鸿蒙系统电子琴项目开发
系统初识
- 1.课程内容简介
-
- 1.1 鸿蒙简介
- 1.2 应用场景
- 1.3 技术架构**
- 1.3 鸿蒙系统的不同,创新
- 1.4 鸿蒙的开发方向(南向开发和北向开发)--(上北下南)
- 1.5 学习方法
- 2 C语言简介
-
- 2.1 硬件平台
- 2.2 编码开发环境搭建
- 2.3 鸿蒙核心开发板开发环境搭建(day03)
- 2.4 元气派开发环境
- 3. WIFI联网测试
- 4. 多线程
- 5. 定时器
- 5. 点亮第一盏灯
-
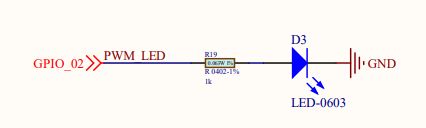
- 5.1 内置的LED gpio2(高电平点亮)
- 5.2 自己外接的LED
- 5.3 开关控制Led灯的亮灭
- 6.PWM-呼吸灯
- 7.PWM控制频率播放曲目
- 8. WIFI
-
- 8.1 wifi的AP模式(路由器的效果,创建网络)
- 8.2 wifi的STA模式(连接网络)
- 8.3 TCP客户端(服务器端与Linux网络编程都类似)
- 8.3.1 结果
- 8.3.2 代码
- 9 案例:使用电脑控制开发板io口
- 10 案例:
1.课程内容简介
Linux基础,GPIO, PWM, wifi, ap创建和socket通信,
1.1 鸿蒙简介
操作系统 = 内核 + 功能组件
harmonyos和openharmonyos区别?
OpenHarmony 华为开源的是OpenHarmony,OpenHarmony相当于Android的AOSP(Android Open Source Project),即Android开源项目。所以OpenHarmony是一个开源项目,具有最基础的操作系统能力,任何组织机构和个人都可以下载使用,也可以贡献代码。
Openmonyos打包HMS形成HarmonyOS商业版操作系统。
1.2 应用场景
- 1+8+N
- 生态
上下游厂商共建的体系。
1.3 技术架构**
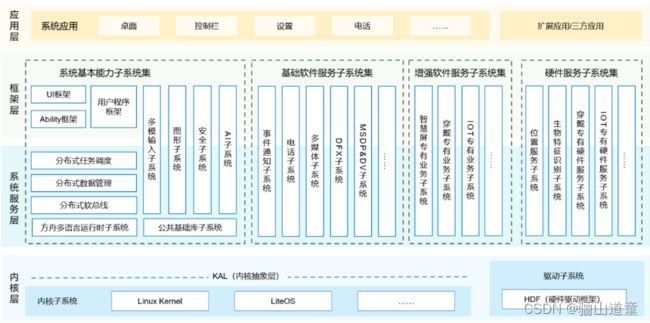
- 微内核和宏内核
微内核更安全
宏内核效率更高
微内核模块化、耦合性更低
Kernel mode
User Mode
1.3 鸿蒙系统的不同,创新
纵向分模块&横向分层
软总线和分布式调度
传统总线
总线是一种内部结构,它是cpu、内存、输入、输出设备传递信息的公用通道,主机的各个部件通过总线相连接,外部设备通过相应的接口电路再与总线相连接,从而形成了计算机硬件系统。
app场景开发 hap功能

1.4 鸿蒙的开发方向(南向开发和北向开发)–(上北下南)
北向 是纯软件开发,一般用java、js、C++等语言,注重业务逻辑,目标是实现应用功能,满足客户需求
南向 是软硬件结合的嵌入式开发,一般用C、C++,注重硬件操作和 能力封装,目标是提供北向API的内部实现
1.5 学习方法
盲人摸象:整体了解,再了解某些模块
2 C语言简介
2.1 硬件平台
购买链接:小熊派鸿蒙季BearPi-HM_Nano HarmonyOS 鸿蒙系统Hi3861开发板NFC.
BearPi-HM Nano(小熊牌开发板 RAM352kB,ROM288KB,2M Flash)
MCU:Hi3861RNIV100
E53 Inface
Reset Key
User’s Key
NFC:NT3H1201W0FHKH
NFC天线
USB Type-C Power-C supply
CH340E
2.2 编码开发环境搭建
- 使用mingw + Clion开发:
http://www.javashuo.com/article/p-pathshht-dp.html
1.安装mingw
2.安装Clion
---激活方法:https://www.yuque.com/docs/share/51f8cb83-f8c4-4b95-9f4f-d5f5ef66db7e
- 使用QT开发:
Qt creator创建纯C/C++源代码的开发环境.
利用cmake构建:QT使用Cmake编译和构建项目.
cmake添加环境变量:
https://www.cnblogs.com/pscly/p/12837561.html
华为官网按照Hi386编译和配置开发板.
2.3 鸿蒙核心开发板开发环境搭建(day03)
鸿蒙的代码在Windows编写,Linux上编译,samba和ssh传递文件,windows上烧录。
Linux系统开发环境搭建
https://robot.czxy.com/ohos/day04/harmony_linux_env.html
未做:
sudo update-alternatives --install /usr/bin/python python /usr/bin/python3.8 1
sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.8 1
2 设置python和python3软链接为python3.8
**hb安装出问题时0.4.6版本有问题:reaises …
采用0.4.3版本。**下载whl:https://pypi.org/project/ohos-build/0.4.3/#files
pip install ohos_build-0.4.3-py3-none-any.whl
https://pypi.org/project/ohos-build/#modal-close
2.4 元气派开发环境
pycrytodome安装太慢,同样使用离线安装方式。下载软件地址,得到whl:
https://pypi.org/project/pycryptodome/3.11.0/#files

samba环境搭建成功!
虚拟机开服务端
windows开客户端
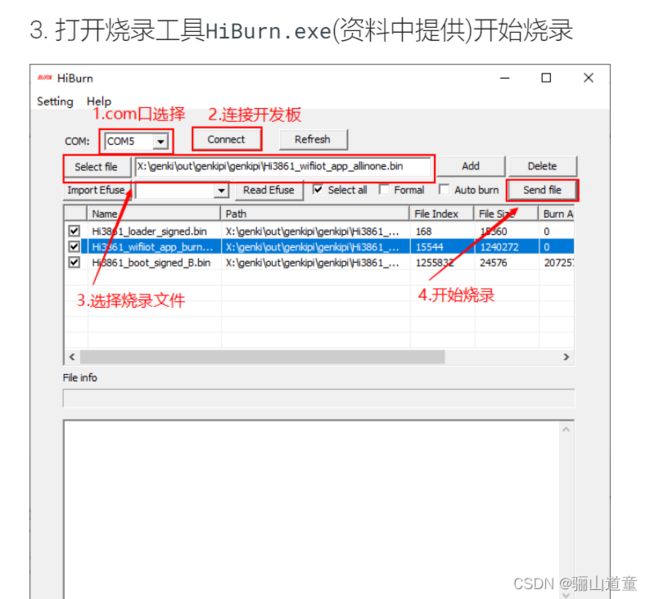
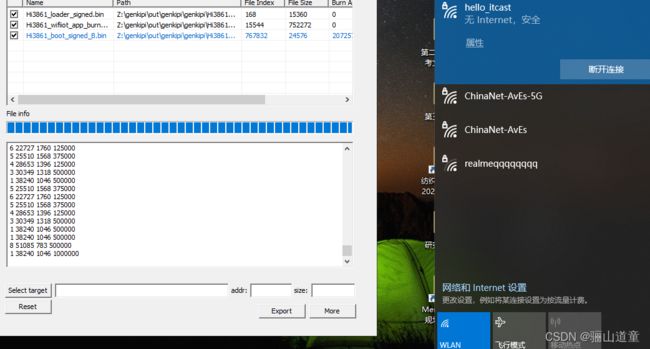
1.烧录流程
注意,先1.com选择,2.连接,再断开连接
3.select file 4.再次点击Connect (在开发板再按reset) 5.send file烧录
否则会烧录失败。
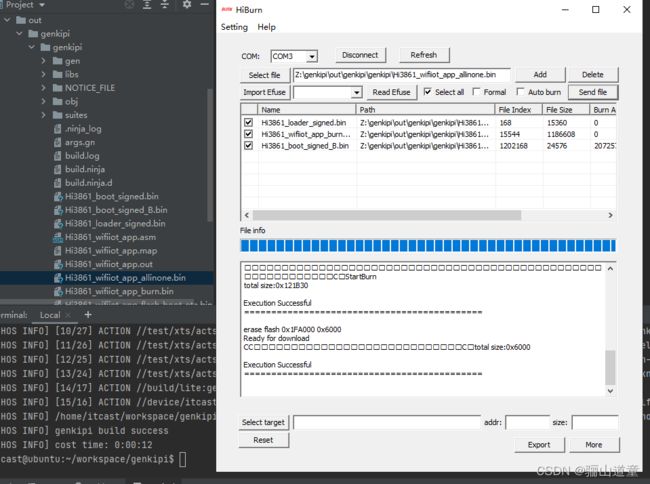
2.wifi烧录成功的截图
3. WIFI联网测试
AT测试(路由器)
1.启动STA模式
AT+STARTSTA
扫描周边的网络
AT+SCAN
查看扫描结果
AT+SCANRESULT
4. 多线程
5. 定时器
执行结果
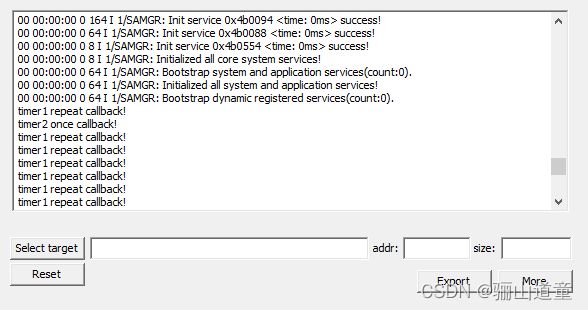
id1 = osTimerNew(timer_repeat_callback, osTimerPeriodic, NULL, NULL);
if (id1 != NULL)
{
status = osTimerStart(id1, timerDelay);
if (status != osOK)
{
// Timer could not be started
//执行体
}
}
附加:小熊牌下载源码并编译的方法:
方法一:依靠hpm从华为仓库下载源码并编译;
再执行:
hpm dist

方法二:
git clone 源码地址
然后cd到含有build.py的代码目录(代码主目录),执行–
python build.py BearPi-HM_Nano
自己已经在家目录写好一个bb.sh脚本,直接sh 编译。
5. 点亮第一盏灯
5.1 内置的LED gpio2(高电平点亮)
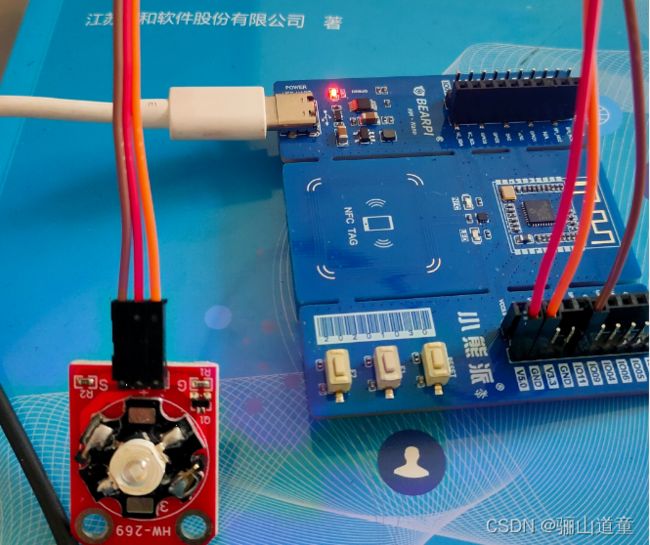
5.2 自己外接的LED
(G接gnd,S接信号,就是gpio管脚,+接+5V或者3.3V引脚)
// 外接引脚,gpio11,0.1秒闪烁
// Created by 24302 on 2022/2/18.
//
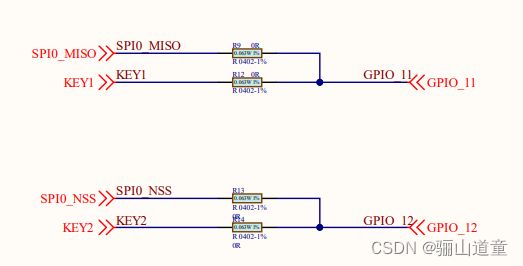
#include5.3 开关控制Led灯的亮灭
bearpi自带的key1和key2开关,对应的管脚如下:
//
// Created by 24302 on 2022/2/18.
//
#include6.PWM-呼吸灯
呼吸灯
//
// Created by 24302 on 2022/2/20.
//
#include 文件夹pwd_led内的BUILD.gn
static_library("pwm_led") {
sources = [
"main.c"
]
include_dirs = [
"//utils/native/lite/include",
"//base/iot_hardware/peripheral/interfaces/kits",
"//device/itcast/genkipi/interfaces/kits"
]
}
项目的BUILD.gn
import("//build/lite/config/component/lite_component.gni")
lite_component("app") {
features = [
"pwm_led"
]
}
7.PWM控制频率播放曲目
//
// Created by 24302 on 2021/12/18.
//
#include 8. WIFI
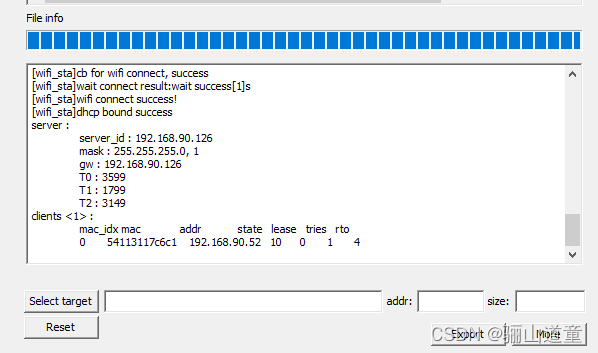
8.1 wifi的AP模式(路由器的效果,创建网络)
#include8.2 wifi的STA模式(连接网络)
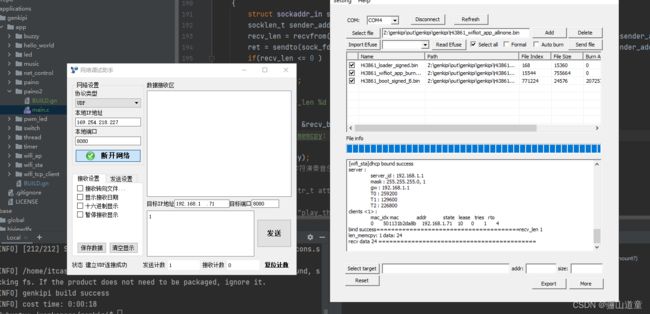
8.3 TCP客户端(服务器端与Linux网络编程都类似)
8.3.1 结果
-使用网络调试助手模拟服务器,每隔一秒发送Hello word到服务器,运行结果截图。
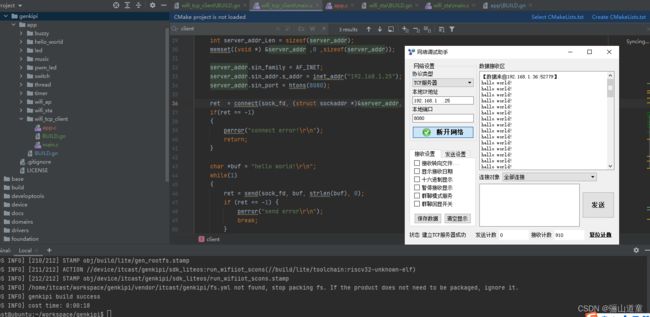
8.3.2 代码
#include9 案例:使用电脑控制开发板io口
点亮一盏灯,远程wifi控制家庭设备应用场景。
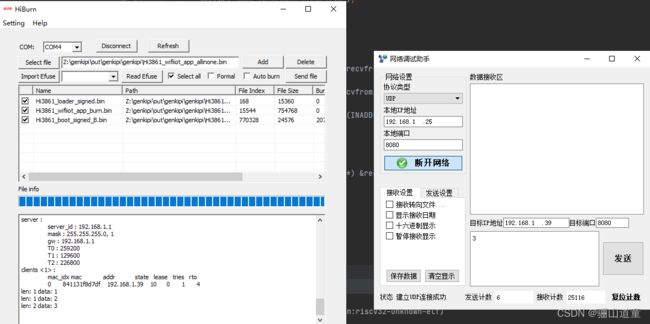
10 案例:

鸿蒙电子琴应用的通信部分,wifi连接我通信正常,蜂鸣器测试正常,通信测试可发送信息,目前发送时char类型,开发板需要uint_8类型,ASII码转换“”“1”为24
#include