【专题】uC/OS-II内核架构解析(5)---uC/OS-II通信与同步
1. 消息邮箱Mbox
Mbox用于多任务间单一消息的传递,uC/OS-II使用ECB管理Mbox的基本信息,OSEventPtr指向创建Mbox时指定的内存空间。事件的创建由具体的事件管理程序实现。主要包含在C源文件OS_MBOX.C中。
- OS_EVENT *OSMboxCreate(void *msg);
- void *OSMboxPend(OS_EVENT *pevent, INT16U timeout, INT8U *err);
- void *OSMboxAccept(OS_EVENT *pevent);
- INT8U OSMboxPost(OS_EVENT *pevent, void *msg);
- INT8U OSMboxPostOpt(OS_EVENT *pevent, void *msg, INT8U opt);
- OS_EVENT *OSMboxDel(OS_EVENT *pevent, INT8U opt, INT8U *err);
- INT8U OSMboxQuery(OS_EVENT *pevent, OS_MBOX_DATA *);


2. 消息队列msgQ
(1) msgQ基本内容
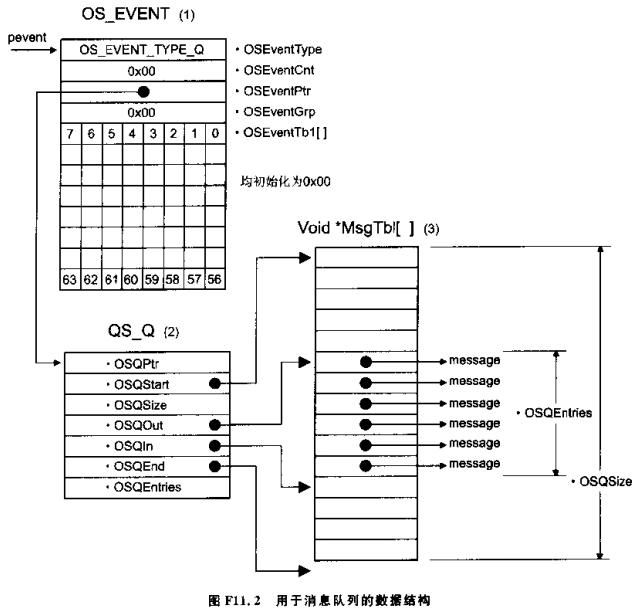
msgQ是uC/OS-II任务间通信的机制,可实现多条消息传递,即可以同时存储多条消息。uC/OS-II使用循环队列管理机制。主要包含在C源文件OS_Q.C中。
msgQ管理:使用指针数组存储所有消息的位置;使用QCB标识指针数组中消息的基本信息;使用ECB管理整个msgQ。QCB在编译时分配空间,即当前系统中可用的msgQ个数是预先设置的,系统运行时不能修改。

(2) msgQ全局变量
- OS_EXT OS_Q *OSQTbl[OS_MAX_QS]; //QCB结构体数组
- OS_EXT OS_Q *OSQFreeList; //空闲QCB头指针
- typedef struct os_q{ //消息队列控制块
struct os_q *OSQPtr; //用于构建空闲QCB链表
void **OSQStart; //指向msgQ指针数组的起始位置
void **OSQEnd; //指向msgQ指针数组的结束位置
void **OSQIn; //指向msgQ指针数组下一个可以插入消息的位置
void **OSQOut; //指向msgQ指针数组下一个可以读出消息的位置
INT16U OSQSize; //msgQ指针数组的大小
INT16U OSQEntries; //msgQ指针数组当前可以读取的消息个数
}OS_Q;
(3) msgQ管理函数
- OS_EVENT *OSQCreate(void **start, INT16U size);
- INT8U OSQPost(OS_EVENT *pevent, void *msg); //发送消息到队尾
- INT8U OSQPostFront(OS_EVENT *pevent, void *msg); //msg至队首
- INT8U OSQPostOpt(OS_EVENT *pevent, void *msg, INT8U opt);
- void *OSQPend(OS_EVENT *pevent, INT16U timeout, INT8U *err);
- void *OSQAccept(OS_EVENT *pevent, INT8U *err);
- OS_EVENT *OSQDel(OS_EVENT *pevent, INT8U opt, INT8U *err);
- INT8U OSQQuery(OS_EVENT *pevent, OS_Q_DATA*);
- INT8U OSQFlush(OS_EVENT *pevent);

(4) msgQ几个问题
uC/OS-II中,什么是事件?事件是uC/OS-II管理任务间同步与通信的机制。
事件是处理事件的对象感兴趣的,能够感知或捕获到一种事件状态的改变。
3. 信号量Sem
Sem主要用来实现任务间同步及标识某类资源的可用个数,即某个特定资源可供多少任务同时使用。主要包含在C源文件OS_SEM.C中。
- OS_EVENT *OSSemCreate(INT16U cnt);
- void OSSemPend(OS_EVENT *pevent, INT16U timeout, INT8U *err);
- INT16U OSSemAccept(OS_EVENT *pevent);
- INT8U OSSemPost(OS_EVENT *pevent);
- OS_EVENT *OSSemDel(OS_EVENT *pevent, INT8U opt, INT8U *err);
- INT8U OSSemQuery(OS_EVENT *pevent, OS_SEM_DATA*);
- void OSSemSet(OS_EVENT *pevent, INT16U cnt, INT8U *err);

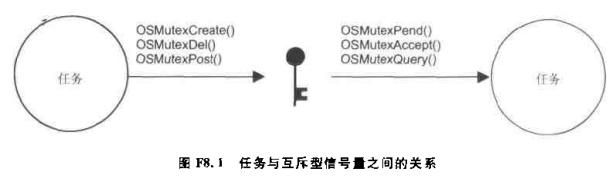
4. 互斥锁Mutex
(1) Mutex基本原理
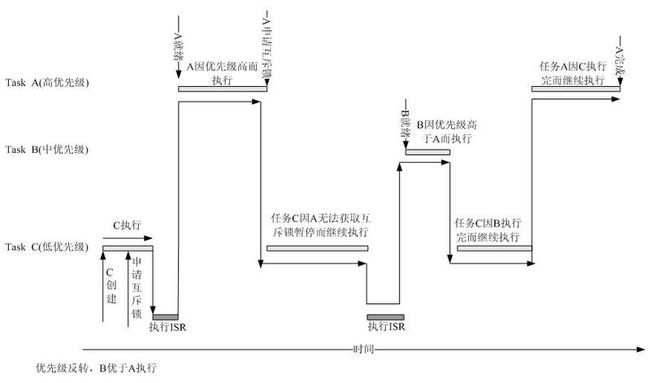
Mutex用来实现对资源的排他性访问,可能引起优先级反转。任何任务在占有某个互斥锁事件时,都不能阻塞等待其它任何事件,否则会造成死锁。主要包含在C源文件OS_MUTEX.C中。
优先级反转是指,低优先级任务占有高优先级任务运行所需的资源,而使高优先级不得不等低优先级任务把资源释放才能执行。
uC/OS-II使用ECB管理Mutex,其成员变量OSEventCnt:高8位存储Mutex被使用时提供给任务的prio;低8位在没有任务占有Mutex时为0xFF,否则为占有任务的prio。
优先级反转及优先级反转避免分别如下图所示:

(2) 提升/恢复优先级
a) 提升Mutex拥有者任务的优先级的相关操作:
- 如果该任务原来处于就绪状态,则从就绪表中将其删除;如果该任务正在等待某个事件,则从该事件的任务等待表中将其删除;
- 修改拥有Mutex的TCB,将其OSTCBPrio修改为欲提升的优先级;
- 如果该任务处于就绪状态,则将提升的优先级加载到任务就绪表中;如果该任务未就绪且正在等待某个事件,则将提升的优先级添加到该事件的任务等待表中,并修改TCB中OSTCBEventPtr;
- 修改TCB中与优先级相关的成员变量。
b) 恢复Mutex拥有任务的优先级的相关操作:
- 从任务就绪表中删除提升过的优先级值,修改当前TCB中与优先级相关的所有成员变量;
- 再次保留提升的优先级值控制块入口,避免将其分配给其它任务。
(3)Mutex管理函数
- #define OS_MUTEX_KEEP_LOWER_8 0x00FF
- #define OS_MUTEX_KEEP_UPPER_8 0xFF00
- #define OS_MUTEX_AVAILABLE 0x00FF
- OS_EVENT *OSMutexCreate(INT8U prio, INT8U *err);
- void OSMutexPend(OS_EVENT *pevent, INT16U timeout, INT8U *err);
- INT8U OSMutexAccept(OS_EVENT *pevent, INT8U *err);
- INT8U OSMutexPost(OS_EVENT *pevent);
- OS_EVENT *OSMutexDel(OS_EVENT*, INT8U opt, INT8U *err);
- INT8U OSMutexQuery(OS_EVENT*, OS_MUTEX_DATA*);
5. 事件组标志Flag
(1) Flag基本原理
uC/OS-II提供事件组标志实现多事件管理。Flag只是使用0/1来表示某个事件是否发生过,而不能直接被用来传递数据和消息。可以选择性地设置一个Flag最多可以管理的任务同步状态。主要包含在C源文件OS_FLAG.C中。
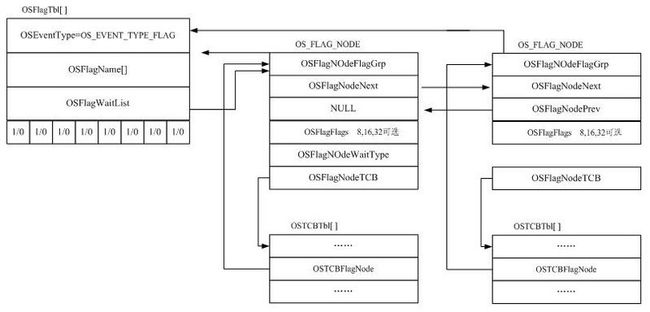
(2) Flag数据结构
- #define OS_FLAGS_NBITS 8/16/32 //定义OS_FLAGS的位数
- FCB结构体:
typedef struct os_flag_grp{
INT8U OSFlagType; //事件类型
void *OSFlagWaitList; //指向等待的任务链表
OS_FLAGS OSFlagFlags; //信号列表
INT8U OSFlagName[OS_FLAG_NAME_SIZE];
}OS_FLAG_GRP;
- 事件标志等待链表结点
typedef struct os_flag_node{
void *OSFlagNodeNext;
void *OSFlagNodePrev;
void *OSFlagNodeTCB;
void *OSFlagNodeFlagGrp; //指向此任务所等待的事件组标志
OS_FLAGS OSFlagNodeFlags; //等待的事件
INT8U OSFlagNodeWaitType; //等待方式
}OS_FLAG_NODE;
- OS_EXT OS_FLAG_GRP OSFlagTbl[OS_MAX_FLAGS];
- OS_EXT OS_FLAG_GRP *OSFlagFreeList;
- OS_FLAG_GRP *OSFlagCreate(OS_FLAGS flags, INT8U *err);
- OS_FLAGS OSFlagPend(OS_FLAG_GRP *pgrp, OS_FLAGS flags,
(3) Flag管理函数
- INT8U wait_type, INT16U timeout, INT8U *err);
- static void OS_FlagBlock(OS_FLAG_GRP *pgrp,
OS_FLAG_NODE *pnode,
OS_FLAGS flags,
INT8U wait_type, //挂起任务,
INT16U timeout); //直到等待的事件或超时
类似于:OS_EventTaskWait();
- void OS_FlagUnlink(OS_FLAG_NODE *pnode); //等待超时删除结点
类似于:OS_EventTO();
- OS_FLAGS OSFlagAccept(OS_FLAG_GRP *pgrp,
OS_FLAGS flags,
INT8U wait_type,
INT8U *err);
- OS_FLAGS OSFlagPost(OS_FLAG_GRP *pgrp,
OS_FLAGS flags,
INT8U opt,
INT8U *err);
- static BOOLEAN OS_FLAGTaskRdy(OS_FLAG_NODE *pnode,
OS_FLAGS flags_rdy);
- OS_FLAG_GRP *OSFlagDel(OS_FLAG_GRP*, INT8U opt, INT8U *err);
- OS_FLAGS OSFlagPendGetFlagsRdy(void); //获取任务就绪标志
- OS_FLAGS OSFlagQuery(OS_FLAG_GRP*, INT8U *err);
- INT8U OSFlagNameGet(OS_FLAG_GRP*, INT8U *pname, INT8U *err);
- void OSFlagNameSet(OS_FLAG_GRP*, INT8U *pname, INT8U *err);

6. Task就绪状态判断???
a) OSRdyTbl[ptcb->OSTCBY] & ptcb->OSTCBBitX != 0
如:函数OSMutexPend()
b) (ptcb->OSTCBStat & OS_STAT_SUSPEND) == OS_STAT_RDY
如:函数OSTimeTick()
c) ptcb->OSTCBStat == OS_STAT_RDY
如:函数OS_EventTaskRdy()