关于2022年TI省赛--F题信号调制度测量装置
关于2022年TI省赛--F题信号调制度测量装置
- 赛题分析
- 理论分析
-
- AM信号处理方案
-
- 方案一:
- 方案二:
- FM信号处理方案
-
- 方案一:
- 方案二:
- FFT快速傅里叶变换与逆变换算法
- 带通抽样定律采样算法
- 电路设计
- 程序设计
-
- AD9910
- ADS8885
- 加窗函数
- 卡尔曼滤波
- 主要程序
- 结语
赛题分析
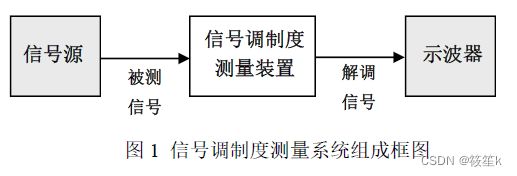
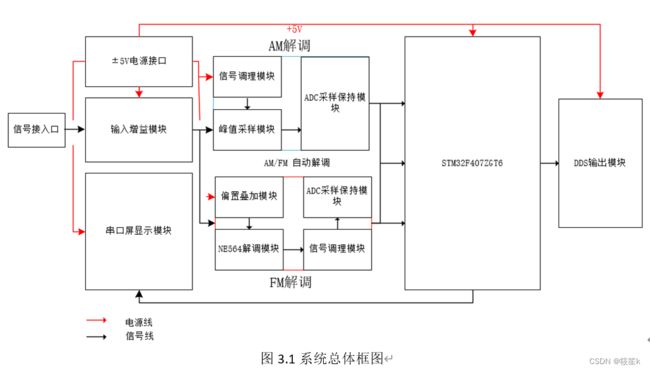
该装置测量并显示信号源输出的被测信号调制度等参数,识别并显示被测信号的调制方式,并且输出解调信号。该装置能实现频率为10MHz到30MHz正弦波为载波的普通单音调幅波、调频波以及载波的识别,测量对应的调幅度以及调频度输出无明显失真的解调信号。
我们采用抽样峰值检测的方法实现AM波的包络还原再重现对应的解调信号,采用带通抽样定律实现FM波的带宽计算调频度,给示波器显示输出部分采用AD9910DDS直接输出。
第三点有些难度,但不至于做不了,不过限于FM解调模块问题,不能实现全带宽的解调(因为需要有电位器微调,而在复测过程中是不允许的,这点也是坑,尽管我们小组已经使用了两块解调模块进行微调:一块店铺购买,一块自制,还是做不全)
理论分析
AM信号处理方案
方案一:
制作峰值采样电路
优点:即使载波的频率在大范围变化改电路采到的峰值任然为包络线,基本不受载波影响adc采集方便控制简单实现方便。
缺点:需要使用模拟开关以及二极管实现峰值采样,需要控制两个模拟开关交替开启,若同时打开电流较大,稍有不慎会烧毁芯片。
方案二:
使用包络检波电路
优点:电路实现简单,元器件少。
缺点:采样时容易受载波频率的影响,在载波增加时幅值会产生较大的衰减。
FM信号处理方案
方案一:
使用NE564模块,将FM波经过放大之后直接使用锁相环解调
优点: 模块适用带宽范围较大,解调后输出波形平滑不失真。
缺点: 若外部输入信号峰峰值太小会导致NE564模块的解调失败或严重自激。
方案二:
采用FPGA数字解调
优点:处理数据能力快,精度高,能够直接获取信号所有信息,对输入信号的峰峰值要求不高。
缺点:解调算法操作难度大,与外部通信实现度差。
FFT快速傅里叶变换与逆变换算法
为了较快检测到输入波形的谐波分量和失真度,本设计采用了FFT快速傅里叶变换算法。
将输入信号分解为泰勒展开式,对信号的奇偶性成两半:
![]()
再令:
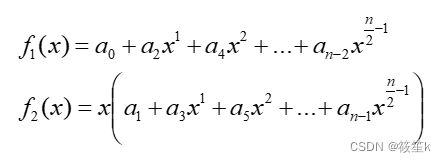
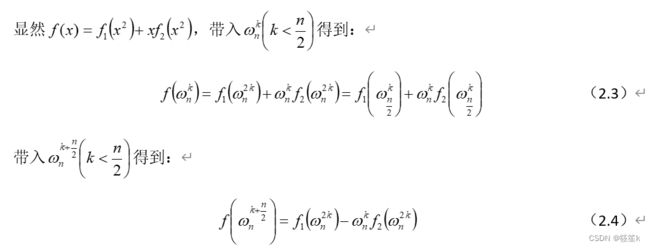
式(2.4)只有一个常数项不同,相比普通傅里叶算法,整个计算量缩小了一半。
在实现FFT时,对于输入频率的分辨率可以表示为采样频率与采样点数之比,如式(2.5)。
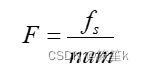
由式(2.5)可知,输入信号基波频率不是分辨率的整数倍,某一频率的能量将会扩散到相邻频率点上,现频谱泄露的问题,既无法检测到基波频率,也无法准确测到幅值。在测量时要先对原信号频率进行测量,然后选择合适的采样频率和采样点进行计算,以此解决频谱泄露的问题。
在FFT结束并相乘后,得到多项式的点值表示,将点表示转化为系数表示,即可完成离散傅里叶逆变换。该过程可以封装表达为式(2.6)。

其中A意义为多项式的系数表示法;B意义为多项式的点值表示法。
在显示单周期波形时,利用快速傅里叶逆变换,用频率信息还原信号,可以突破对ADC采样点与电压值一一对应的依赖,拟合出多点曲线,使显示波形更加平滑。
带通抽样定律采样算法
根据奈奎斯特采样定理,为了能够完整地重建波形,采样至少应为最高频率的2倍。对于信号频率非常高的情况下,一般ADC达不到如此高的速度,所以带通采样能够节省采样频率,频谱将以采样频率为周期向左右两侧进行周期性延拓。
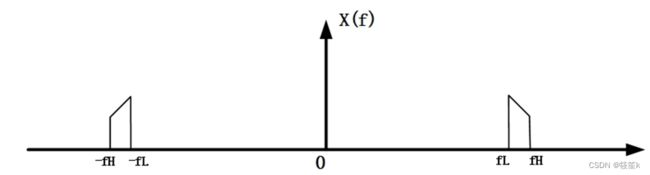
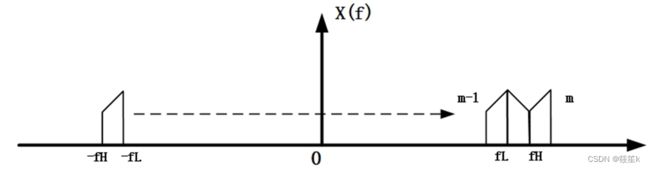
为了使带通采样的信号不发生混叠,因此平移的时候不能原信号发生混叠:
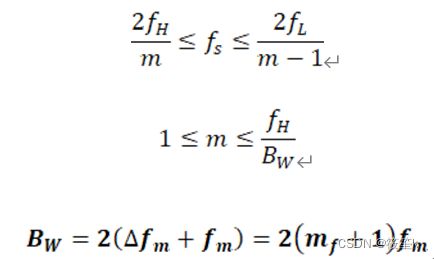
通过确定采样频率经过FFT计算,将带宽求出,利用带宽与调频度和最后频偏的关系式计算出来。
电路设计
程序设计
本题由于要用到大量的数字信号处理以及FFT计算,因此先引入DSP库准没错
注意:不要忘记在Cube界面中Software Packs中将DSP库勾选上,另外要在生成代码界面中勾选导入所有的 .c/ .h文件,以免DSP库导入不全。
其他的Cube配置没什么好说的,开启ADC+TIM+DMA,做到采样率能精准把控,使能DAC(DAC根据方案才使能,由于电路需求一个偏置电压),使能两串口,一个用于调试,一个用于与串口屏通信,另外需要把串口中断开启。
AD9910
/*******************************************************************************
* @file ad9910.h
* @brief ad9910驱动程序
* @version V2.0
* @date 2022-7-23
*
* @note
*
******************************************************************************/
#ifndef __AD9910_H__
#define __AD9910_H__
#include "main.h"
#include "usart.h"
#include "ad9910_RegMap.h"
#define ulong unsigned long int
extern uint8_t cfr2[4]; //cfr2控制字
extern uint8_t cfr1[4]; //cfr1控制字
#define REEST(x) x?HAL_GPIO_WritePin(RST_GPIO_Port,RST_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(RST_GPIO_Port,RST_Pin,GPIO_PIN_RESET) //RST
#define AD9910_PWR(x) x?HAL_GPIO_WritePin(PWR_GPIO_Port,PWR_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(PWR_GPIO_Port,PWR_Pin,GPIO_PIN_RESET) //PWR
#define PROFILE2(x) x?HAL_GPIO_WritePin(PF2_GPIO_Port,PF2_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(PF2_GPIO_Port,PF2_Pin,GPIO_PIN_RESET) //PF2
#define PROFILE1(x) x?HAL_GPIO_WritePin(PF1_GPIO_Port,PF1_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(PF1_GPIO_Port,PF1_Pin,GPIO_PIN_RESET) //PF1
#define PROFILE0(x) x?HAL_GPIO_WritePin(PF0_GPIO_Port,PF0_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(PF0_GPIO_Port,PF0_Pin,GPIO_PIN_RESET) //PF0
#define IOUP(x) x?HAL_GPIO_WritePin(IOUP_GPIO_Port,IOUP_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(IOUP_GPIO_Port,IOUP_Pin,GPIO_PIN_RESET) //IOUP
#define OSK(x) x?HAL_GPIO_WritePin(OSK_GPIO_Port,OSK_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(OSK_GPIO_Port,OSK_Pin,GPIO_PIN_RESET) //OSK
#define DROVER(x) x?HAL_GPIO_WritePin(DRO_GPIO_Port,DRO_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(DRO_GPIO_Port,DRO_Pin,GPIO_PIN_RESET) //DRO
#define DRCTL(x) x?HAL_GPIO_WritePin(DRC_GPIO_Port,DRC_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(DRC_GPIO_Port,DRC_Pin,GPIO_PIN_RESET) //DRC
#define DRHOLD(x) x?HAL_GPIO_WritePin(DRH_GPIO_Port,DRH_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(DRH_GPIO_Port,DRH_Pin,GPIO_PIN_RESET) //DPH
#define AD9910_SDIO(x) x?HAL_GPIO_WritePin(SDIO_GPIO_Port,SDIO_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(SDIO_GPIO_Port,SDIO_Pin,GPIO_PIN_RESET) //SDIO
#define SCLK(x) x?HAL_GPIO_WritePin(SCK_GPIO_Port,SCK_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(SCK_GPIO_Port,SCK_Pin,GPIO_PIN_RESET) //SCK
#define CSB(x) x?HAL_GPIO_WritePin(CSB_GPIO_Port,CSB_Pin,GPIO_PIN_SET):HAL_GPIO_WritePin(CSB_GPIO_Port,CSB_Pin,GPIO_PIN_RESET) //CSB
void Init_AD9910(void);
void Freq_convert(ulong Freq); //写频率
void Amp_convert(uint32_t Amplitude); //写幅度
void Set_cfr(void);
void Set_RAMprofile(void);
void Set_RAMdata(uint8_t wave_num);
void SweepFre(ulong Fre_L, ulong Fre_H, ulong StepFre, ulong SweepTime); //扫频
void Square_wave(uint32_t Sample_interval); //方波;
void Sawtooth_wave(uint32_t Sample_interval); //三角波
void AD9910_Init(void);
void Txd_8bit(uint8_t txData); //ad9910写入的8位数据
void Txd_16bit(uint16_t txData); //ad9910写入的16位数据
void Txd_32bit(uint32_t txData); //ad9910写入的32位数据
void Txd_64bit(uint64_t txData); //ad9910写入的64位数据
void TxCfr(void); //ad9910发送频率值程序
void TxDRG(void); //ad9910发送DRG参数程序
void Freq_convert_firm(uint64_t Freq); //ad9910计算频偏字、频率字和发送程序
void write_Amplitude(uint32_t Amp); //ad9910计算幅度字和发送程序
void SweepFre_firm(uint64_t SweepMinFre, uint64_t SweepMaxFre, uint64_t SweepStepFre, uint64_t SweepTime); //ad9910设置扫频信号
#endif
/*******************************************************************************
* @file ad9910.h
* @brief ad9910驱动程序
* @version V2.0
* @date 2022-7-23
*
* @note
*
******************************************************************************/
#include "ad9910.h"
uint8_t cfr1[] = {0x00, 0x40, 0x00, 0x00}; //cfr1控制字
uint8_t cfr2[] = {0x01, 0x00, 0x00, 0x00}; //cfr2控制字
uint8_t cfr3[] = {0x05, 0x0F, 0x41, 0x32}; //cfr3控制字 40M输入 25倍频 VC0=101 ICP=001;
uint8_t profile11[] = {0x3f, 0xff, 0x00, 0x00, 0x25, 0x09, 0x7b, 0x42}; //profile1控制字 0x25,0x09,0x7b,0x42
//01振幅控制 23相位控制 4567频率调谐字
uint8_t ramprofile0[8] = {0x00}; //ramprofile0控制字
uint8_t drgparameter[20]={0x00};
//高14位幅度控制
const uint8_t ramdata_Square[4096] =
{
//方波
0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00,
0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00,
0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00,
0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00,
0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00,
0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00,
0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00,
0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00, 0xff,0xfc,0x00,0x00,
0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,
};
//高14位幅度控制
const uint8_t ramdata_Sawtooth[4096] =
{
//锯齿波
0x00,0x00,0x00,0x00, 0x03,0xfc,0x00,0x00, 0x07,0xf8,0x00,0x00, 0x0b,0xf4,0x00,0x00,
0x0f,0xf0,0x00,0x00, 0x13,0xec,0x00,0x00, 0x17,0xe8,0x00,0x00, 0x1b,0xe4,0x00,0x00,
0x1f,0xe0,0x00,0x00, 0x23,0xdc,0x00,0x00, 0x27,0xd8,0x00,0x00, 0x2b,0xd4,0x00,0x00,
0x2f,0xd0,0x00,0x00, 0x33,0xcc,0x00,0x00, 0x37,0xc8,0x00,0x00, 0x3b,0xc4,0x00,0x00,
0x3f,0xc0,0x00,0x00, 0x43,0xbc,0x00,0x00, 0x47,0xb8,0x00,0x00, 0x4b,0xb4,0x00,0x00,
0x4f,0xb0,0x00,0x00, 0x53,0xac,0x00,0x00, 0x57,0xa8,0x00,0x00, 0x5b,0xa4,0x00,0x00,
0x5f,0xa0,0x00,0x00, 0x63,0x9c,0x00,0x00, 0x67,0x98,0x00,0x00, 0x6b,0x94,0x00,0x00,
0x6f,0x90,0x00,0x00, 0x73,0x8c,0x00,0x00, 0x77,0x88,0x00,0x00, 0x7b,0x84,0x00,0x00,
0x7f,0x80,0x00,0x00, 0x83,0x7c,0x00,0x00, 0x87,0x78,0x00,0x00, 0x8b,0x74,0x00,0x00,
0x8f,0x70,0x00,0x00, 0x93,0x6c,0x00,0x00, 0x97,0x68,0x00,0x00, 0x9b,0x64,0x00,0x00,
0x9f,0x60,0x00,0x00, 0xa3,0x5c,0x00,0x00, 0xa7,0x58,0x00,0x00, 0xab,0x54,0x00,0x00,
0xaf,0x50,0x00,0x00, 0xb3,0x4c,0x00,0x00, 0xb7,0x48,0x00,0x00, 0xbb,0x44,0x00,0x00,
0xbf,0x40,0x00,0x00, 0xc3,0x3c,0x00,0x00, 0xc7,0x38,0x00,0x00, 0xcb,0x34,0x00,0x00,
0xcf,0x30,0x00,0x00, 0xd3,0x2c,0x00,0x00, 0xd7,0x28,0x00,0x00, 0xdb,0x24,0x00,0x00,
0xdf,0x20,0x00,0x00, 0xe3,0x1c,0x00,0x00, 0xe7,0x18,0x00,0x00, 0xeb,0x14,0x00,0x00,
0xef,0x10,0x00,0x00, 0xf3,0x0c,0x00,0x00, 0xf7,0x08,0x00,0x00, 0xfb,0x04,0x00,0x00,
};
/********************************************************************
* 函数: Set_bit(uint8_t dat)
* 参数: dat: 要发送的数据
* 说明: 发送数据到AD9910
********************************************************************/
static void Set_bit(uint8_t dat)
{
uint8_t i, sbt;
sbt = 0x80;
SCLK(0);
for (i = 0; i < 8; i++)
{
if((dat & sbt) == 0)
AD9910_SDIO(0);
else
AD9910_SDIO(1);
SCLK(1);
sbt = sbt >> 1;
SCLK(0);
}
}
/********************************************************************
* 函数: Set_Control_word(uint16_t Addr, uint8_t *Str)
* 参数: Addr: CFRx控制地址
*Str: CFRx控制字
num: 要发送的控制字数量,即数组长度
* 说明: 写控制字到AD9910寄存器
********************************************************************/
static void Set_Control_word(uint16_t Addr, uint8_t *Str, uint16_t num)
{
uint8_t i = 0;
CSB(0);
Set_bit(Addr);
for(i=0; i<num; i++)
Set_bit( *(Str + i) );
CSB(1);
HAL_Delay_us(10);
}
/********************************************************************
* 函数: Set_cfr(void)
* 参数: 无
* 说明: 发送CFRx控制字
********************************************************************/
void Set_cfr(void)
{
Set_Control_word(0x00, cfr1, 4);//写CFR
Set_Control_word(0x01, cfr2, 4);
Set_Control_word(0x02, cfr3, 4);
IOUP(1);
HAL_Delay_us(10);
IOUP(0);
HAL_Delay(1);
}
/********************************************************************
* 函数: Init_AD9910(void)
* 参数: 无
* 说明: AD9910 初始化
********************************************************************/
void Init_AD9910(void)
{
AD9910_PWR(0); //软件拉低
PROFILE0(0);
PROFILE1(0);
PROFILE2(0);
DRCTL(0);
DRHOLD(0);
REEST(1);
HAL_Delay(5);
REEST(0);
}
/********************************************************************
* 函数: Set_prodile0(void)
* 参数: 无
* 说明: AD9910 发送profile0控制字
********************************************************************/
static void Set_prodile0(void)
{
Set_Control_word(0x0e, profile11, 8);//写profile0控制字
IOUP(1);
IOUP(0);
}
/********************************************************************
* 函数: Freq_convert(ulong Freq)
* 参数: Freq: 频率
* 说明: 计算频偏字、频率字
********************************************************************/
void Freq_convert(ulong Freq)
{
ulong Temp;
Temp = (ulong)Freq * 4.294967296 * 1.4285714286; //将输入频率因子分为四个字节 4.294967296=(2^32)/1000000000
profile11[7] = (uint8_t)Temp;
profile11[6] = (uint8_t)(Temp >> 8);
profile11[5] = (uint8_t)(Temp >> 16);
profile11[4] = (uint8_t)(Temp >> 24);
Set_prodile0();
}
/********************************************************************
* 函数: Amp_convert(uint32_t Amp)
* 参数: Amp: 幅值
* 说明: 计算幅值
********************************************************************/
void Amp_convert(uint32_t Amp)
{
ulong Temp;
Temp = (ulong)(Amp * 21.84533); //将输入幅度因子分为两个字节 21.84533=(2^14)/750
if (Temp > 0x3fff)
Temp = 0x3fff;
Temp &= 0x3fff;
profile11[1] = (uint8_t)Temp;
profile11[0] = (uint8_t)(Temp >> 8);
Set_prodile0();
}
/********************************************************************
* 函数: Set_DRG(void)
* 参数: 无
* 说明: 发送DRG参数
********************************************************************/
static void Set_DRG(void)
{
Set_Control_word(0x0b, drgparameter,8);
Set_Control_word(0x0c, drgparameter+8,8);
Set_Control_word(0x0c, drgparameter+16,4);
IOUP(1);
HAL_Delay_us(10);
IOUP(0);
HAL_Delay(1);
}
/********************************************************************
* 函数: SweepFre(ulong Fre_L, ulong Fre_H, ulong StepFre, ulong SweepTime)
* 参数: Fre_L: 扫频最低频率 Hz
Fre_H: 设置扫频上限频率 Hz
StepFre: 设置步进频率 Hz
SweepTime: 设置步进时间间隔 us
* 说明: 扫频参数设置
********************************************************************/
void SweepFre(ulong Fre_L, ulong Fre_H, ulong StepFre, ulong SweepTime)
{
ulong Temp1, Temp2, ITemp3, DTemp3, ITemp4, DTemp4;
Temp1 = (ulong)Fre_L*4.294967296;
if(Fre_H > 400000000)
Fre_H = 400000000;
Temp2 = (ulong)Fre_H*4.294967296;
if(StepFre > 400000000)
StepFre = 400000000;
ITemp3 = (ulong)StepFre*4.294967296;
DTemp3 = ITemp3;
ITemp4 = (ulong)SweepTime/4; //1GHz/4, 单位:ns
if(ITemp4 > 0xffff)
ITemp4 = 0xffff;
DTemp4 = ITemp4;
//扫频上下限
drgparameter[7]=(uint8_t)Temp1;
drgparameter[6]=(uint8_t)(Temp1>>8);
drgparameter[5]=(uint8_t)(Temp1>>16);
drgparameter[4]=(uint8_t)(Temp1>>24);
drgparameter[3]=(uint8_t)Temp2;
drgparameter[2]=(uint8_t)(Temp2>>8);
drgparameter[1]=(uint8_t)(Temp2>>16);
drgparameter[0]=(uint8_t)(Temp2>>24);
//频率步进(单位:Hz)
drgparameter[15]=(uint8_t)ITemp3;
drgparameter[14]=(uint8_t)(ITemp3>>8);
drgparameter[13]=(uint8_t)(ITemp3>>16);
drgparameter[12]=(uint8_t)(ITemp3>>24);
drgparameter[11]=(uint8_t)DTemp3;
drgparameter[10]=(uint8_t)(DTemp3>>8);
drgparameter[9]=(uint8_t)(DTemp3>>16);
drgparameter[8]=(uint8_t)(DTemp3>>24);
//步进时间间隔(单位:us)
drgparameter[19]=(uint8_t)ITemp4;
drgparameter[18]=(uint8_t)(ITemp4>>8);
drgparameter[17]=(uint8_t)DTemp4;
drgparameter[16]=(uint8_t)(DTemp4>>8);
//发送DRG参数
Set_DRG();
cfr1[0] = 0x00; //RAM 失能
cfr2[1] = 0x0e; //DRG 使能
Set_cfr(); //发送cfrx控制字
}
/********************************************************************
* 函数: Set_RAMprofile(void)
* 参数: 无
* 说明: 发送RAM profile0控制字
********************************************************************/
void Set_RAMprofile(void)
{
Set_Control_word(0x0e, ramprofile0, 8);//发送RAM profile0控制字
IOUP(1);
HAL_Delay_us(10);
IOUP(0);
HAL_Delay(1);
}
/********************************************************************
* 函数: Set_RAMdata(int wave_num)
* 参数: wave_num: 输出选择,1方波,0锯齿波
* 说明: 发送RAM控制字
********************************************************************/
void Set_RAMdata(uint8_t wave_num)
{
if(wave_num==1)
{
uint16_t m = 0;
CSB(0);
Set_bit(0x16); //发送ram控制字地址
for (m=0; m<4096; m++)
Set_bit(ramdata_Square[m]);
CSB(1);
HAL_Delay_us(10);
IOUP(1);
HAL_Delay_us(10);
IOUP(0);
HAL_Delay(1);
}
else
{
uint16_t m = 0;
CSB(0);
Set_bit(0x16); //发送ram控制字地址
for (m=0; m<4096; m++)
Set_bit(ramdata_Sawtooth[m]);
CSB(1);
HAL_Delay_us(10);
IOUP(1);
HAL_Delay_us(10);
IOUP(0);
HAL_Delay(1);
}
}
/********************************************************************
* 函数: Square_wave(uint32_t Sample_interval)
* 参数: Sample_interval: 采样频率
* 说明: 产生方波
********************************************************************/
void Square_wave(uint32_t Sample_interval)
{
ulong Temp;
//1GHz/4, 采样间隔范围:4*(1~65536)ns
Temp = ((1000000000/(unsigned long int)(Sample_interval)/64/4));
if(Temp > 0xffff)
Temp = 0xffff;
ramprofile0[7] = 0x24;
ramprofile0[6] = 0x00;
ramprofile0[5] = 0x00;
ramprofile0[4] = 0xc0;
ramprofile0[3] = 0x0f;
ramprofile0[2] = (uint8_t)Temp;
ramprofile0[1] = (uint8_t)(Temp>>8);
ramprofile0[0] = 0x00;
Set_RAMprofile();
Set_RAMdata(1);
cfr1[0] = 0xc0; //RAM 使能,幅度控制
cfr2[1] = 0x00; //DRG 失能
Set_cfr(); //发送cfrx控制字
}
/********************************************************************
* 函数: Sawtooth_wave(uint32_t Sample_interval)
* 参数: Sample_interval: 采样频率
* 说明: 产生锯齿波
********************************************************************/
void Sawtooth_wave(uint32_t Sample_interval)
{
ulong Temp;
//1GHz/4, 采样间隔范围:4*(1~65536)ns
Temp = ((1000000000/(unsigned long int)(Sample_interval)/64/4));
if(Temp > 0xffff)
Temp = 0xffff;
ramprofile0[7] = 0x24;
ramprofile0[6] = 0x00;
ramprofile0[5] = 0x00;
ramprofile0[4] = 0xc0;
ramprofile0[3] = 0x0f;
ramprofile0[2] = (uint8_t)Temp;
ramprofile0[1] = (uint8_t)(Temp>>8);
ramprofile0[0] = 0x00;
Set_RAMprofile();
Set_RAMdata(0);
cfr1[0] = 0xc0; //RAM 使能,幅度控制
cfr2[1] = 0x00; //DRG 失能
Set_cfr(); //发送cfrx控制字
}
/* ======================================================================================================================================= */
/**
* @brief ad9910写入的8位数据(地址)
* @param txData 写入的8位数据(地址)
* @return none
* @note 寄存器地址,单个字节操作
*/
void Txd_8bit(uint8_t txData)
{
uint8_t i,dat;
dat=0x80;
SCLK(0);
for(i=0;i<8;i++)
{
if((txData&dat)==0)
AD9910_SDIO(0);
else
AD9910_SDIO(1);
SCLK(1);
dat>>=1;
SCLK(0);
}
}
/**
* @brief ad9910发送频率值程序
* @param none
* @return none
* @note
*/
void TxCfr(void)
{
uint8_t i;
CSB(0);
Txd_8bit(regControlSFMProfile0);
for(i=0;i<8;i++)
Txd_8bit(profile11[i]);
CSB(1);
IOUP(1);
HAL_Delay(1);
IOUP(0);
}
/**
* @brief ad9910计算频偏字、频率字和发送程序
* @param Freq 填入的频率值
* @return none
* @note
*/
void Freq_convert_firm(uint64_t Freq)
{
uint64_t Temp;
Temp=(uint64_t)Freq*4.294967296; //将输入频率因子分为四个字节 4.294967296=(2^32)/1000000000
Temp=Temp*1.44;
profile11[7]=(uint8_t)Temp;
profile11[6]=(uint8_t)(Temp>>8);
profile11[5]=(uint8_t)(Temp>>16);
profile11[4]=(uint8_t)(Temp>>24);
TxCfr();
}
/**
* @brief ad9910计算幅度字和发送程序
* @param Amp 幅度字
* @return none
* @note
*/
void write_Amplitude(uint32_t Amp)
{
uint64_t temp;
temp = (uint64_t)Amp * 25.20615385;//将输入幅度因子分为两个字节,25.20615385 = 2^14/650;
if(temp > 0x3fff)
temp = 0x3fff;
temp &= 0x3fff;
profile11[1] = (uint8_t)temp;
profile11[0] = (uint8_t)(temp >> 8);
TxCfr();
}
/**
* @brief ad9910设置扫频信号
* @param Amp 幅度字
* @return none
* @note
*/
void SweepFre_firm(uint64_t SweepMinFre, uint64_t SweepMaxFre, uint64_t SweepStepFre, uint64_t SweepTime)
{
uint64_t Temp1, Temp2, ITemp3, DTemp3, ITemp4, DTemp4;
Temp1 = (uint64_t)SweepMinFre*4.294967296;
if(SweepMaxFre > 400000000)
SweepMaxFre = 400000000;
Temp2 = (uint64_t)SweepMaxFre*4.294967296;
if(SweepStepFre > 400000000)
SweepStepFre = 400000000;
ITemp3 = (uint64_t)SweepStepFre*4.294967296;
DTemp3 = ITemp3;
ITemp4 = (uint64_t)SweepTime/4; //1GHz/4, 单位:ns
if(ITemp4 > 0xffff)
ITemp4 = 0xffff;
DTemp4 = ITemp4;
//扫频上下限
drgparameter[7]=(uint8_t)Temp1;
drgparameter[6]=(uint8_t)(Temp1>>8);
drgparameter[5]=(uint8_t)(Temp1>>16);
drgparameter[4]=(uint8_t)(Temp1>>24);
drgparameter[3]=(uint8_t)Temp2;
drgparameter[2]=(uint8_t)(Temp2>>8);
drgparameter[1]=(uint8_t)(Temp2>>16);
drgparameter[0]=(uint8_t)(Temp2>>24);
//频率步进(单位:Hz)
drgparameter[15]=(uint8_t)ITemp3;
drgparameter[14]=(uint8_t)(ITemp3>>8);
drgparameter[13]=(uint8_t)(ITemp3>>16);
drgparameter[12]=(uint8_t)(ITemp3>>24);
drgparameter[11]=(uint8_t)DTemp3;
drgparameter[10]=(uint8_t)(DTemp3>>8);
drgparameter[9]=(uint8_t)(DTemp3>>16);
drgparameter[8]=(uint8_t)(DTemp3>>24);
//步进时间间隔(单位:us)
drgparameter[19]=(uint8_t)ITemp4;
drgparameter[18]=(uint8_t)(ITemp4>>8);
drgparameter[17]=(uint8_t)DTemp4;
drgparameter[16]=(uint8_t)(DTemp4>>8);
//发送DRG参数
TxDRG();
}
/**
* @brief ad9910发送DRG参数程序
* @param none
* @return none
* @note
*/
void TxDRG(void)
{
uint8_t m,k;
CSB(0);
Txd_8bit(0x0b); //发送数字斜坡限制地址0x0b
for (m=0;m<8;m++)
Txd_8bit(drgparameter[m]);
CSB(1);
for(k=0;k<10;k++);
CSB(0);
Txd_8bit(0x0c); //发送数字斜坡步长地址0x0c
for (m=8;m<16;m++)
Txd_8bit(drgparameter[m]);
CSB(1);
for(k=0;k<10;k++);
CSB(0);
Txd_8bit(0x0d); //发送数字斜坡速率地址0x0d
for (m=16;m<20;m++)
Txd_8bit(drgparameter[m]);
CSB(1);
for(k=0;k<10;k++);
IOUP(1);
for(k=0;k<10;k++);
IOUP(0);
HAL_Delay(1);
}
static void AD9910_GPIO_Config(void)
{
REEST(0);
}
static void AD9910_CFR_Config(void)
{
uint8_t k,m;
AD9910_GPIO_Config(); //IO口初始化
AD9910_PWR(0);
PROFILE0(0); PROFILE1(0); PROFILE2(0);
DRHOLD(0); DRCTL(0);
REEST(1); HAL_Delay(5); REEST(0);
CSB(0);
Txd_8bit(regControlCFR1);
for(m=0;m<4;m++)
Txd_8bit(cfr1[m]);
CSB(1);
for (k=0;k<10;k++);
CSB(0);
Txd_8bit(regControlCFR2);
for(m=0;m<4;m++)
Txd_8bit(cfr2[m]);
CSB(1);
for (k=0;k<10;k++);
CSB(0);
Txd_8bit(regControlCFR3);
for(m=0;m<4;m++)
Txd_8bit(cfr3[m]);
CSB(1);
for (k=0;k<10;k++);
IOUP(1);
for(k=0;k<10;k++);
IOUP(0);
HAL_Delay(1);
}
void AD9910_Init(void)
{
AD9910_CFR_Config();
}
/**
* @brief ad9910写入的16位数据
* @param txData 写入的16位数据
* @return none
* @note POW寄存器操作,双位字节操作
*/
void Txd_16bit(uint16_t txData)
{
uint8_t i;
uint16_t dat;
dat=0x8000;
SCLK(0);
for(i=0;i<16;i++)
{
if((txData&dat)==0)
AD9910_SDIO(0);
else
AD9910_SDIO(1);
SCLK(1);
dat>>=1;
SCLK(0);
}
}
/**
* @brief ad9910写入的32位数据
* @param txData 写入的32位数据
* @return none
* @note 对CFR1~3、DAC、IO更新速率、FTW、ASF、多芯片同步、斜坡速率、RAM操作
*/
void Txd_32bit(uint32_t txData)
{
uint8_t i;
uint32_t dat;
dat=0x80000000;
SCLK(0);
for(i=0;i<32;i++)
{
if((txData&dat)==0)
AD9910_SDIO(0);
else
AD9910_SDIO(1);
SCLK(1);
dat>>=1;
SCLK(0);
}
}
/**
* @brief ad9910写入的64位数据
* @param txData 写入的64位数据
* @return none
* @note 对斜坡限值、斜坡步长、Profile0~7(单频调制、RAM)操作
*/
void Txd_64bit(uint64_t txData)
{
uint8_t i;
uint64_t dat;
dat=0x8000000000000000;
SCLK(0);
for(i=0;i<64;i++)
{
if((txData&dat)==0)
AD9910_SDIO(0);
else
AD9910_SDIO(1);
SCLK(1);
dat>>=1;
SCLK(0);
}
}
ADS8885
/*******************************************************************************
* @file ads8885.h
* @brief ads8885驱动头文件
* @version V1.0
* @date 2021-10-27
*
* @note
*
******************************************************************************/
#ifndef __ADS_8885_H
#define __ADS_8885_H
#include "main.h"
//#include "spi.h"
#include "soft_spi.h"
#include "gpio.h"
#include "usart.h"
extern enum { Wire3Soft_1=0,
Wire3Soft_2,
Wire4Soft_1,
Wire4Soft_2} mode;
#define CTL_H HAL_GPIO_WritePin(CTL_GPIO_Port, CTL_Pin, GPIO_PIN_SET)
#define CTL_L HAL_GPIO_WritePin(CTL_GPIO_Port, CTL_Pin, GPIO_PIN_RESET)
//#define DIN_H HAL_GPIO_WritePin(DIN_GPIO_Port, DIN_Pin, GPIO_PIN_SET)
//#define DIN_L HAL_GPIO_WritePin(DIN_GPIO_Port, DIN_Pin, GPIO_PIN_RESET)
#define CONVST_H HAL_GPIO_WritePin(CONVST_GPIO_Port, CONVST_Pin, GPIO_PIN_SET)
#define CONVST_L HAL_GPIO_WritePin(CONVST_GPIO_Port, CONVST_Pin, GPIO_PIN_RESET)
//uint32_t getData_3Wire(void);
uint32_t getData_3WireSoft(void);
uint32_t getData_4WireSoft(void);
double TansformData(uint8_t mode);
void getRData(float *data, int Avg);
/* 第二块ADS8885 */
#define CTL2_H HAL_GPIO_WritePin(CTL2_GPIO_Port, CTL2_Pin, GPIO_PIN_SET)
#define CTL2_L HAL_GPIO_WritePin(CTL2_GPIO_Port, CTL2_Pin, GPIO_PIN_RESET)
#define CVST2_H HAL_GPIO_WritePin(CVST2_GPIO_Port, CVST2_Pin, GPIO_PIN_SET)
#define CVST2_L HAL_GPIO_WritePin(CVST2_GPIO_Port, CVST2_Pin, GPIO_PIN_RESET)
uint32_t getData2_3WireSoft(void);
double TansformData_2ADS(uint8_t mode);
void getRData_2ADS(float *data, int Avg);
#endif
#ifndef __SOFT_SPI_H
#define __SOFT_SPI_H
#include "main.h"
#include "gpio.h"
#include "usart.h"
#define MOSI_H HAL_GPIO_WritePin(MOSI_GPIO_Port, MOSI_Pin, GPIO_PIN_SET)
#define MOSI_L HAL_GPIO_WritePin(MOSI_GPIO_Port, MOSI_Pin, GPIO_PIN_RESET)
#define SCLK_H HAL_GPIO_WritePin(SCLK_GPIO_Port, SCLK_Pin, GPIO_PIN_SET)
#define SCLK_L HAL_GPIO_WritePin(SCLK_GPIO_Port, SCLK_Pin, GPIO_PIN_RESET)
#define MISO HAL_GPIO_ReadPin(MISO_GPIO_Port, MISO_Pin)
/* CPOL = 0, CPHA = 0, MSB first MODE0*/
uint8_t SOFT_SPI_RW_MODE0( uint8_t write_dat );
uint8_t SPI_Receiver_MODE0(void);
/* CPOL=0,CPHA=1, MSB first MODE1*/
uint8_t SOFT_SPI_RW_MODE1(uint8_t byte) ;
uint8_t SPI_Receiver_MODE1(void);
uint32_t SPI_Re_18Data(void);
/* CPOL=1,CPHA=0, MSB first MODE2*/
uint8_t SOFT_SPI_RW_MODE2(uint8_t byte) ;
uint8_t SPI_Receiver_MODE2(void);
/* CPOL = 1, CPHA = 1, MSB first MODE3*/
uint8_t SOFT_SPI_RW_MODE3( uint8_t write_dat );
uint8_t SPI_Receiver_MODE3(void);
/* 第二块ADS8885 */
#define MOSI2_H HAL_GPIO_WritePin(MOSI2_GPIO_Port, MOSI2_Pin, GPIO_PIN_SET)
#define MOSI2_L HAL_GPIO_WritePin(MOSI2_GPIO_Port, MOSI2_Pin, GPIO_PIN_RESET)
#define SCLK2_H HAL_GPIO_WritePin(SCLK2_GPIO_Port, SCLK2_Pin, GPIO_PIN_SET)
#define SCLK2_L HAL_GPIO_WritePin(SCLK2_GPIO_Port, SCLK2_Pin, GPIO_PIN_RESET)
#define MISO2 HAL_GPIO_ReadPin(MISO2_GPIO_Port, MISO2_Pin)
uint32_t SPI2_Re_18Data(void);
#endif
/*******************************************************************************
* @file ads8885.c
* @brief ads8885
* @version V1.0
* @date 2021-10-27
*
* @note
*
******************************************************************************/
#include "ads8885.h"
/*ADS8885 三线操作*/
uint32_t getData_3WireSoft(void)
{
uint32_t data;
CTL_L;
CONVST_H;
HAL_Delay_us(1);
CONVST_L;
data = SPI_Re_18Data();
CONVST_H;
CTL_H;
return data;
}
uint32_t getData2_3WireSoft(void)
{
uint32_t data;
CTL2_L;
CVST2_H;
HAL_Delay_us(1);
CVST2_L;
data = SPI2_Re_18Data();
CVST2_H;
CTL2_H;
return data;
}
/*ADS8885 四线操作*/
/*
uint32_t getData_4WireSoft(void)
{
uint32_t data;
CTL_L;
DIN_H;
CONVST_H;
HAL_Delay_us(1);
DIN_L;
data = SPI_Re_18Data();
DIN_H;
CONVST_L;
CONVST_H;
return data;
}
*/
double TansformData(uint8_t mode)
{
double transdata;
uint32_t data;
// if(mode == Wire3Soft_1)
// {
// data = getData_3WireSoft()+105;
data = getData_3WireSoft();
if(data & 0x20000)
{
transdata = ((double)(data&0x1ffff)*4.096)/131071;
if(transdata > 8)
return 0;
return transdata-4.096;
}
else
{
transdata = ((double)data*4.096)/131071;
if(transdata > 8)
return 0;
return transdata;
}
return 0;
}
void getRData(float *data, int Avg)
{
for(int i=0;i<Avg;i++)
{
data[i] = TansformData(Wire3Soft_1);
// HAL_Delay_us(1);
}
}
/* 第二块ADS8885 */
double TansformData_2ADS(uint8_t mode)
{
double transdata;
uint32_t data;
data = getData2_3WireSoft();
if(data & 0x20000)
{
transdata = ((double)(data&0x1ffff)*4.096)/131071;
if(transdata > 8)
return 0;
return transdata-4.096;
}
else
{
transdata = ((double)data*4.096)/131071;
if(transdata > 8)
return 0;
return transdata;
}
return 0;
}
void getRData_2ADS(float *data, int Avg)
{
for(int i=0;i<Avg;i++)
{
data[i] = TansformData_2ADS(Wire3Soft_1);
}
}
#if 0 //硬件SPI
uint32_t getData_3Wire(void)
{
uint32_t data;
uint8_t dat[3]={0};
HAL_GPIO_WritePin(CTL_GPIO_Port,CTL_Pin,GPIO_PIN_SET); //拉低CTL引脚,保持电平
HAL_GPIO_WritePin(CONVST_GPIO_Port,CONVST_Pin,GPIO_PIN_SET);
HAL_Delay_us(1);
HAL_GPIO_WritePin(CONVST_GPIO_Port,CONVST_Pin,GPIO_PIN_RESET);
if(HAL_SPI_Receive(&hspi3,(uint8_t*)dat,3,0xff) == HAL_OK)
{
data = ((dat[0]<<16) | (dat[1]<<8) | dat[2]);
}
HAL_GPIO_WritePin(CTL_GPIO_Port,CTL_Pin,GPIO_PIN_RESET); //拉高CTL引脚,进行下一次转换
HAL_Delay_us(1);
return data;
}
#endif
#include "soft_spi.h"
/*********************************************
模式零 读数据
*********************************************/
/* CPOL = 0, CPHA = 0, MSB first MODE0*/
uint8_t SOFT_SPI_RW_MODE0( uint8_t write_dat )
{
uint8_t i, read_dat;
for( i = 0; i < 8; i++ )
{
if( write_dat & 0x80 )
MOSI_H;
else
MOSI_L;
write_dat <<= 1;
HAL_Delay_us(1);
SCLK_H;
read_dat <<= 1;
if( MISO )
read_dat++;
HAL_Delay_us(1);
SCLK_L;
__nop();
}
return read_dat;
}
uint8_t SPI_Receiver_MODE0(void)
{
uint8_t n ,dat;
for(n=0;n<8;n++)
{
SCLK_L;
dat<<=1;
if(MISO) //读取电平
dat|=0x01;
else
dat&=0xfe;
SCLK_H;
}
SCLK_L;
return dat;
}
/*********************************************
模式一 读数据
*********************************************/
/* CPOL=0,CPHA=1, MSB first MODE1*/
uint8_t SOFT_SPI_RW_MODE1(uint8_t byte)
{
uint8_t i,Temp=0;
for(i=0;i<8;i++) // 循环8次
{
SCLK_H; //拉高时钟
if(byte&0x80)
{
MOSI_H; //若最到位为高,则输出高
}
else
{
MOSI_L; //若最到位为低,则输出低
}
byte <<= 1; // 低一位移位到最高位
HAL_Delay_us(1);
SCLK_L; //拉低时钟
Temp <<= 1; //数据左移
if(MISO)
Temp++; //若从从机接收到高电平,数据自加一
HAL_Delay_us(1);
}
return (Temp); //返回数据
}
uint8_t SPI_Receiver_MODE1(void)
{
uint8_t n ,dat=0;
for(n=0;n<8;n++)
{
SCLK_H;
dat<<=1;
if(MISO)
dat|=0x01;
else
dat&=0xfe;
SCLK_L;
}
SCLK_L;
return dat;
}
uint32_t SPI_Re_18Data(void)
{
uint8_t n ;
uint32_t dat=0;
for(n=0;n<18;n++)
{
#if 1
SCLK_H;
dat<<=1;
if(MISO)
dat|=0x00001;
else
dat&=0x3ffff;
SCLK_L;
}
SCLK_L;
dat = (~dat) & (0x3ffff);
#endif
return dat;
}
uint32_t SPI2_Re_18Data(void)
{
uint8_t n ;
uint32_t dat=0;
for(n=0;n<18;n++)
{
#if 1
SCLK2_H;
dat<<=1;
if(MISO2)
dat|=0x00001;
else
dat&=0x3ffff;
SCLK2_L;
}
SCLK2_L;
dat = (~dat) & (0x3ffff);
#endif
return dat;
}
/*********************************************
模式二 读数据
*********************************************/
/* CPOL=1,CPHA=0, MSB first MODE2*/
uint8_t SOFT_SPI_RW_MODE2(uint8_t byte)
{
uint8_t i,Temp=0;
for(i=0;i<8;i++) // 循环8次
{
if(byte&0x80)
{
MOSI_H; //若最到位为高,则输出高
}
else
{
MOSI_L; //若最到位为低,则输出低
}
byte <<= 1; // 低一位移位到最高位
HAL_Delay_us(1);
SCLK_L; //拉低时钟
Temp <<= 1; //数据左移
if(MISO)
Temp++; //若从从机接收到高电平,数据自加一
HAL_Delay_us(1);
SCLK_H; //拉高时钟
}
return (Temp); //返回数据
}
uint8_t SPI_Receiver_MODE2(void)
{
uint8_t n ,dat;
for(n=0;n<8;n++)
{
SCLK_H;
dat<<=1;
if(MISO)
dat|=0x01;
else
dat&=0xfe;
SCLK_L;
}
SCLK_L;
return dat;
}
/************************************
模式三 读数据
************************************/
/* CPOL = 1, CPHA = 1, MSB first MODE3*/
uint8_t SOFT_SPI_RW_MODE3( uint8_t write_dat )
{
uint8_t i, read_dat;
for( i = 0; i < 8; i++ )
{
SCLK_L;
if( write_dat & 0x80 )
MOSI_H;
else
MOSI_L;
write_dat <<= 1;
HAL_Delay_us(1);
SCLK_H;
read_dat <<= 1;
if( MISO )
read_dat++;
HAL_Delay_us(1);
__nop();
}
return read_dat;
}
uint8_t SPI_Receiver_MODE3(void)
{
uint8_t n ,dat;
SCLK_L;
for(n=0;n<8;n++)
{
SCLK_L;
dat<<=1;
if(MISO)
dat|=0x01;
else
dat&=0xfe;
SCLK_H;
}
SCLK_H;
return dat;
}
注意:由于是使用了两块ADS8885分别对AM和FM两路解调信号进行采样,采到的数据经过加窗,FFT处理,可以得到解调信号的频率
加窗函数
/*
*file WindowFunction.h
*author Vincent Cui
*e-mail [email protected]
*version 0.3
*data 31-Oct-2014
*brief 各种窗函数的C语言实现
*/
#ifndef _WINDOWFUNCTION_H_
#define _WINDOWFUNCTION_H_
#include /*
*file WindowFunction.c
*author Vincent Cui
*e-mail [email protected]
*version 0.3
*data 31-Oct-2014
*brief 各种窗函数的C语言实现
*/
#include "winfun.h"
#include 卡尔曼滤波
#include "kalman.h"
/**
*卡尔曼滤波器
*@param Kalman *kfp 卡尔曼结构体参数
* float input 需要滤波的参数的测量值(即传感器的采集值)
*@return 滤波后的参数(最优值)
*/
float KalmanFilter(float inData)
{
static float prevData = 0; //上一个数据
static float p = 10, q = 0.001, r = 0.001, kGain = 0; // q 控制误差 r 控制响应速度
p = p + q;
kGain = p / ( p + r ); //计算卡尔曼增益
inData = prevData + ( kGain * ( inData - prevData ) ); //计算本次滤波估计值
p = ( 1 - kGain ) * p; //更新测量方差
prevData = inData;
return inData; //返回估计值
}
/* 优化后的卡尔曼滤波
更改Q值,响应加快,但太大会有震荡
更改R值,响应减慢,越大稳定性会提高,但时间会增加
*/
unsigned long kalman_filter( unsigned long ADC_Value )
{
float LastData;
float NowData;
float kalman_adc;
static float kalman_adc_old = 0;
static float PP;
static float Q = 0.5;
static float R = 10;
static float Kg = 0;
static float P = 1;
NowData = ADC_Value;
LastData = kalman_adc_old;
P = PP + Q;
Kg = P / ( P + R );
kalman_adc = LastData + Kg * ( NowData - kalman_adc_old );
PP = ( 1 - Kg ) * P;
P = PP;
kalman_adc_old = kalman_adc;
return ( unsigned long )( kalman_adc );
}
/* 优化后的卡尔曼滤波
更改Q值,响应加快,但太大会有震荡
更改R值,响应减慢,越大稳定性会提高,但时间会增加
*/
float kalman_filter_FPU( float Val )
{
float LastData;
float NowData;
float kalman_adc;
static float kalman_adc_old = 1.0;
static float PP;
static float Q = 0.5;
static float R = 10;
static float Kg = 0;
static float P = 1;
NowData = Val;
LastData = kalman_adc_old;
P = PP + Q;
Kg = P / ( P + R );
kalman_adc = LastData + Kg * ( NowData - kalman_adc_old );
PP = ( 1 - Kg ) * P;
P = PP;
kalman_adc_old = kalman_adc;
return ( kalman_adc );
}
主要程序
FFT的计算
void FFT_Caculate(uint16_t *adc_buf, uint16_t FFT)
{
for(int i = 0; i < FFT; i++)
{
fft_inputbuf[2*i]=adc_buf[i] * 3.3 / 4096; //实部
fft_inputbuf[2*i+1]=0;//虚部全部为0
}
arm_cfft_f32(&arm_cfft_sR_f32_len1024,fft_inputbuf,0,1);
arm_cmplx_mag_f32(fft_inputbuf,fft_outputbuf,FFT); //把运算结果复数求模得幅值
fft_outputbuf[0] /= FFT;
for(int i = 1; i < FFT/2 ;i++)
{
fft_outputbuf[i] /= (FFT/2);
}
for(int i=0;i<FFT/2;i++)
{
printf("%f\n",fft_outputbuf[i]);
}
}
void FFT_Caculate_NonePrint(uint16_t *adc_buf, uint16_t FFT)
{
for(int i = 0; i < FFT; i++)
{
fft_inputbuf[2*i]=adc_buf[i] * 3.3 / 4096; //实部
fft_inputbuf[2*i+1]=0;//虚部全部为0
}
arm_cfft_f32(&arm_cfft_sR_f32_len1024,fft_inputbuf,0,1);
arm_cmplx_mag_f32(fft_inputbuf,fft_outputbuf,FFT); //把运算结果复数求模得幅值
fft_outputbuf[0] /= FFT;
for(int i = 1; i < FFT/2 ;i++)
{
fft_outputbuf[i] /= (FFT/2);
}
}
unsigned long FFT_Caculate_Float(float *adc_8885_buf, uint16_t FFT)
{
unsigned long dds_fre;
float c_fre=0,m_fre;
int temp_i;
for(int i=0;i<FFT;i++)
{
fft_inputbuf[2*i]=adc_8885_buf[i]; //实部
fft_inputbuf[2*i+1]=0;//虚部全部为0
}
arm_cfft_f32(&arm_cfft_sR_f32_len1024,fft_inputbuf,0,1);
arm_cmplx_mag_f32(fft_inputbuf,fft_outputbuf,FFT_LENGTH); //把运算结果复数求模得幅值
for(int i=0;i<FFT_LENGTH/2;i++)
{
if(fft_outputbuf[i]>c_fre){
c_fre=fft_outputbuf[i];
temp_i = i;
}
}
m_fre = (float)ADS8885_CLK/1024.0 * temp_i; //基带频率
dds_fre = (unsigned long)((m_fre/1000)+1)*1000; //把频率给DDS
return dds_fre;
}
ADS8885计算频率和幅度
void ADS8885_Calculat_Fre(double *fre)
{
int temp_ii=0;
float cmp_fre=0;
getRData(adc8885_val,FFT_LENGTH);
for(int i = 0; i < FFT_LENGTH; i++)
{
fft_inputbuf[2*i]=adc8885_val[i];
fft_inputbuf[2*i+1]=0;//虚部全部为0
}
arm_cfft_f32(&arm_cfft_sR_f32_len1024,fft_inputbuf,0,1);
arm_cmplx_mag_f32(fft_inputbuf,fft_outputbuf,FFT_LENGTH); //把运算结果复数求模得幅值
for(int i=10;i<FFT_LENGTH/2;i++)
{
if(fft_outputbuf[i]>cmp_fre){
cmp_fre=fft_outputbuf[i];
temp_ii = i;
}
}
*fre = (float)ADS8885_CLK/1024.0 * temp_ii;
*fre = (float)((int)(*fre/1000)+1)*1000;
}
void ADS8885_Calculat_Amg(float *adc8885_avgs)
{
float adc8885_minval = 5.0;
float adc8885_maxval = -5.0;
for(int k=0;k<10;k++)
{
getRData(adc8885_val,FFT_LENGTH);
for(int i=0;i<FFT_LENGTH/2;i++) {
if(adc8885_val[i] > adc8885_maxval)
adc8885_maxval=adc8885_val[i];
if(adc8885_val[i] < adc8885_minval)
adc8885_minval=adc8885_val[i];
}
*adc8885_avgs += (adc8885_maxval-(adc8885_minval));
}
*adc8885_avgs /= 10.0;
}
结语
main函数过于长且没整理,暂时不贴出
本次还是很可惜,没有将代码写全,若将第三部分的频率拓展到第一、二部分,那才是真真正正的将整个解决完毕,FM解调部分若是想10M-30M均能解调,使用模块的话是肯定不行的,除非至少三块或三块以上的解调模块来互补解调,所以这里的FM解调方法可能采用频谱分析仪的做工思想,用窄带滤波法,分几百Hz的带宽来在频带上一路扫过去,若只有一根则是无调制,三根则是AM调制,若干根则是FM调制。