非均匀三次B样条曲线插值实现及MATLAB代码
这篇博客跟我上一篇博客《均匀三次B样条曲线插值实现及MATLAB代码》的内容有点像,只是在基函数的计算上不同,造成均匀/非均匀的区别。
参考资料:
[1](这个PPT讲得很通俗,但对于多插值点分段曲线的内容漏讲了一个知识点)三次周期B样条曲线的算法 - 百度文库 (baidu.com)
[2](这个介绍只有两个插值点的三次B样条曲线,是B样条曲线最简单的形式了吧~)(7条消息) 从B样条的插值点反求控制点_cofd的专栏-CSDN博客
[3](一本书,里面有讲到整体参数和局部参数设置、节点矢量划分等)《计算机辅助几何设计与非均匀有理B样条》
正文:
曲线插值一般指的是给定插值点,得出曲线的方程,曲线会经过所有的插值点。确定三次B样条曲线的输入量有两种,一种是给出控制点和其它边界条件,曲线一般不经过控制点;一种是给出插值点和其它边界条件,曲线会经过所有插值点,显然第二种输入量使用更为广泛,这里只介绍第二种情况。
①首先输入插值点,这些插值点可以是二维(x,y)点,也可以是三维(x,y,z)点,甚至更多维都可以,处理方法都相似,以二维点为例,MATLAB代码:
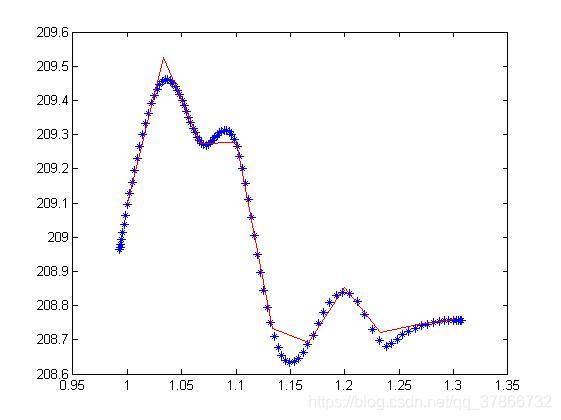
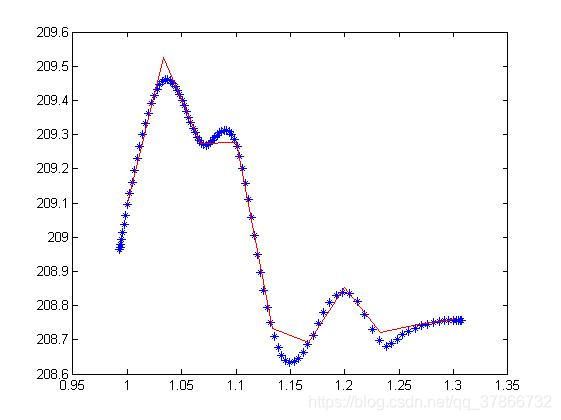
pointInput=[1 209.1;1.033 209.525;1.067 209.273;1.1 209.277;
1.133 208.734;1.167 208.693;1.2 208.852;1.233 208.722;1.267 208.746;1.3 208.759];这些点的分布如下图的红色拆线所示(不是蓝色的*型点,蓝色的是我最终拟合的曲线)。
②计算N、n、k等值
N为插值点的个数,上面共有10个插值点,所以N=10。控制点个数为N+2个。n=N+1。k为次数,这里是三次B样条曲线,所以k=3。MATLAB代码:
N=length(pointInput);
k=3;
n=N-1;③反算控制点
这里主要参考了资料[1]PPT中的内容,具体的请查看该PPT。三次B样条曲线的表达式(1)为
其中![]() 是第i段曲线的表达式,
是第i段曲线的表达式,![]() 是局部参数,
是局部参数,![]() 是第i个控制点。注意节点、节点矢量、整体参数、局部参数的区别(具体的要看资料[3]或其它相关的资料了,说明这些可能需要长篇大论哦~)。
是第i个控制点。注意节点、节点矢量、整体参数、局部参数的区别(具体的要看资料[3]或其它相关的资料了,说明这些可能需要长篇大论哦~)。
反算控制点,我用了第三种边界条件,如下图

增加了边界条件后,就能求如下图的矩阵方程了,其实下面的矩阵方程是由表达式(1)得到的,具体可以参考资料[1]的PPT(注意表达式中的系数6不要看漏了)。
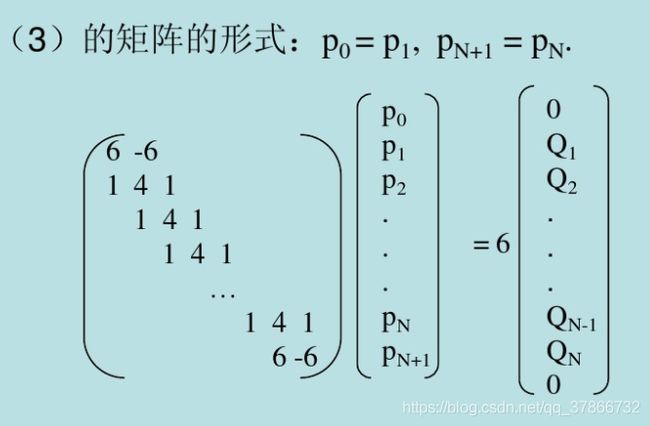
对于二维点,我想对x和y坐标的B样条曲线都求出来,所以用了两组矩阵方程求解它们各自的控制点(对于三维点,还能用同样的方法求z坐标的B样条曲线)。MATLAB代码:
%①先求x、y坐标,如果是三维点,还要求z
b1=[0;pointInput(:,1);0]*6;%注意系数
px=Chase_method(A1,b1);%用追赶法求得所有控制点
b2=[0;pointInput(:,2);0]*6;
py=Chase_method(A1,b2);其中求三对角阵解用追赶法Chase_method(可以直接用常用 的方法求解,但此处用追赶法时间复杂度更低),其MATLAB代码:
的方法求解,但此处用追赶法时间复杂度更低),其MATLAB代码:
function [ x ] = Chase_method( A, b )
%Chase method 追赶法求三对角矩阵的解
% A为三对角矩阵的系数,b为等式右端的常数项,返回值x即为最终的解
% 注:A尽量为方阵,b一定要为列向量
%% 求追赶法所需L及U
T = A;
for i = 2 : size(T,1)
T(i,i-1) = T(i,i-1)/T(i-1,i-1);
T(i,i) = T(i,i) - T(i-1,i) * T(i,i-1);
end
L = zeros(size(T));
L(logical(eye(size(T)))) = 1; %对角线赋值1
for i = 2:size(T,1)
for j = i-1:size(T,1)
L(i,j) = T(i,j);
break;
end
end
U = zeros(size(T));
U(logical(eye(size(T)))) = T(logical(eye(size(T))));
for i = 1:size(T,1)
for j = i+1:size(T,1)
U(i,j) = T(i,j);
break;
end
end
%% 利用matlab解矩阵方程的遍历直接求解
y = L\b;
x = U\y;
end④确定节点矢量
节点矢量是分段B样条曲线进行分段的依据(请看下资料[3]或其它相应资料),我用哈德利-贾德方法确定节点矢量![]() (节点矢量共有n+k+2个,注意这里是小写n而不是大写的N),即节点矢量中前k+1个节点取值0,后k+1个节点取值为1,重复度为k+1,然后中间的节点
(节点矢量共有n+k+2个,注意这里是小写n而不是大写的N),即节点矢量中前k+1个节点取值0,后k+1个节点取值为1,重复度为k+1,然后中间的节点![]() 由哈德利-贾德方法计算得到。MATLAB代码(注意MATLAB的数组和矩阵的下标是从1开始的,与公式中的从0开始有区别):
由哈德利-贾德方法计算得到。MATLAB代码(注意MATLAB的数组和矩阵的下标是从1开始的,与公式中的从0开始有区别):
%确定节点矢量
u=zeros(1,N+1+k+2);%0:1/(N+1+k+2-1):1;
for i=1:k+1
u(length(u)-i+1)=1;
end
l=zeros(1,N+1);%控制多边形各边长
for i=1:N+1
%注意如果用到三维点,这里要作修改
l(i)=sqrt((px(i+1)-px(i))^2+(py(i+1)-py(i))^2);
end
sum1=0;%用哈德利-贾德方法决定节点矢量
for g=k+1:N+1+1
for j=g-k:g-1
sum1=sum1+l(j);
end
end
for i=k+2:N+2
u(i)=sum(l(i-k:i-1))/sum1+u(i-1);
end计算得到了所有的控制点以及节点矢量,已经能知道该分段B样条曲线的表达式了,下面就输入一个点来测试。其实该分段B样条曲线用参数方程表示,x、y坐标都以参数u来表示,同时以节点矢量中每个节点作为分段曲线分段的边界,U中的元素的单调不减小的,后一个元素一不小于一个元素。下面MATLAB代码使u取值为测试点uTest,然后先找到uTest属于哪个分段,计算得到uTest属于score分段:
uTest=0.5;
score=find(uTest>=u,1,'last');%确定该参数方程的参数值所属的分段
if uTest==1 score=find(u==1,1)-1;end
score=score-k;%表示第score段样条曲线在用表达式(1)求出参数uTest对应的x、y坐标值之间,需要将整体变量uTest转换为局部变量t。注意uTest在整体样条曲线中的取值范围是[0,1],而t在第score分段曲线中的取值范围是[0,1]。转换公式为![]() (
( 为节点矢量中第i+1个元素,且满足
为节点矢量中第i+1个元素,且满足![]() ,这里的i可由score确定),从而
,这里的i可由score确定),从而![]() ,得到表达式(1)中的矩阵
,得到表达式(1)中的矩阵![]() ,MATLAB代码:
,MATLAB代码:
uNode=1;%上面的uTest是整体参数,用来确定是哪段曲线,要将整体参数转化为局部参数t
t=(uTest-u(score+k))/(u(score+1+k)-u(score+k));
for i=1:k
uNode=[t^i uNode];
end对比我另一篇博客《均匀三次B样条曲线插值实现及MATLAB代码》,本篇博客的样条曲线是非均匀的,即用的基函数并不是固定的值,而是由德布尔-考克斯递推公式计算得到。先求出基函数,MATLAB代码:
Nb=zeros(k+3,k+1);
for j=1:k+1
for i=1:n+1
if j==1
if i==score+k
Nb(i,j)=1; continue;
else
Nb(i,j)=0; continue;
end
else
%if u(i+j-1)-u(i)==0||u(i+j+1-1)-u(i+1)==0 continue;end
if u(i+j-1)-u(i)==0&&u(i+j+1-1)-u(i+1)==0
Nb(i,j)=0;
elseif u(i+j-1)-u(i)==0
Nb(i,j)=(u(i+j+1-1)-uTest)/(u(i+j+1-1)-u(i+1))*Nb(i+1,j-1);
elseif u(i+j+1-1)-u(i+1)==0
Nb(i,j)=(uTest-u(i))/(u(i+j-1)-u(i))*Nb(i,j-1);
else
Nb(i,j)=(uTest-u(i))/(u(i+j-1)-u(i))*Nb(i,j-1)+(u(i+j+1-1)-uTest)/(u(i+j+1-1)-u(i+1))*Nb(i+1,j-1);
end
%Nb(i,j)=(uTest-u(i))/(u(i+j-1)-u(i))*Nb(i,j-1)+(u(i+j+1-1)-uTest)/(u(i+j+1-1)-u(i+1))*Nb(i+1,j-1);
end
end
end最后由基函数和控制点计算得到梦寐以求的x、y坐标值,MATLAB代码:
Qx=0;Qy=0;
for i=score:score+k %注意非零基函数的个数
Qx=Qx+px(i)*Nb(i,k+1);
Qy=Qy+py(i)*Nb(i,k+1);
end附上全部MATLAB程序:
%三次B样条插值,给定插值点及两个边界条件,反算出控制点,由控制点得到分段曲线
%三维点(x,y,z)和二维点(x,y)的插值算法类似,控制多边形各边长l要作修改
%pointInput插值点
pointInput=[1 209.1;1.033 209.525;1.067 209.273;1.1 209.277;
1.133 208.734;1.167 208.693;1.2 208.852;1.233 208.722;1.267 208.746;1.3 208.759];
%pointInput=[0 10;5 8.66;10 0];
%用第三种边界条件 https://wenku.baidu.com/view/2482396e011ca300a6c390b3.html
N=length(pointInput);
k=3;
A1=eye(N+2,N+2)*4;
A1(1,1)=6;A1(1,2)=-6;A1(N+2,N+1)=6;A1(N+2,N+2)=-6;
for i=2:N+1
A1(i,i-1)=1;A1(i,i+1)=1;
end
%①先求x、y坐标,如果是三维点,还要求z
b1=[0;pointInput(:,1);0]*6;%注意系数
px=Chase_method(A1,b1);%用追赶法求得所有控制点
b2=[0;pointInput(:,2);0]*6;
py=Chase_method(A1,b2);
%确定节点矢量
u=zeros(1,N+1+k+2);%0:1/(N+1+k+2-1):1;
for i=1:k+1
u(length(u)-i+1)=1;
end
l=zeros(1,N+1);%控制多边形各边长
for i=1:N+1
%注意如果用到三维点,这里要作修改
l(i)=sqrt((px(i+1)-px(i))^2+(py(i+1)-py(i))^2);
end
sum1=0;%用哈德利-贾德方法决定节点矢量
for g=k+1:N+1+1
for j=g-k:g-1
sum1=sum1+l(j);
end
end
for i=k+2:N+2
u(i)=sum(l(i-k:i-1))/sum1+u(i-1);
end
%用基函数求值
%uTestArray=0:0.01:1;
for uTest=0:0.01:1
%uTest=0.5;
%u3Array=[uTest^3 uTest^2 uTest 1];%三次B样条专属
score=find(uTest>=u,1,'last');%确定该参数方程的参数值所属的分段
if uTest==1 score=find(u==1,1)-1;end
score=score-k;%表示第score段样条曲线
%用德布尔-考克斯递推公式计算基函数
Nb=zeros(k+3,k+1);
for j=1:k+1
for i=1:n+1
if j==1
if i==score+k
Nb(i,j)=1; continue;
else
Nb(i,j)=0; continue;
end
else
%if u(i+j-1)-u(i)==0||u(i+j+1-1)-u(i+1)==0 continue;end
if u(i+j-1)-u(i)==0&&u(i+j+1-1)-u(i+1)==0
Nb(i,j)=0;
elseif u(i+j-1)-u(i)==0
Nb(i,j)=(u(i+j+1-1)-uTest)/(u(i+j+1-1)-u(i+1))*Nb(i+1,j-1);
elseif u(i+j+1-1)-u(i+1)==0
Nb(i,j)=(uTest-u(i))/(u(i+j-1)-u(i))*Nb(i,j-1);
else
Nb(i,j)=(uTest-u(i))/(u(i+j-1)-u(i))*Nb(i,j-1)+(u(i+j+1-1)-uTest)/(u(i+j+1-1)-u(i+1))*Nb(i+1,j-1);
end
%Nb(i,j)=(uTest-u(i))/(u(i+j-1)-u(i))*Nb(i,j-1)+(u(i+j+1-1)-uTest)/(u(i+j+1-1)-u(i+1))*Nb(i+1,j-1);
end
end
end
Qx=0;Qy=0;
for i=score:score+k %注意非零基函数的个数
Qx=Qx+px(i)*Nb(i,k+1);
Qy=Qy+py(i)*Nb(i,k+1);
end
plot(Qx,Qy,'*');hold on;
end
plot(pointInput(:,1),pointInput(:,2),'r');function [ x ] = Chase_method( A, b )
%Chase method 追赶法求三对角矩阵的解
% A为三对角矩阵的系数,b为等式右端的常数项,返回值x即为最终的解
% 注:A尽量为方阵,b一定要为列向量
%% 求追赶法所需L及U
T = A;
for i = 2 : size(T,1)
T(i,i-1) = T(i,i-1)/T(i-1,i-1);
T(i,i) = T(i,i) - T(i-1,i) * T(i,i-1);
end
L = zeros(size(T));
L(logical(eye(size(T)))) = 1; %对角线赋值1
for i = 2:size(T,1)
for j = i-1:size(T,1)
L(i,j) = T(i,j);
break;
end
end
U = zeros(size(T));
U(logical(eye(size(T)))) = T(logical(eye(size(T))));
for i = 1:size(T,1)
for j = i+1:size(T,1)
U(i,j) = T(i,j);
break;
end
end
%% 利用matlab解矩阵方程的遍历直接求解
y = L\b;
x = U\y;
end效果图,蓝色点的是曲线拟合的点,红色拆线是由插值点组成的: