ROS机器人编程学习(五)——ROS命令3
第5章 ROS命令
本章主要讲解了ROS下的常用操作命令,包括shell命令、执行命令、信息命令、catkin命令、功能包命令。
由于这一章内容实在太多了,因此博客分三节进行学习记录。本文主要记录catkin命令和功能包命令。
第5章 ROS命令
- 5 ROS catkin命令
- 6 ROS功能包命令
5 ROS catkin命令
ROS的catkin命令用于使用catkin 构建系统来构建功能包。

■ catkin_create_pkg:
catkin_create_pkg是创建一个包含CMakeLists.txt和package.xml文件的空功能包的命令。
catkin_create_pkg [功能包名称] [依赖性功能包1] [依赖性功能包2] ...
$ catkin_create_pkg my_package roscpp std_msgs
■ catkin_make:
catkin_make是构建用户创建的功能包或构建下载的功能包的命令。
构建 ~/catkin_ws/src 目录中所有功能包:
$ cd ~/catkin_ws
$ catkin_make
只构建一部分功能包,而不是全部功能包,使用“–pkg [包名]”选项:
$ catkin_make --pkg user_ros_tutorials
■ catkin_eclipse:
将以catkin构建系统生成的功能包修改成可以在Eclipse环境中使用的功能包。
$ cd ~/catkin_ws
$ catkin_eclipse
■ catkin_init_workspace:
初始化catkin构建系统的工作目录,除了特殊情况外,这个命令在ROS安装期间只执行一次。
■ catkin_find:
搜索catkin,找到并显示工作空间。
用户可以通过运行catkin_find命令来找出正在使用的所有工作目录。
如果执行“catkin_find [功能包名称]”,则会看到选项中指定的与功能包相关的工作目录。
$ catkin_find
$ catkin_find turtlesim
6 ROS功能包命令
ROS功能包命令用于操作ROS功能包,比如显示功能包信息、安装相关功能包,等。

■ rospack:
- 显示指定的ROS功能包的相关信息,如存储位置、依赖关系和整个功能包列表。
- 可以使用find、list、depends-on、depends和profile等选项。
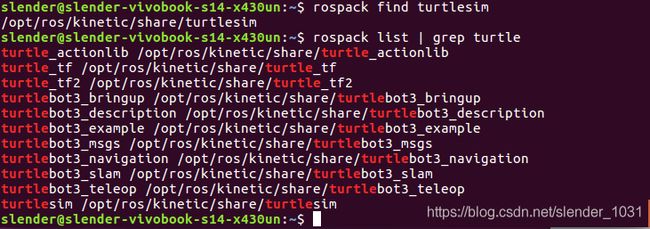
- 如果在rospack查找命令之后指定了功能包名称,会显示该功能包的存储位置。
rospack list 命令显示PC上的所有功能包。可以结合rospack list命令与Linux搜索命令grep来轻松找到该功能包。
rospack depends-on 命令之后指定了一个功能包名称,则仅显示使用该指定功能包的功能包列表。
rospack depends 命令之后指定了功能包名称,则会看到运行该功能包所需的依赖性功能包的列表。
■ rosdep:
rosdep是安装指定功能包的依赖性文件的命令。选项包括check、install、init和update。
执行“rosdep check [功能包名]”,会检查指定功能包的依赖关系。
执行“rosdep install package name”,将安装指定功能包的依赖功能包

■ roslocate:
显示ROS功能包的信息,例如功能包正在使用的ROS的版本、SCM类型和存储库位置等。
roslocate [选项] [功能包名称]
