局部加权线性回归
前言:
在数据处理或图像处理中,回归往往可以达到很好的效果。
回归的目的就是训练算法,进而找到回归系数。
1、线性回归
怎样从一大堆数据里求出回归方程呢?
假定输入数据存放在矩阵X中,回归系数存放在向量w中,那么对于给定的数据X1,预测结果Y1 = X1Tw。
问题点:有一些X和对应的Y,怎么找到w?
常用的方法是找到一个w,使得误差最小。这里的误差指的是预测值y与真实值y之间的差值。
平方误差写作: ∑ i = 1 m \sum_{i=1}^m ∑i=1m(yi - xiTw)2
用矩阵表示可以写作(y - xw)T(y - xw)。对w求导,得到xT(y - xw),令其等于0,解出w如下:
![]()
其中w~ 是当前可以估计出的w最优解(而非真实w值)
尝试对以下散点图找出最佳拟合直线

程序清单1:标准回归函数
def standRegress(xArr , yArr):
xMat = np.mat(xArr)
yMat = np.mat(yArr).T
xTx = xMat.T*xMat
if 0.0 == np.linalg.det(xTx) :
print("This matrix is singular, cannot do inverse . ")
return
ws = xTx.I * (xMat.T * yMat)
return ws
绘制出的拟合直线如下
最佳拟合直线方法表现不错,但欠拟合也挺严重的。
2、局部加权线性回归
模型欠拟合将不能取得最好的预测效果。所以有些方法允许在估计中引入一些偏差,从而降低预测的均方误差。
其中一个方法—局部加权线性回归。该方法中,给待测点附近的每个点赋予一定权重。
![]()
其中W是一个矩阵,用来给每个数据点赋予权重。
LWLR使用"核"来对附近的点赋予更高的权重。本例使用高斯核,高斯核对应的权重如下:
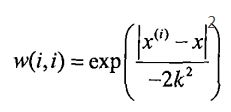
这样就构建了一个只含对角元素的权重矩阵W(该W即为上式的权重矩阵),其中x表示待预测点,x(i)表示待预测点附近的点。
x与x(i)越近,w(i,i)越大。k是一个需要用户指定的参数,k决定了对附近点赋予多大的权重。
下图绘制了k与权重的关系

程序2:局部加权线性回归函数
#########################
##函数描述:计算权重
##testPlint :某个待测点
## xArr , yArr :数据点
#########################
def lwlr(testPlint , xArr , yArr , k = 1.0 ):
xMat = np.mat(xArr)
yMat = np.mat(yArr).T
m = np.shape(xMat)[0]
weights = np.mat(np.eye((m))) #创建对角矩阵,为每个样本点初始化一个权重
for j in range(m): #计算每个样本点对应的权重值
diffMat = testPoint - xMat[ j , : ]
#随着样本点与待测点距离的递增,权重将以指数级衰减,参数k控制衰减速度
weights[j , j ] = np.exp((diffMat * diffMat.T)/(-2*k**2))
xTx = xMat.T * ( weights * xMat )
if (0.0 == np.linalg.det(xTx)):
print("This matrix is singular, cannot do inverse . ")
return
ws = xTx.I * (xMat.T * (weights * yMat))
return testPoints * ws
#########################
##函数描述:计算预测结果
##testArr :待测矩阵
## xArr , yArr :数据点
#########################
def lwlrtest(testArr , xArr , yArr , k = 1.0):
m = np.shape(testArr)[0] #样本数目
yHat = zeros(m)
for j in range(m):
yHat[i] = lwlr(testArr[i] , xArr , yArr , k )
return yHat
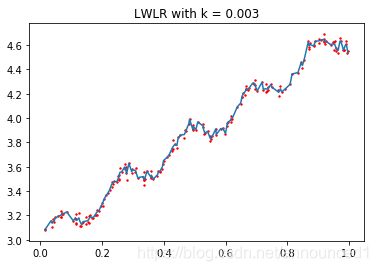
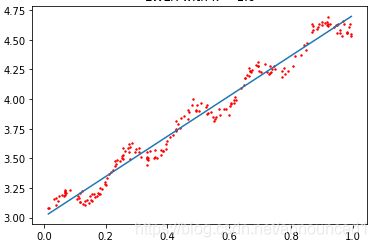
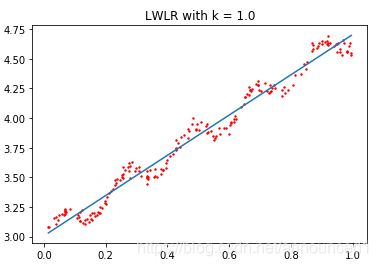
拟合结果如下图:
欠拟合
拟合
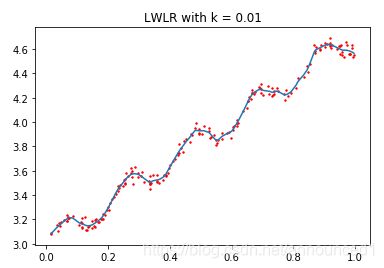
过拟合