图像处理:二值掩膜影像去噪与边缘强化
前言
这篇博客主要解决的一个问题是掩膜图像的噪声去除和边缘强化,如下图1所示。可以看到掩膜图像上有很多的斑点噪声,而且掩膜的轮廓也不够清晰。所以我们的目标就是一方面尽可能把这些斑点噪声去除,另一方面尽量突出掩膜边界。另外处理后的掩膜可以比真值大一些,但最好不能小。

图1 原始二值化影像
一、方法
因为之前有做过相关的工作,所以对于保留边界的斑点噪声消除第一反应是使用中值滤波。但很显然对于我们这个应用,单纯中值滤波是不够的。所以就想着那就采用多步处理,融合形态学操作。因此设计了一种如下图所示的方法。
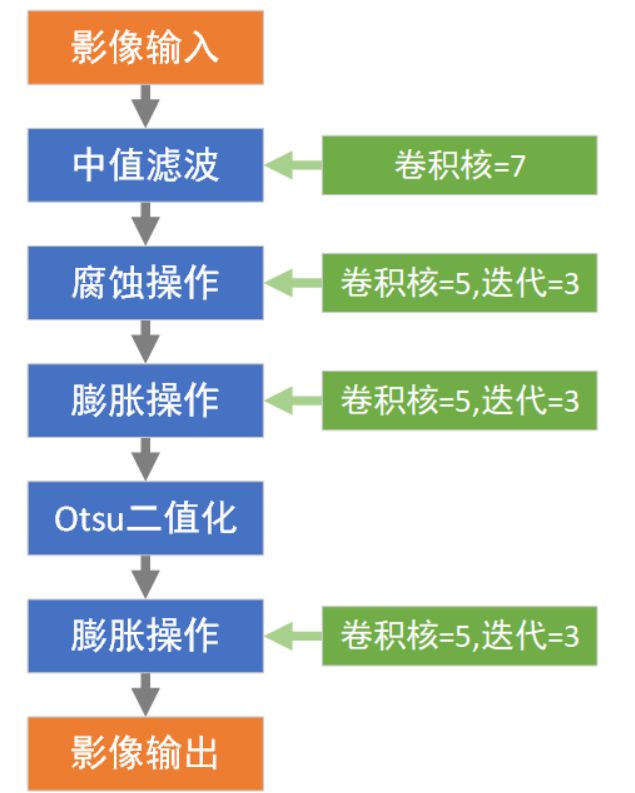
图2 二值掩膜影像去噪与边缘强化技术路线图
中值滤波比较好理解,就是为了消除斑点噪声。而腐蚀操作这是为了处理一些稍大的面状的噪声,通过多次的腐蚀,尽可能消除它们。而后续的3次膨胀操作则是对应3次腐蚀,恢复成“原样”。然后是一个二值化,目的在于进一步去除一些噪声并且强调轮廓。因为有一些较暗的像素经过3次膨胀就会形成很大一块区域。因此,通过二值化可以过滤掉。最后膨胀一方面是为了满足要求“比真值大一些”,另一方面是填充由于腐蚀或者二值化带来的一些空洞。
二、代码
Python版本代码实现如下,非常简单。
import cv2
import numpy as np
import os
def findFiles(root_dir, filter_type, reverse=False):
print("Finding files ends with \'" + filter_type + "\' ...")
separator = os.path.sep
paths = []
names = []
files = []
for parent, dirname, filenames in os.walk(root_dir):
for filename in filenames:
if filename.endswith(filter_type):
paths.append(parent + separator)
names.append(filename)
for i in range(paths.__len__()):
files.append(paths[i] + names[i])
print(names.__len__().__str__() + " files have been found.")
paths.sort()
names.sort()
files.sort()
if reverse:
paths.reverse()
names.reverse()
files.reverse()
return paths, names, files
if __name__ == '__main__':
root_dir = "./mask" # 影像的输入路径
out_dir = "./mask/refine" # 结果的输出路径
file_type = ".jpg" # 文件类型
median_kernel = 7 # 中值滤波卷积核大小
morph_kernel1 = 5 # 形态学操作卷积核大小1
morph_kernel2 = 5 # 形态学操作卷积核大小2
morph_iter1 = 3 # 形态学操作迭代次数1
morph_iter2 = 3 # 形态学操作迭代次数2
paths, names, files = findFiles(root_dir, file_type)
kernel1 = np.ones((morph_kernel1, morph_kernel1), np.uint8)
kernel2 = np.ones((morph_kernel2, morph_kernel2), np.uint8)
for i in range(len(files)):
img_gray = cv2.imread(files[i], cv2.IMREAD_GRAYSCALE)
# 主要流程:先做一次中值滤波,去除零碎像素噪声点
# 然后再做3次腐蚀操作去除一些噪声块,再做3次膨胀操作填充回来
# 然后,做个Otsu二值化,把一些潜在的噪声去除
# 最后,为了使掩膜尽可能包含真值,再做一次膨胀操作
img_median = cv2.medianBlur(img_gray, ksize=median_kernel)
img_erode = cv2.erode(img_median, kernel1, iterations=morph_iter1)
img_dilate = cv2.dilate(img_erode, kernel1, iterations=morph_iter1)
ret, img_threshold = cv2.threshold(img_dilate, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
img_mask = cv2.dilate(img_threshold, kernel2, iterations=morph_iter2)
# 绘制轮廓,可视化,以及保存
_, contours, _ = cv2.findContours(img_mask, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
img_rgb = cv2.cvtColor(img_gray, cv2.COLOR_GRAY2BGR)
img_contours = cv2.drawContours(img_rgb, contours, -1, (0, 0, 255))
cv2.imwrite(out_dir + "/" + names[i].split(".")[0] + "_refine.jpg", img_mask)
cv2.imwrite(out_dir + "/" + names[i].split(".")[0] + "_range.jpg", img_contours)
# 如果需要查看每一步结果,可以把下面这些注释掉
# cv2.imwrite(out_dir + "/" + names[i].split(".")[0] + "_median.jpg", img_median)
# cv2.imwrite(out_dir + "/" + names[i].split(".")[0] + "_erode.jpg", img_erode)
# cv2.imwrite(out_dir + "/" + names[i].split(".")[0] + "_dilate.jpg", img_dilate)
# cv2.imwrite(out_dir + "/" + names[i].split(".")[0] + "_threshold.jpg", img_threshold)
print(i + 1, "/", len(files))三、效果测试
为了测试效果,输出了中间过程的结果。如下是输入的原始影像。

然后首先进行中值滤波,结果如下。

然后进行3次腐蚀操作,以去除一些噪声,如下。

为了保证掩膜和输入一样,再膨胀3次,结果如下。

由于掩膜是0-1影像,为了过滤掉一些中间值,进行一次二值化,结果如下。

二值化以后难免会有一些空洞,因此使用膨胀操作进行填充,最终生成的掩膜如下。

将生成的掩膜范围绘制到输入影像上(红色框线)如下图所示。

总结
以上就是本文的全部内容,希望对大家的学习有所帮助