride, p.scales, p.ratios, int(p.score_size))
avg_chans = np.mean(im, axis=(0, 1))
wc_z = target_sz[0] + p.context_amount * sum(target_sz)
hc_z = target_sz[1] + p.context_amount * sum(target_sz)
s_z = round(np.sqrt(wc_z * hc_z))
# initialize the exemplar
z_crop = get_subwindow_tracking(im, target_pos, p.exemplar_size, s_z, avg_chans)
z = Variable(z_crop.unsqueeze(0))
net.temple(z)
#net.temple(z.cuda())
if p.windowing == 'cosine':
window = np.outer(np.hanning(p.score_size), np.hanning(p.score_size))
elif p.windowing == 'uniform':
window = np.ones((p.score_size, p.score_size))
window = np.tile(window.flatten(), p.anchor_num)
state['p'] = p
state['net'] = net
state['avg_chans'] = avg_chans
state['window'] = window
state['target_pos'] = target_pos
state['target_sz'] = target_sz
return state
3.2 tracker_eval
def tracker_eval(net, x_crop, target_pos, target_sz, window, scale_z, p):
delta, score = net(x_crop)
delta = delta.permute(1, 2, 3, 0).contiguous().view(4, -1).data.cpu().numpy()
score = F.softmax(score.permute(1, 2, 3, 0).contiguous().view(2, -1), dim=0).data[1, :].cpu().numpy()
delta[0, :] = delta[0, :] * p.anchor[:, 2] + p.anchor[:, 0] # x,尺寸为5*19*19
delta[1, :] = delta[1, :] * p.anchor[:, 3] + p.anchor[:, 1] # y
delta[2, :] = np.exp(delta[2, :]) * p.anchor[:, 2] # w
delta[3, :] = np.exp(delta[3, :]) * p.anchor[:, 3] # h
总共K个anchors(K=5)
delta用于存储x,y,w,h(尺寸为4K);score用于保存分值(foreground and background,尺寸为2K)
K个anchors对应的论文(SiamRPN)计算公式
# size penalty
s_c = change(sz(delta[2, :], delta[3, :]) / (sz_wh(target_sz))) # scale penalty 对角线尺寸
r_c = change((target_sz[0] / target_sz[1]) / (delta[2, :] / delta[3, :])) # ratio penalty w/h
penalty = np.exp(-(r_c * s_c - 1.) * p.penalty_k)
pscore = penalty * score
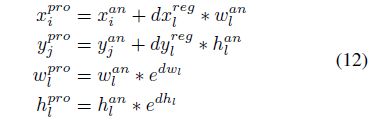
对应论文(SiamRPN)
![]()
# window float
pscore = pscore * (1 - p.window_influence) + window * p.window_influence # window是余弦窗;p.window_influence=0.42
best_pscore_id = np.argmax(pscore)
target = delta[:, best_pscore_id] / scale_z #得到x_pro,y_pro,w_pro,h_pro四个变量在图片上的变化量(单位是像素)
target_sz = target_sz / scale_z
lr = penalty[best_pscore_id] * score[best_pscore_id] * p.lr
#目标的xy位置是直接加上x_pro和y_pro,而wh是有一个学习率来增量学习的(目标相邻两帧之间的纵横比不会突变的很厉害)
res_x = target[0] + target_pos[0]
res_y = target[1] + target_pos[1]
res_w = target_sz[0] * (1 - lr) + target[2] * lr
res_h = target_sz[1] * (1 - lr) + target[3] * lr
target_pos = np.array([res_x, res_y])
target_sz = np.array([res_w, res_h])
return target_pos, target_sz, score[best_pscore_id]
四、Linux16.04+python2.7环境配置
由于作者github上给的是python2.7+torch0.3.1,所以想尝试一下Linux底下的torch0.3.1的跟踪效果:
由于oython版本低,opencv不好装,只好装了3.1.0版本的
安装Opencv:pip2 install --target='Your Opencv Insatll Path' opencv-python==3.1.0.0
添加环境变量:export PYTHONPATH=$PYTHONPATH:Your Opencv Insatll Path

由于Linux不好显示图像,我就将跟踪结果保存成视频,demo.py修改成如下:
# tracking and visualization
fps = 30
fourcc = cv2.VideoWriter_fourcc(*'MJPG')
videoWriter = cv2.VideoWriter('saveVideo.avi',fourcc,fps,(480,360))#480,360对应图像的尺寸,这里是bag视频的尺寸,如果尺寸不确定,在保存视频前+resize
toc = 0
for f, image_file in enumerate(image_files):
im = cv2.imread(image_file)
tic = cv2.getTickCount()
state = SiamRPN_track(state, im) # track
toc += cv2.getTickCount()-tic
res = cxy_wh_2_rect(state['target_pos'], state['target_sz'])
res = [int(l) for l in res]
cv2.rectangle(im, (res[0], res[1]), (res[0] + res[2], res[1] + res[3]), (0, 255, 255), 3)
videoWriter.write(im)
# cv2.imshow('SiamRPN', im)
# cv2.waitKey(1)
跟踪效果如下:
