神经网络做多元线性回归,神经网络是线性模型吗
1、神经网络有哪些主要分类规则并如何分类?
神经网络模型的分类
人工神经网络的模型很多,可以按照不同的方法进行分类。其中,常见的两种分类方法是,按照网络连接的拓朴结构分类和按照网络内部的信息流向分类。
1
按照网络拓朴结构分类
网络的拓朴结构,即神经元之间的连接方式。按此划分,可将神经网络结构分为两大类:层次型结构和互联型结构。
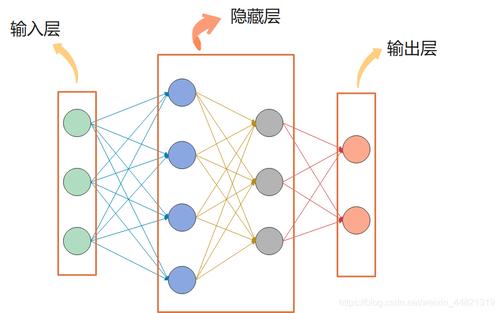
层次型结构的神经网络将神经元按功能和顺序的不同分为输出层、中间层(隐层)、输出层。输出层各神经元负责接收来自外界的输入信息,并传给中间各隐层神经元;隐层是神经网络的内部信息处理层,负责信息变换。根据需要可设计为一层或多层;最后一个隐层将信息传递给输出层神经元经进一步处理后向外界输出信息处理结果。
而互连型网络结构中,任意两个节点之间都可能存在连接路径,因此可以根据网络中节点的连接程度将互连型网络细分为三种情况:全互连型、局部互连型和稀疏连接型
2
按照网络信息流向分类
从神经网络内部信息传递方向来看,可以分为两种类型:前馈型网络和反馈型网络。
单纯前馈网络的结构与分层网络结构相同,前馈是因网络信息处理的方向是从输入层到各隐层再到输出层逐层进行而得名的。前馈型网络中前一层的输出是下一层的输入,信息的处理具有逐层传递进行的方向性,一般不存在反馈环路。因此这类网络很容易串联起来建立多层前馈网络。
反馈型网络的结构与单层全互连结构网络相同。在反馈型网络中的所有节点都具有信息处理功能,而且每个节点既可以从外界接受输入,同时又可以向外界输出。
谷歌人工智能写作项目:小发猫

2、CNN(卷积神经网络)、RNN(循环神经网络)、DNN(深度神经网络)的内部网络结构有什么区别?
如下:
1、DNN:存在着一个问题——无法对时间序列上的变化进行建模神经网络可以存在多元共线性吗。然而,样本出现的时间顺序对于自然语言处理、语音识别、手写体识别等应用非常重要。对了适应这种需求,就出现了另一种神经网络结构——循环神经网络RNN。
2、CNN:每层神经元的信号只能向上一层传播,样本的处理在各个时刻独立,因此又被称为前向神经网络。
3、RNN:神经元的输出可以在下一个时间戳直接作用到自身,即第i层神经元在m时刻的输入,除了(i-1)层神经元在该时刻的输出外,还包括其自身在(m-1)时刻的输出!
介绍
神经网络技术起源于上世纪五、六十年代,当时叫感知机(perceptron),拥有输入层、输出层和一个隐含层。输入的特征向量通过隐含层变换达到输出层,在输出层得到分类结果。早期感知机的推动者是Rosenblatt。
在实际应用中,所谓的深度神经网络DNN,往往融合了多种已知的结构,包括卷积层或是LSTM单元。
3、神经网络的历史是什么?
沃伦·麦卡洛克和沃尔特·皮茨(1943)基于数学和一种称为阈值逻辑的算法创造了一种神经网络的计算模型。这种模型使得神经网络的研究分裂为两种不同研究思路。一种主要关注大脑中的生物学过程,另一种主要关注神经网络在人工智能里的应用。
一、赫布型学习
二十世纪40年代后期,心理学家唐纳德·赫布根据神经可塑性的机制创造了一种对学习的假说,现在称作赫布型学习。赫布型学习被认为是一种典型的非监督式学习规则,它后来的变种是长期增强作用的早期模型。从1948年开始,研究人员将这种计算模型的思想应用到B型图灵机上。
法利和韦斯利·A·克拉克(1954)首次使用计算机,当时称作计算器,在MIT模拟了一个赫布网络。纳撒尼尔·罗切斯特(1956)等人模拟了一台 IBM 704计算机上的抽象神经网络的行为。
弗兰克·罗森布拉特创造了感知机。这是一种模式识别算法,用简单的加减法实现了两层的计算机学习网络。罗森布拉特也用数学符号描述了基本感知机里没有的回路,例如异或回路。这种回路一直无法被神经网络处理,直到保罗·韦伯斯(1975)创造了反向传播算法。
在马文·明斯基和西摩尔·派普特(1969)发表了一项关于机器学习的研究以后,神经网络的研究停滞不前。他们发现了神经网络的两个关键问题。
第一是基本感知机无法处理异或回路。第二个重要的问题是电脑没有足够的能力来处理大型神经网络所需要的很长的计算时间。直到计算机具有更强的计算能力之前,神经网络的研究进展缓慢。
二、反向传播算法与复兴
后来出现的一个关键的进展是保罗·韦伯斯发明的反向传播算法(Werbos 1975)。这个算法有效地解决了异或的问题,还有更普遍的训练多层神经网络的问题。
在二十世纪80年代中期,分布式并行处理(当时称作联结主义)流行起来。戴维·鲁姆哈特和詹姆斯·麦克里兰德的教材对于联结主义在计算机模拟神经活动中的应用提供了全面的论述。
神经网络传统上被认为是大脑中的神经活动的简化模型,虽然这个模型和大脑的生理结构之间的关联存在争议。人们不清楚人工神经网络能多大程度地反映大脑的功能。
支持向量机和其他更简单的方法(例如线性分类器)在机器学习领域的流行度逐渐超过了神经网络,但是在2000年代后期出现的深度学习重新激发了人们对神经网络的兴趣。
三、2006年之后的进展
人们用CMOS创造了用于生物物理模拟和神经形态计算的计算设备。最新的研究显示了用于大型主成分分析和卷积神经网络的纳米设备具有良好的前景。
如果成功的话,这会创造出一种新的神经计算设备,因为它依赖于学习而不是编程,并且它从根本上就是模拟的而不是数字化的,虽然它的第一个实例可能是数字化的CMOS设备。
在2009到2012年之间,Jürgen Schmidhuber在Swiss AI Lab IDSIA的研究小组研发的循环神经网络和深前馈神经网络赢得了8项关于模式识别和机器学习的国际比赛。
例如,Alex Graves et al.的双向、多维的LSTM赢得了2009年ICDAR的3项关于连笔字识别的比赛,而且之前并不知道关于将要学习的3种语言的信息。
IDSIA的Dan Ciresan和同事根据这个方法编写的基于GPU的实现赢得了多项模式识别的比赛,包括IJCNN 2011交通标志识别比赛等等。
他们的神经网络也是第一个在重要的基准测试中(例如IJCNN 2012交通标志识别和NYU的扬·勒丘恩(Yann LeCun)的MNIST手写数字问题)能达到或超过人类水平的人工模式识别器。
类似1980年Kunihiko Fukushima发明的neocognitron和视觉标准结构(由David H. Hubel和Torsten Wiesel在初级视皮层中发现的那些简单而又复杂的细胞启发)那样有深度的、高度非线性的神经结构可以被多伦多大学杰弗里·辛顿实验室的非监督式学习方法所训练。
2012年,神经网络出现了快速的发展,主要原因在于计算技术的提高,使得很多复杂的运算变得成本低廉。以AlexNet为标志,大量的深度网络开始出现。
2014年出现了残差神经网络,该网络极大解放了神经网络的深度限制,出现了深度学习的概念。
构成
典型的人工神经网络具有以下三个部分:
1、结构(Architecture)结构指定了网络中的变量和它们的拓扑关系。例如,神经网络中的变量可以是神经元连接的权重(weights)和神经元的激励值(activities of the neurons)。
2、激励函数(Activation Rule)大部分神经网络模型具有一个短时间尺度的动力学规则,来定义神经元如何根据其他神经元的活动来改变自己的激励值。一般激励函数依赖于网络中的权重(即该网络的参数)。
3、学习规则(Learning Rule)学习规则指定了网络中的权重如何随着时间推进而调整。这一般被看做是一种长时间尺度的动力学规则。一般情况下,学习规则依赖于神经元的激励值。它也可能依赖于监督者提供的目标值和当前权重的值。
例如,用于手写识别的一个神经网络,有一组输入神经元。输入神经元会被输入图像的数据所激发。在激励值被加权并通过一个函数(由网络的设计者确定)后,这些神经元的激励值被传递到其他神经元。
这个过程不断重复,直到输出神经元被激发。最后,输出神经元的激励值决定了识别出来的是哪个字母。