一文读懂传感器
一文读懂传感器
传感器在原理与结构上千差万别,如何根据具体的测量目的、测量对象以及测量环境合理地选用传感器,是在进行某个量的测量时首先要解决的问题。
当传感器确定之后,与之相配套的测量方法和测量设备也就可以确定了。测量结果的成败,在很大程度上取决于传感器的选用是否合理。
1、根据测量对象与测量环境确定传感器的类型
要进行—个具体的测量工作,首先要考虑应采用何种原理的传感器,这需要分析多方面的因素之后才能确定。
因为,即使是测量同一物理量,也有多种原理的传感器可供选用,哪一种原理的传感器更为合适,则需要根据被测量的特点和传感器的使用条件考虑以下一些具体问题:
(1)量程的大小;
(2)被测位置对传感器体积的要求;
(3)测量方式为接触式还是非接触式;
(4)信号的引出方法,有线或是非接触测量;
(5)传感器的来源,国产还是进口,价格能否承受,还或者是自行研制。
在考虑上述问题之后就能确定选用何种类型的传感器,然后再考虑传感器的具体性能指标。
2、灵敏度的选择
通常,在传感器的线性范围内,希望传感器的灵敏度越高越好。因为只有灵敏度高时,与被测量变化对应的输出信号的值才比较大,有利于信号处理。但要注意的是,传感器的灵敏度高,与被测量无关的外界噪声也容易混入,也会被放大系统放大,影响测量精度。因此,要求传感器本身应具有较高的信噪比,尽量减少从外界引入的干扰信号。
传感器的灵敏度是有方向性的。当被测量是单向量,而且对其方向性要求较高,则应选择其它方向灵敏度小的传感器;如果被测量是多维向量,则要求传感器的交叉灵敏度越小越好。
3、频率响应特性
传感器的频率响应特性决定了被测量的频率范围,必须在允许频率范围内保持不失真的测量条件,实际上传感器的响应总有—定延迟,希望延迟时间越短越好。
传感器的频率响应高,可测的信号频率范围就宽,而由于受到结构特性的影响,机械系统的惯性较大,因此频率低的传感器可测信号的频率较低。
在动态测量中,应根据信号的特点(稳态、瞬态、随机等)响应特性,以免产生过大的误差。
4、线性范围
传感器的线性范围是指输出与输入成正比的范围。从理论上讲,在此范围内,灵敏度保持定值。传感器的线性范围越宽,则其量程越大,并且能保证一定的测量精度。在选择传感器时,当传感器的种类确定以后首先要看其量程是否满足要求。
但实际上,任何传感器都不能保证绝对的线性,其线性度也是相对的。当所要求测量精度比较低时,在一定的范围内,可将非线性误差较小的传感器近似看作线性的,这会给测量带来极大的方便。
5、稳定性
传感器使用一段时间后,其性能保持不变化的能力称为稳定性。影响传感器长期稳定性的因素除传感器本身结构外,主要是传感器的使用环境。因此,要使传感器具有良好的稳定性,传感器必须要有较强的环境适应能力。
在选择传感器之前,应对其使用环境进行调查,并根据具体的使用环境选择合适的传感器,或采取适当的措施,减小环境的影响。
传感器的稳定性有定量指标,在超过使用期后,在使用前应重新进行标定,以确定传感器的性能是否发生变化。在某些要求传感器能长期使用而又不能轻易更换或标定的场合,对所选用的传感器的稳定性要求更严格,要能够经受住长时间的考验。
6、精度
精度是传感器的一个重要的性能指标,它是关系到整个测量系统测量精度的一个重要环节。传感器的精度越高,其价格越昂贵,因此,传感器的精度只要满足整个测量系统的精度要求就可以,不必选得过高。这样就可以在满足同一测量目的的诸多传感器中选择比较便宜和简单的传感器。
如果测量目的是定性分析的,选用重复精度高的传感器即可,不宜选用绝对量值精度高的;如果是为了定量分析,必须获得精确的测量值,就需选用精度等级能满足要求的传感器。
对某些特殊使用场合,无法选到合适的传感器,则需自行设计制造传感器。自制传感器的性能应满足使用要求。
7、霍尔传感器测量方法
单极开关型霍尔元件的好坏检测
将单极开关霍尔元件通电5V,输出端串联电阻,当磁铁远离开关霍尔元件时,开关霍尔元件的输出电压为高电平(+5V),当磁铁靠近开关霍乐元件时,开关霍尔元件的输出电压为低电平(+0.2V左右),这说明该开关开型霍尔元件是好的。如果不认靠近或离开霍尔开关,该霍尔开关的输出电平保持不变,则说明该霍尔开关已损坏。
双极锁存霍尔开关元件的好坏检测
当磁铁N极或S极靠近霍尔开关,输出是高电平或低电平,然后拿开霍尔元件,电平保持不变,再用刚才相反的磁极得到与刚刚相反的电平,这时说明霍尔元件是好的,如果当霍尔元件靠近得到的电平,在磁铁离开后不锁存,说明霍尔是坏的,当磁铁用相反的极性靠近霍尔,得不到与另一个极性靠近霍尔所得出相反的电平,那么这个霍尔开关也是坏的。
8、霍尔电流传感器测量方法
原边导线应放置于传感器内孔中心,尽可能不要放偏 原边导线尽可能完全放满传感器内孔,不要留有空隙;需要测量的电流应接近于传感器的标准额定值IPN,不要相差太大。如条件所限,手头仅有一个额定值很高的传感器,而欲测量的电流值又低于额定值很多,为了提高测量精度,可以把原边导线多绕几圈,使之接近额定值。例如当用额定值100安的传感器去测量10安的电流时,为提高精度可将原边导线在传感器的内孔中心绕十圈(一般情况,NP=1;在内孔中绕一圈,NP=2;……;绕九圈,NP=10,则NP×10安=100安与传感器的额定值相等,从而可提高精度);当欲测量的电流值为IPN/10的时,在25℃仍然可以有较高的精度。
9、霍尔传感器测量转向方法
在一般的转动部件中,可以用霍尔传感器测量转速,比如发动机的转速。发动机的飞轮上有一圈齿,每个齿经过霍尔传感器时,会造成磁感应强度变化,这个磁感应强度变化能转换成电压的变化,计数器通过计数能够测量转速。
那么问题来了,计数器能够告诉你转速,但不能告诉你旋转的方向,怎么测量飞轮的正反转呢?见下图这里有两个霍尔传感器,一个用于测量转速,另一个用于测量转向。测量转速的霍尔传感器用上升沿触发,当转速传感器触发中断时,查看转向传感器的电位,如果转向传感器处于低电位,那么就判断为顺时针方向(根据实际情况确定);如果转速传感器触发中断时,转向传感器处于高电位,则为逆时针方向。
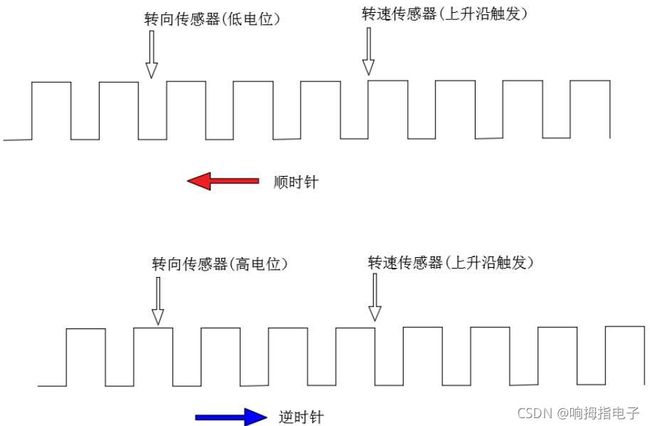
霍尔传感器测量转向方法
一文读懂传感器