视觉SLAM十四讲-高翔 第8讲 视觉里程计2
视觉里程计
1.直接法的引出
尽管特征点法在视觉里程计中占
据主流地位,研究者们认识到它至少有以下几个缺点:
- 关键点的提取与描述子的计算非常耗时。实践当中,SIFT 目前在 CPU 上是无法实时计算的,而 ORB 也需要近 20 毫秒的计算。如果整个 SLAM 以 30 毫秒/帧的速度运行,那么一大半时间都花在计算特征点上。
- 使用特征点时,忽略了除特征点以外的所有信息。一张图像有几十万个像素,而特征点只有几百个。只使用特征点丢弃了大部分可能有用的图像信息。
- 相机有时会运动到特征缺失的地方,往往这些地方没有明显的纹理信息。例如,有时我们会面对一堵白墙,或者一个空荡荡的走廓。这些场景下特征点数量会明显减少,我们可能找不到足够的匹配点来计算相机运动。
使用特征点法估计相机运动时,我们把特征点看作固定在三维空间的不动点。根据它们在相机中的投影位置,通过最小化重投影误差 (Reprojection error)来优化相机运动。在这个过程中,我们需要精确地知道空间点在两个相机中投影后的像素位置——这也就是我们为何要对特征进行匹配或跟踪的理由。同时,我们也知道,计算、匹配特征需要付出大量的计算量。相对的,在直接法中,我们并不需要知道点与点之间之间的对应关系,而是通过最小化光度误差(Photometric error)来求得它们。
2. 光流(Optical Flow)
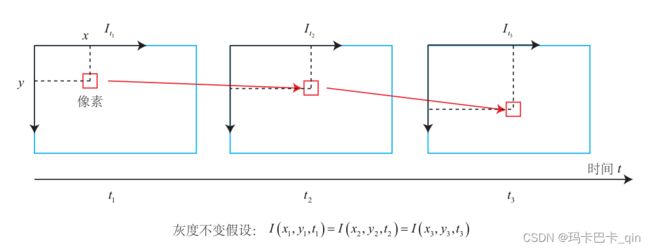 光流是一种描述像素随着时间,在图像之间运动的方法,如图 8-1 所示。随着时间的经过,同一个像素会在图像中运动,而我们希望追踪它的运动过程。计算部分像素运动的称为稀疏光流,计算所有像素的称为稠密光流。稀疏光流以 Lucas-Kanade 光流为代表,并可以在 SLAM 中用于跟踪特征点位置。
光流是一种描述像素随着时间,在图像之间运动的方法,如图 8-1 所示。随着时间的经过,同一个像素会在图像中运动,而我们希望追踪它的运动过程。计算部分像素运动的称为稀疏光流,计算所有像素的称为稠密光流。稀疏光流以 Lucas-Kanade 光流为代表,并可以在 SLAM 中用于跟踪特征点位置。
2.1 Lucas-Kanade 光流



在 LK 光流中,我们假设某一个窗口内的像素具有相同的运动。

3. 实践:LK光流
THU数据集处理如果遇到报错,参考:
使用TUM的associate.py脚本报错AttributeError: ‘dict_keys‘ object has no attribute ‘remove‘
useLK.cpp
#include
#include CMakeLIsts.txt
cmake_minimum_required( VERSION 2.8 )
project( useLK )
set( CMAKE_BUILD_TYPE Release )
find_package( OpenCV )
include_directories( ${OpenCV_INCLUDE_DIRS} )
add_executable( useLK useLK.cpp )
target_link_libraries( useLK ${OpenCV_LIBS} )
输出结果

4. 直接法(Direct Methods)
4.1 直接法的推导







4.2 直接法的讨论
在我们上面的推导中,P 是一个已知位置的空间点,它是怎么来的呢?在 RGB-D 相机下,我们可以把任意像素反投影到三维空间,然后投影到下一个图像中。如果在单目相机中,这件事情要更为困难,因为我们还需考虑由 P 的深度带来的不确定性。详细的深度估计放到 13 讲中讨论。现在我们先来考虑简单的情况,即 P 深度已知的情况。
根据 P 的来源,我们可以把直接法进行分类:
- P 来自于稀疏关键点,我们称之为稀疏直接法。通常我们使用数百个至上千个关键点,并且像 L-K 光流那样,假设它周围像素也是不变的。这种稀疏直接法不必计算描述子,并且只使用数百个像素,因此速度最快,但只能计算稀疏的重构。
- P 来自部分像素。我们看到式(8.16)中,如果像素梯度为零,整一项雅可比就为零,不会对计算运动增量有任何贡献。因此,可以考虑只使用带有梯度的像素点,舍弃像素梯度不明显的地方。这称之为半稠密(Semi-Dense)的直接法,可以重构一个半稠密结构。
- P 为所有像素,称为稠密直接法。稠密重构需要计算所有像素(一般几十万至几百万个),因此多数不能在现有的 CPU 上实时计算,需要 GPU 的加速。但是,如前面所讨论的,梯度不明显的点,在运动估计中不会有太大贡献,在重构时也会难以估计位置。
5. 实践:RGB-D 的直接法
5.1 稀疏直接法
直接法是由以下顶点和边组成的:
- 优化变量为一个相机位姿,因此需要一个位姿顶点。由于我们在推导中使用了李代数,故程序中使用李代数表达的 SE(3) 位姿顶点。与上一章一样,我们将使用“Ver-texSE3Expmap”作为相机位姿。
- 误差项为单个像素的光度误差。由于整个优化过程中 I 1 (p 1 ) 保持不变,我们可以把它当成一个固定的预设值,然后调整相机位姿,使 I 2 (p 2 ) 接近这个值。于是,这种边只连接一个顶点,为一元边。由于 g2o 中本身没有计算光度误差的边,我们需要自己定义一种新的边。
direct_sparse.cpp
#include
#include > DirectBlock; // 求解的向量是6*1的
DirectBlock::LinearSolverType* linearSolver = new g2o::LinearSolverDense< DirectBlock::PoseMatrixType > ();
DirectBlock* solver_ptr = new DirectBlock ( linearSolver );
// g2o::OptimizationAlgorithmGaussNewton* solver = new g2o::OptimizationAlgorithmGaussNewton( solver_ptr ); // G-N
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg ( solver_ptr ); // L-M
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm ( solver );
optimizer.setVerbose( true );
*/
// 初始化g2o(新版本用法)
typedef g2o::BlockSolver<g2o::BlockSolverTraits<6,1>> DirectBlock; // 求解的向量是6*1的
std::unique_ptr<DirectBlock::LinearSolverType> linearSolver ( new g2o::LinearSolverDense<DirectBlock::PoseMatrixType>());
std::unique_ptr<DirectBlock> solver_ptr ( new DirectBlock ( std::move(linearSolver))); // 矩阵块求解器
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg ( std::move(solver_ptr));
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm ( solver );
optimizer.setVerbose( true );
g2o::VertexSE3Expmap* pose = new g2o::VertexSE3Expmap();
pose->setEstimate ( g2o::SE3Quat ( Tcw.rotation(), Tcw.translation() ) );
pose->setId ( 0 );
optimizer.addVertex ( pose );
// 添加边
int id=1;
for ( Measurement m: measurements )
{
EdgeSE3ProjectDirect* edge = new EdgeSE3ProjectDirect (
m.pos_world,
K ( 0,0 ), K ( 1,1 ), K ( 0,2 ), K ( 1,2 ), gray
);
edge->setVertex ( 0, pose );
edge->setMeasurement ( m.grayscale );
edge->setInformation ( Eigen::Matrix<double,1,1>::Identity() );
edge->setId ( id++ );
optimizer.addEdge ( edge );
}
cout<<"edges in graph: "<<optimizer.edges().size() <<endl;
optimizer.initializeOptimization();
optimizer.optimize ( 30 );
Tcw = pose->estimate();
}
CMakeLists.txt
cmake_minimum_required( VERSION 2.8 )
project( directMethod )
set( CMAKE_BUILD_TYPE Release )
# 添加cmake模块路径
list( APPEND CMAKE_MODULE_PATH /home/ql/slamebook/lib/g2o/cmake_modules)
find_package( OpenCV )
include_directories( ${OpenCV_INCLUDE_DIRS} )
find_package( G2O )
include_directories( ${G2O_INCLUDE_DIRS} )
include_directories( "/usr/include/eigen3" )
set( G2O_LIBS
g2o_core g2o_types_sba g2o_solver_csparse g2o_stuff g2o_csparse_extension
)
add_executable( direct_sparse direct_sparse.cpp )
target_link_libraries( direct_sparse ${OpenCV_LIBS} ${G2O_LIBS} )
# add_executable( direct_semidense direct_semidense.cpp )
# target_link_libraries( direct_semidense ${OpenCV_LIBS} ${G2O_LIBS} )
5.6 直接法优缺点总结
最后,我们总结一下直接法的优缺点。大体来说,它的优点如下:
• 可以省去计算特征点、描述子的时间。
• 只要求有像素梯度即可,无须特征点。因此,直接法可以在特征缺失的场合下使用。比较极端的例子是只有渐变的一张图像。它可能无法提取角点类特征,但可以用直接法估计它的运动。
• 可以构建半稠密乃至稠密的地图,这是特征点法无法做到的。
另一方面,它的缺点也很明显:
• 非凸性——直接法完全依靠梯度搜索,降低目标函数来计算相机位姿。其目标函数中需要取像素点的灰度值,而图像是强烈非凸的函数。这使得优化算法容易进入极小,只在运动很小时直接法才能成功。
• 单个像素没有区分度。找一个和他像的实在太多了!——于是我们要么计算图像块,要么计算复杂的相关性。由于每个像素对改变相机运动的“意见”不一致。只能少数服从多数,以数量代替质量。
• 灰度值不变是很强的假设。如果相机是自动曝光的,当它调整曝光参数时,会使得图像整体变亮或变暗。光照变化时亦会出现这种情况。特征点法对光照具有一定的容忍性,而直接法由于计算灰度间的差异,整体灰度变化会破坏灰度不变假设,使算法失败。针对这一点,目前的直接法开始使用更细致的光度模型标定相机,以便在曝光时间变化时也能让直接法工作。