OpenCV图像处理技术(Python)——霍夫变换
©FuXianjun
霍夫变换是一种在图像中寻找直线,原先以及其他简单形状的方法。霍夫变换采用类似于投票的方式来获取当前图像内的形状集合。
这次主要介绍霍夫直线变换和霍夫圆变换。霍夫直线变换用来在图像内寻找直线,霍夫圆变换用来在图像内寻找圆。在OpenCV中前者可以用函数cv2.HougLines()和函数cv2.HougLinesP()实现,后者可以用函数cv2.HoughCircles()实现。
霍夫变换原理
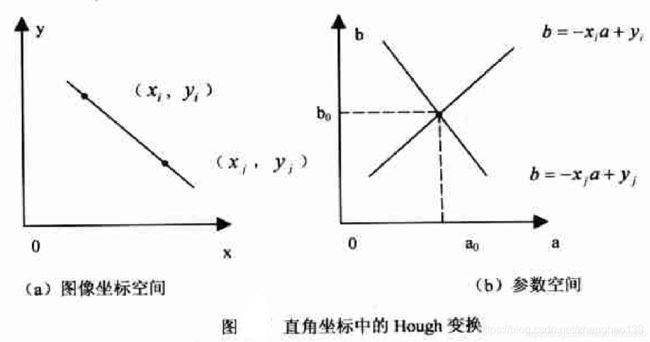
大家都知道一个直线可以表示为 y=ax+b, 我们知道, 只要 a和b想等,那么就知道这是一条直线.
通过简单的变换,我们可以将这个函数表示为 b=y-ax. 就是关于 a和b的函数. 这种将数据问题变换为参数问题的变换,就是霍夫变换.
不管图像上的点是什么,只要两个点的计算出上面的a和b值一样,那么就肯定是同一条直线.
最简单的霍夫变换是在图像中识别直线。在平面直角坐标系(x-y)中,一条直线可以用方程
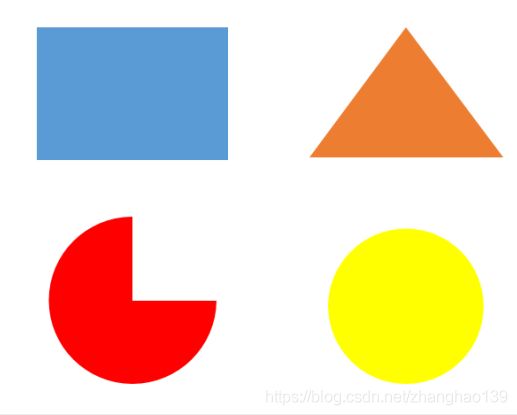
案例1
利用霍夫直线变换来在图像内的直线
代码实现
import cv2
import numpy
img = cv2.imread("shape.png")
# 1.轮廓检测算法检测出轮廓
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray, 50, 150)
# 2.投射到Hough空间进行形状检测
# 任何一条线都可以用(ρ,θ)这两个术语表示。
# 1)先定义一个累加器,(ρ,θ)对应直线,ρ和θ都分别依次增大(根据精度),计算每对(ρ,θ)的投票数。
# 其中,ρ以像素为单位,θ以弧度为单位。rho和theta是ρ和θ的精度。
# 2)然后,根据threshold(阈值,最低投票数)来判断是否归为一条直线
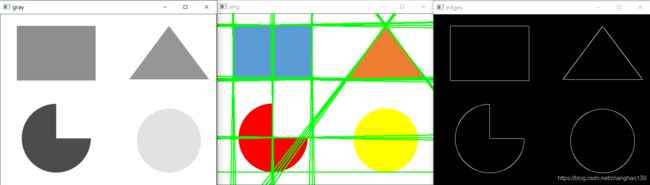
lines = cv2.HoughLines(edges, 1, np.pi / 180, 50)
# 画线
for line in lines:
rho, theta = line[0]
a = numpy.cos(theta)
b = numpy.sin(theta)
x0 = rho * a
y0 = rho * b
x1 = int(x0 + 1000 * (-b)) #这里的1000是为了求延长线,其他数值也可以
y1 = int(y0 + 1000 * a)
x2 = int(x0 - 1000 * (-b))
y2 = int(y0 - 1000 * a)
# 画线
cv2.line(img, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.imshow("img", img)
cv2.imshow("gray", gray)
cv2.imshow("edges", edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
import cv2
import numpy
img = cv2.imread("shape.png")
# 1.轮廓检测算法检测出轮廓
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray, 50, 150)
minLineLength = 10
maxLineGap = 30
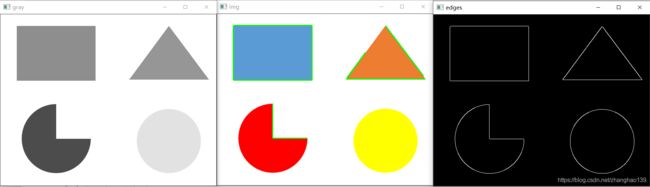
lines = cv2.HoughLinesP(edges, 1, np.pi / 180, 10,minLineLength,maxLineGap)
# 画线
for line in lines:
x1, y1, x2, y2 = line[0]
cv2.line(img, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.imshow("img", img)
cv2.imshow("gray", gray)
cv2.imshow("edges", edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 2.圆检测
import cv2
import numpy
img = cv2.imread("shape.png")
# 1.轮廓检测算法检测出轮廓
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray, 50, 100)
# 2.投射到Hough空间进行形状检测
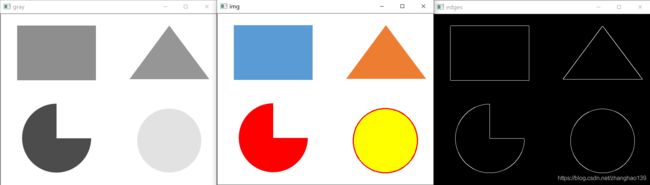
circles = cv2.HoughCircles(edges, cv2.HOUGH_GRADIENT, 1, 30,\
param1=40, param2=20, minRadius=5, maxRadius=100)
# 画圆
if not circles is None:
# 转换为int
circles = np.uint16(numpy.around(circles))
for circle in circles:
x, y, r = circle[0]
# 画圆
cv2.circle(img, (x, y), r, (0, 0, 255), 2)
cv2.imshow("gray", gray)
cv2.imshow("edges", edges)
cv2.imshow("img", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
案例2
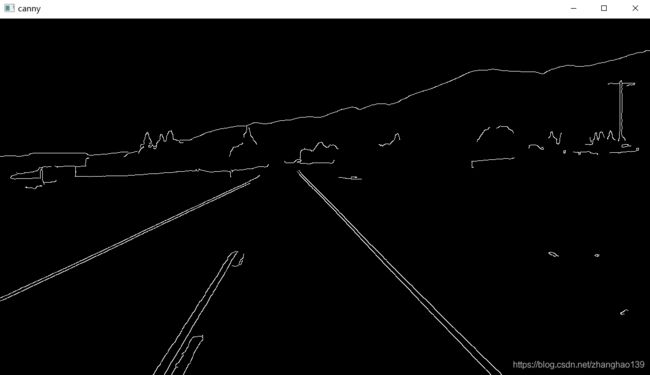
利用霍夫变换进行车道检测

代码实现
import cv2
import numpy as np
def canny(image):
#gray = cv2.cvtColor(image,cv2.COLOR_RGB2GRAY)
blur = cv2.GaussianBlur(image,(5,5),0)#降低噪点
canny = cv2.Canny(blur,50,150)
return canny
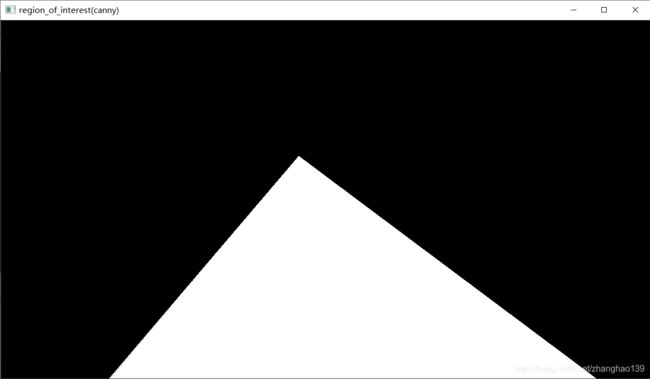
def region_of_interest(image):#应用遮罩
height = image.shape[0]
ploygons = np.array([[(200,height),(1100,height),(550,250)]])
mask = np.zeros_like(image)
cv2.fillPoly(mask,ploygons,255)
return mask
# read image
image = cv2.imread('test_image.jpg',0)
imgcopy = image.copy()
# copy not reference to
lane_image = np.copy(image)
canny = canny(lane_image)
roi = region_of_interest(canny)#ROI
masked_image = cv2.bitwise_and(image,roi)#通过 bitwise_and 对两个图像的每一个像素做与运算,来将遮罩应用图像
cv2.imshow('canny',canny)
cv2.imshow('region_of_interest(canny)',roi)
cv2.imshow('masked_image',masked_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果