最小二乘法及OpenCv函数
1.最小二乘法
我们以最简单的一元线性模型来解释最小二乘法。什么是一元线性模型呢? 监督学习中,如果预测的变量是离散的,我们称其为分类(如决策树,支持向量机等),如果预测的变量是连续的,我们称其为回归。回归分析中,如果只包括一个自变量和一个因变量,且二者的关系可用一条直线近似表示,这种回归分析称为一元线性回归分析。如果回归分析中包括两个或两个以上的自变量,且因变量和自变量之间是线性关系,则称为多元线性回归分析。对于二维空间线性是一条直线;对于三维空间线性是一个平面,对于多维空间线性是一个超平面...
对于一元线性回归模型, 假设从总体中获取了n组观察值(X1,Y1),(X2,Y2), …,(Xn,Yn)。对于平面中的这n个点,可以使用无数条曲线来拟合。要求样本回归函数尽可能好地拟合这组值。综合起来看,这条直线处于样本数据的中心位置最合理。 选择最佳拟合曲线的标准可以确定为:使总的拟合误差(即总残差)达到最小。有以下三个标准可以选择:
(1)用“残差和最小”确定直线位置是一个途径。但很快发现计算“残差和”存在相互抵消的问题。
(2)用“残差绝对值和最小”确定直线位置也是一个途径。但绝对值的计算比较麻烦。
(3)最小二乘法的原则是以“残差平方和最小”确定直线位置。用最小二乘法除了计算比较方便外,得到的估计量还具有优良特性。这种方法对异常值非常敏感。
最常用的是普通最小二乘法( Ordinary Least Square,OLS):所选择的回归模型应该使所有观察值的残差平方和达到最小。(Q为残差平方和)- 即采用平方损失函数。
样本回归模型:
 其中ei为样本(Xi, Yi)的误差
其中ei为样本(Xi, Yi)的误差
平方损失函数:

则通过Q最小确定这条直线,即确定 ,以
,以 为变量,把它们看作是Q的函数,就变成了一个求极值的问题,可以通过求导数得到。求Q对两个待估参数的偏导数:
为变量,把它们看作是Q的函数,就变成了一个求极值的问题,可以通过求导数得到。求Q对两个待估参数的偏导数:
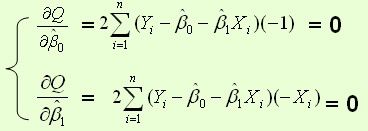
根据数学知识我们知道,函数的极值点为偏导为0的点。
解得:
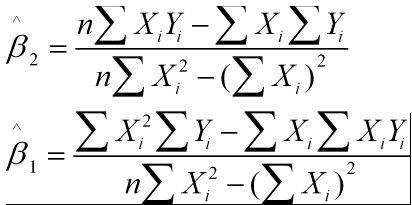
这就是最小二乘法的解法,就是求得平方损失函数的极值点。
2.OpenCv CvSolve函数
Opencv CvSolve函数主要是用来求解线性系统Ax=b的方程,X的解。solve函数跟它的算法是一样的,也是用来求解线性系统。
设方程Ax = b.根据有效的方程个数和未知数的个数,可以分为以下3种情况:
1)rank(A) < n,也就是说方程个数小于未知数的个数,约束不够,方程存在无数组解,
2) rank(A) = n 方程个数等于未知数的个数, 方程存在唯一的精确解,解法通常有我们熟悉的消元法,LU分解法
3) rank(A) > n,方程个数多于未知数个数,这个时候约束过于严格,没有精确解,这种方程又称之为超定方程。通常工程应用都会遇到这种情况,找不到精确解的情况下,我们选取最优解。这个最优解,又称之为最小二乘解。
前面2种情况是比较好理解的,我们在这里就不多说了,我们重点研究的是第3种情况,也是我们应用中碰到最多最常见的情况。
求解线性系统或者最小二乘法问题
int cvSolve( const CvArr* src1, const CvArr* src2, CvArr* dst, int method=CV_LU );
src1
输入矩阵
src2
线性系统的右部
dst
输出解答
method
解决方法(矩阵求逆) :
CV_LU - 最佳主元选取的高斯消除法
CV_SVD - 奇异值分解法 (SVD)
CV_SVD_SYM - 对正定对称矩阵的 SVD 方法
函数 cvSolve 解决线性系统或者最小二乘法问题 (后者用 SVD 方法可以解决):
dst = argmin |src1*X -src2|
如果使用 CV_LU 方法。 如果 src1 是非奇异的,该函数则返回 1 ,否则返回 0 ,在后一种情况下 dst 是无效的。
3.最小二乘法C++实现
/*
2 最小二乘法C++实现
3 参数1为输入文件
4 输入 : x
5 输出: 预测的y
6 */
7 #include
8 #include
9 #include
10 using namespace std;
11
12 class LeastSquare{
13 double a, b;
14 public:
15 LeastSquare(const vector& x, const vector& y)
16 {
17 double t1=0, t2=0, t3=0, t4=0;
18 for(int i=0; i x;
51 ifstream in(argv[1]);
52 for(double d; in>>d; )
53 x.push_back(d);
54 int sz = x.size();
55 vector y(x.begin()+sz/2, x.end());
56 x.resize(sz/2);
57 LeastSquare ls(x, y);
58 ls.print();
59
60 cout<<"Input x:\n";
61 double x0;
62 while(cin>>x0)
63 {
64 cout<<"y = "< 本文参考:
[1] http://blog.csdn.net/lotus___/article/details/20546259
[2] http://blog.sina.com.cn/s/blog_3e6817300100ex8y.html