《动手深度学习》2.3线性代数
《动手深度学习》2.3线性代数
-
- 基本运算
-
-
- 哈达玛积Hadamard product
-
- 降维&非降维
-
-
- 降维操作
- 非降维求和,保持轴数不变
- cumsum累加求和,各轴维度也不变
-
- 乘法操作
-
-
- 点积
- 矩阵-向量乘法
- 矩阵-矩阵乘法
-
- 向量范数 norm
-
-
- L1范数
- L2范数,即默认的norm()函数
- Lp范数
- 矩阵范数——Frobenius范数
- 范数和目标
-
- 2.3.13 练习
基本运算
哈达玛积Hadamard product
指 两个矩阵的按元素乘法:数学符号⊙;
python运算:A*B

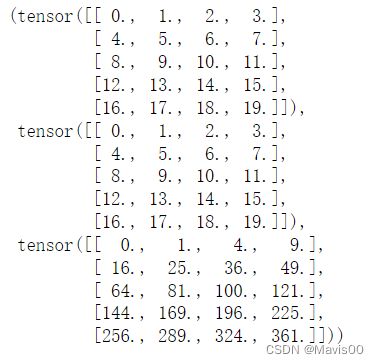
A = torch.arange(20, dtype=torch.float32).reshape(5, 4)
B = A.clone()
A,B,A*B
降维&非降维
降维操作
- 降维的手段有很多,比如:求和A.sum(),求均值…
- 默认情况下,调用求和函数会沿所有的轴降低张量的维度,使它变为一个标量。
- 可以指定张量沿哪一 个轴来通过求和降低维度: A.sum(axis=0)表示对所有行求和,A.sum(axis=1)表示对所有列求和
A_sum_axis0 = A.sum(axis = 0)
A_sum_axis0, A_sum_axis0.shape
![]()
按axis = 0降维后,轴0消失,只剩下轴1的维数(即列数4)
A_sum_axis1 = A.sum(axis = 1)
A_sum_axis1, A_sum_axis1.shape
![]()
按axis = 1降维后,轴1消失,只剩下轴0的维数(即行数5)
- 平均值降维
A.mean(), A.sum() / A.numel()
![]()
- 对所有行求平均值降维,注意行数用A.shape[0]得到
A.mean(axis = 0),A.sum(axis = 0)/A.shape[0]
![]()
非降维求和,保持轴数不变
- 利用keepdims = True保持求和结果仍为二维矩阵,但是变成了5x1,列的dim变成了1
A.sum(axis=1, keepdims=True)

cumsum累加求和,各轴维度也不变
- cumsum函数:沿某个轴计算矩阵元素的累积总和,比如axis=0(按行计算累积和)。如此,不仅轴数不变,各轴的维度dim也保持不变。
A.cumsum(axis = 0)

乘法操作
点积
两种方法:
- torch.dot(x, y)
x = torch.arange(4, dtype=torch.float32)
y = torch.ones(4, dtype=torch.float32)
x,y,torch.dot(x,y)
![]()
- 先执行按元素乘法,再求和来计算点积
torch.sum(x*y), (x*y).sum()
![]()
矩阵-向量乘法
- 前提:矩阵A的列数=向量x的维数
- python命令:torch.mv(A, x)

A.shape, x.shape, torch.mv(A, x)
![]()
矩阵-矩阵乘法
- 前提:A的列数 = B的行数
- python命令:torch.mm(A,B)

B = torch.ones(4, 3)
A.shape, B.shape, torch.mm(A, B)

向量范数 norm
L1范数
对各个元素的绝对值求和
u = torch.tensor([3.0, -4.0])
L1 = torch.abs(u).sum()
L1
![]()
L2范数,即默认的norm()函数
u = torch.tensor([3.0, -4.0])
L2 = torch.norm(u)
L2
![]()
Lp范数

矩阵范数——Frobenius范数
矩阵元素平方和的平方根,类似于向量的L2范数,直接用torch.norm(矩阵)。
K = torch.ones((2, 8))
K, torch.norm(K)
范数和目标
在深度学习中,解决优化问题时,目标函数,通常被表达为范数。比如:
- 最大化分配给观测数据的概率;
- 最小化预测和真实观测之间的距离;
- 用向量表示物品(如单词、产品或新闻文章),以便最小化相似项目之间的距离,最大化不同项目之间 的距离。
2.3.13 练习
7.考虑一个具有形状(2, 3, 4)的张量,在轴0、1、2上的求和输出是什么形状?
- axis = 0
X = torch.randint(1,10,(2,3,4))
Y = torch.sum(X,axis = 0)
X,Y, Y.shape
按第一个维度进行加法运算,运算后第一个维度被消除,得到3x4的矩阵

- axis = 1
X = torch.randint(1,10,(2,3,4))
Y = torch.sum(X,axis = 1)
X,Y, Y.shape
对两个矩阵分别对所有行求和,每个矩阵被压缩为一个1x4的向量。
4+7+1=12,8+3+9=20,6+9+1=16,2+5+5=12
所以有行向量[12,20,16,12]

- axis = 2
Y = torch.sum(X,axis = 2,)
X,Y, Y.shape
4+8+6+2=20;
7+3+9+5=24;
1+9+1+5=16;所以得到[20,24,16]

axis = 2且保持轴数不变的话:

8. 为linalg.norm函数提供3个或更多轴的张量,并观察其输出。对于任意形状的张量这个函数计算得到什么
X = torch.ones(2,3,6)
L2 = torch.norm(X)
X,L2