(DenseNet)Densely Connected Convolutional Networks--Gao Huang
- 0、摘要
- 1、引言
- 2、相关工作(略)
- 3、DenseNets和特性介绍
- 4、实验
- 5、一些解释或者结论
- 6、结论
通过全短接实现特征重用和特征数的累计(保证每层产生少量特征数,后面也会concat很多特征,因为叠加了),同时这种全短接可能也加快了损失函数的梯度回传,缓解梯度消失。在DenseBlock内部通过1x1卷积瓶颈降低计算量,在DenseBlock之间的转换层通过“压缩”参数控制输入到下一个DenseBlock的特征数,也能够控制计算量。
所以总上通过特征重用在保证特征数量时,通过瓶颈和压缩降低计算量和参数量,通过实验在相同精度效果下,比其他模型参数量都更小。
但是一个问题是,因为后面的特征要用到前面的特征,所以前面的特征会一直被保存在内存中,所以占用内存是很大的。这也是为什么虽然比ResNet效果好,却不如ResNet流行。(没有实验过是不是内存杀手,这是网上的结论)
0、摘要
最近研究表明,如果CNN在靠近输入和输出的层直接包含更短的连接,可以更深更准确更有效连接。
于是我们设计了本文的DenseNet,它将每层与每层都连接起来,对于有L层的网络,传统CNN有L条连接(包括后续一个连接),但是DenseNet有 L ( L + 1 ) 2 \frac{L(L+1)}{2} 2L(L+1)条连接。
DenseNet有几个优点:
- 缓解了梯度消失问题
- 加强了特征传播
- 鼓励特征重用
- 大大减少参数量
同时公布了代码和预训练模型:https://github.com/liuzhang13/DenseNet
1、引言
CNN的一个问题是:当输入或梯度信息经过多层达到末端后,可能会“消失”。像 Highway Networks和ResNet都通过短接将信号传递到下一层,还有很多其他形式的网路,但是都有一个关键点:都有从前端层到末端层的短接路径
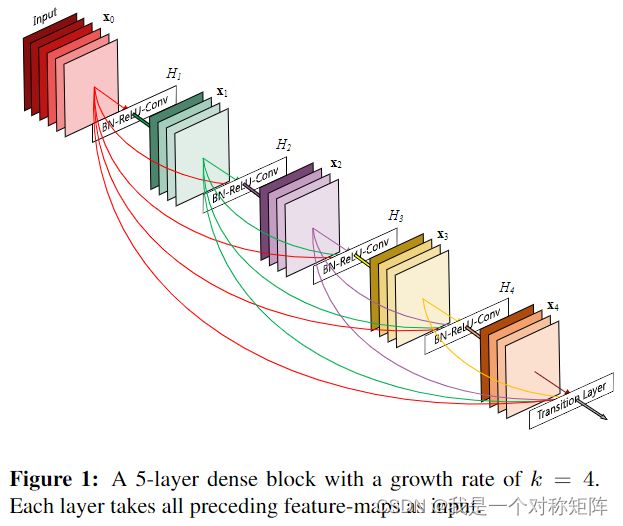
DenseNet结构如图1所示,与ResNet使用sum对短接整合不同,DenseNet使用concat整合多路特征。
可能一眼看过去觉得DenseNet结构很重,实际上它比普通CNN网络需要更少的参数,因为不需要重新学习冗余的特征映射(个人理解为如果这层需要以前的特征信息,可以直接通过短接拿到。如果是普通CNN则因与前面没有连接所以需要重新学习)。
除此之外,DenseNet的另一大优势是改进了信息流和梯度,每一层都可以直接访问损失函数和初始输入的梯度,这有助于对更深层次的网络体系结构进行培训。
此外作者还观察到稠密链接具有正则化效应,可以减少训练集规模较小的任务的过拟合风险。
2、相关工作(略)
略
3、DenseNets和特性介绍
现在假设有输入图像 x 0 x_0 x0,网络有 L L L层,每层实现非线性变换 H l ( ⋅ ) H_l(·) Hl(⋅), l l l表示第几层。这里的 H ( ⋅ ) H(·) H(⋅)可以是操作的复合函数,也就是可以包含BN层、ReLU、Pooling或者Conv等操作。我们将第 l l l层的输出表示为 X i X_i Xi
ResNets可以表示为: X i = H i ( X l − 1 ) + X l − 1 X_i=H_i(X_{l-1})+X_{l-1} Xi=Hi(Xl−1)+Xl−1
Dense连接可以表示为: X l = H l ( [ X 0 , X 1 , . . . , X l − 1 ] ) X_l=H_l([X_0, X_1,...,X_{l-1}]) Xl=Hl([X0,X1,...,Xl−1])
这里的[ ]表示concat聚合,由于密集的连通性,我们将这种网络结构称为DenseNet
Composite function:为了方便,我们将 H l ( ⋅ ) H_l(·) Hl(⋅)定义为三个连续操作的符合函数:BN+ReLU+Conv
Pooling layers:考虑到特征图在各层的尺寸不同,不能直接concat。如果直接横跨整个也确实不方便,所以将DenseNet划分为多个dense blocks,而块直接的称为转换层,用于卷积和池化,在本文中转换层=BN+1x1Conv+2x2AveragePooling

Growth rate(增长率):K:如果每个 H ( ⋅ ) H(·) H(⋅)块都生成K个特征通道(不管输入是多少通道,输出都是K通道),则第L层有 K 0 + K ∗ ( L − 1 ) K_0+K*(L-1) K0+K∗(L−1)个输入特征通道,其中 K 0 K_0 K0是输出层的通道数
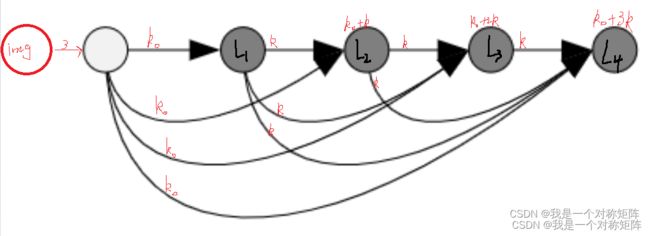
可以发现,实际上每个块的输出通道都是固定为k的,但是输出通道却在不断变多,因为Dense连接的缘故。
可以遇见的是每个块的卷积的个数都可以固定为k(Pytorch:Conv2d(output=k)),而不用像其他网络指定卷积核的个数为128、256、512、1024等特别多,这也是为什么DenseNet实际上参数量很少的缘故,在有限卷积个数通过特征重用也能够有大量的特征数。
在本文中增长率K比较小,但是也有很强的表现,对此的一种解释为每层都可以访问所有前面的特征图,类似网络的全局知识,每个层都将自己产出的K个特征添加到这个全局知识,增长率控制着每一层为全局知识贡献多少信息。一旦全局知识被写入则网络的任何地方都可以访问,与传统网络架构不同,不需要在层层之间复制这种知识(类似不需要你搬运前面的特征,我直接把路给你修好自己去找)。
瓶颈层
尽管每个层( H ( ⋅ ) H(·) H(⋅))都只能产生K个输出特征,但是因为累计原因输入特征却有很多。可以在3x3卷积前使用1x1作为瓶颈层减少特征数量。在DenseNet中这样特别有效,鉴于此设计了一个瓶颈版本的DenseNet-B,其 H ( ⋅ ) H(·) H(⋅)=BN-ReLU-Conv(1x1)-BN-ReLU-Conv(3x3),其中我们让1x1卷积产生4K个特征图
压缩(Compression):θ
首先明确一点,如图2中,DenseBlock是由多个 H ( ⋅ ) H(·) H(⋅)组成,而转换层是DenseBlock与DenseBlock之间的部分。瓶颈层是用于DenseBlock内的 H ( ⋅ ) H(·) H(⋅)压缩,而压缩是在转换层进行压缩。
为了进一步提高模型的紧凑性,我们可以减少转换层的特征数。如果DenseBlock包含了m个特指数,则后面的转换层产生的特征数为:θm,其中0<θ≤1,显然当θ=1时转换层的输入和输出特征数不变,也就是经过转换层后特征数不变。

我们定义θ<1的DenseNet为DenseNet-C(在实验中我们设置θ=0.5)
如果同时有瓶颈层(DenseNet-B)和θ<1,则称该类型的为DenseNet-BC
实现细节
在除ImageNet之外的所有数据集中,我们使用的DenseNet有三个DenseBlock,每个DenseBlock都有相同的层数。
在进入第一个DenseBlock前,会先经过一个输出通道为16(或者为DenseNet-BC的增长率的两倍)的卷积操作
对于3x3的卷积层,使用zero-padded保证特征图尺寸不变
我们使用1x1卷积+2x2均值池化作为DenseBlock之间的转换层
在最后一个DenseNet,使用全局均值池化+softmax分类器
三个DenseBlock的特征图尺寸是32x32、16x16和8x8(DenseBlock本身不会改变特征图尺寸,所以是转换层导致的尺寸变化)
我们的实验在这几个基础DenseNet上实验(L指层数,见第3节第一句;K指增长率,见第3节Growth rate):
- L = 40 , K = 12 {L=40,K=12} L=40,K=12
- L = 100 , K = 12 {L=100,K=12} L=100,K=12
- L = 100 , K = 24 {L=100,K=24} L=100,K=24
对于DenseNet-BC:
- L = 100 , K = 12 {L=100,K=12} L=100,K=12
- L = 250 , K = 24 {L=250,K=24} L=250,K=24
- L = 190 , K = 40 {L=190,K=40} L=190,K=40
在ImageNet实验上,我们在224x224的输入上使用有4个DenseBlock的DenseNet-BC结构。最开始的卷积层输出通道为2K(也就是2倍增长率),使用7x7的卷积核大小,stride=2。其他所有层的特征数也是从设置k开始
表1是在ImageNet上的网络结构

4、实验
表2展示DenseNet在几种基准数据集上的效果,并且与最先进的架构进行了比较。可以看到error肯定是DenseNet最好,然后比如DenseNet(K=12)参数量也很少且性能也超过了164层的ResNet。
而且控制K=12就能很好平衡参数量和性能了

ImageNet
表3展示DenseNets在ImageNet数据集上的error
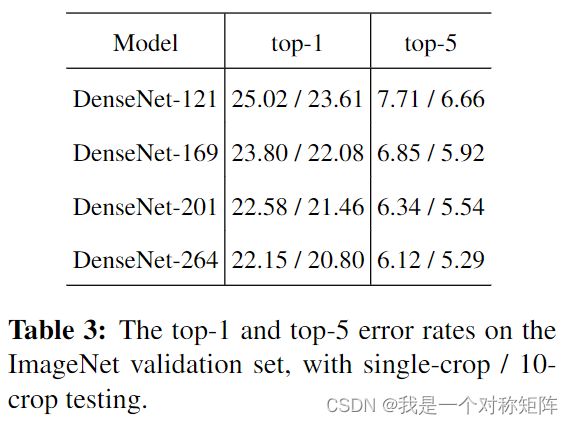
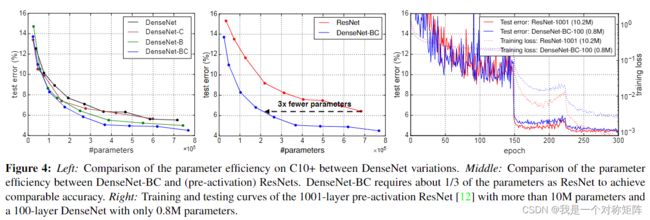
图3展示DenseNet与ResNet的比较,左边是参数量对比右边是FLOPs对比。可以看出相同error下,DenseNet需要的参数量和FLOPs更少

5、一些解释或者结论
隐形深度监督:对于DenseNet可以提高精度的一种解释是,各层通过短节从损失函数接收到额外的监督,可以将DenseNets解读为一种深度监督。深度监督的好处以前已经在深度监督网络(DSN)中显示出来,它的每个隐层都有分类器,强制中间层学习区别性特征。
6、结论
多短接实现特征重用,同时concat实现每层仅产生少量特征数后面也会concat很多通道数
通过1x1卷积瓶颈实现计算量的控制
通过比较在很多数据集上都实现了最优效果,参数量还很小