卷积层、卷积层里的填充和步幅
多层感知机
正式总结卷积层之前,先把上次多层感知机落下的一点内容补一补。
几个概念:
训练数据集:训练模型参数。
验证数据集:选择模型超参数。
训练误差:模型在训练数据上的误差。
泛化误差:模型在新数据上的误差。
结论:
非大数据集上通常使用k-折交叉验证。
权重衰退通过L2正则项使得模型参数不会过大,从而控制模型复杂度。
正则项权重是控制模型复杂度的超参数。
让训练更稳定的方法:
让梯度在合理的范围
将乘法变加法。
归一化。
合理的权重初始和激活函数。
卷积层
二维卷积层
输入X,卷积核W,输出Y=X*W+b,w和b是可学习的参数
一维和三维交叉相关
一维:
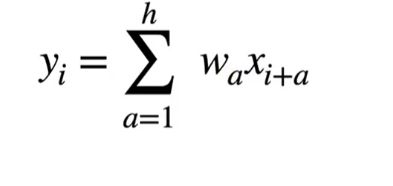
比如说,文本,语言,时间序列。
三维:
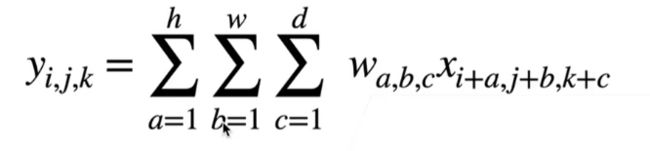
比如说视频,医学影像,气象地图。
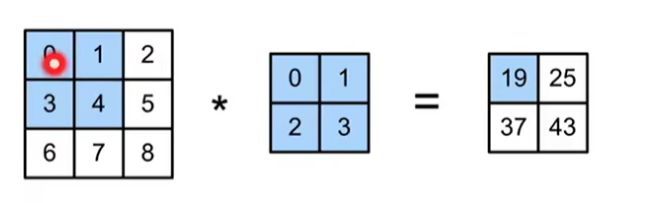
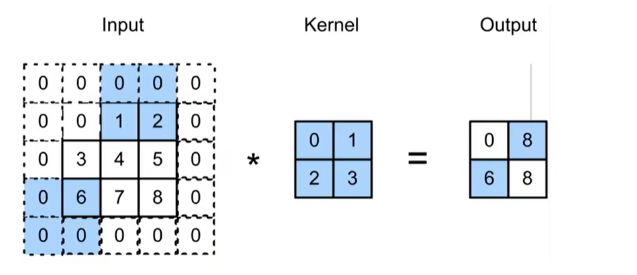
卷积层将输入和核矩阵进行交叉相关,加上偏移后得到输出。
核矩阵和偏移是可学习的参数。
核矩阵的大小是超参数。
互相关运算(卷积层)代码实现:
import torch
from torch import nn
from d2l import torch as d2l
def corr2d(X, K):
# 计算二维互相关运算
h, w = K.shape
Y = torch.zeros((X.shape[0] - h + 1, X.shape[1] - w + 1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i, j] = (X[i:i + h, j:j + w] * K).sum()
return Y
X = torch.tensor([[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]])
K = torch.tensor([[0.0, 1.0], [2.0, 3.0]])
print(corr2d(X, K))tensor([[19., 25.],
[37., 43.]])实现二维卷积层(检测图像中不同颜色的边缘)
class Conv2D(nn.Module):
def __int__(self,kernel_size):
super().__int__()
self.weight=nn.Parameter(torch.range(kernel_size))
self.bias=nn.Parameter(torch.zeros(1))
def forward(self,x):
return corr2d(x,self.weight)+self.bias
X=torch.ones((6,8))
X[:,2:6]=0
print(X)
K=torch.tensor([[1.0,-1.0]])
Y=corr2d(X, K)
print(Y)
#卷积核k只可以检测垂直边缘
print(corr2d(X.t(),K))tensor([[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.]])
tensor([[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.]])
tensor([[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.]])学习由X生成Y的卷积核
conv2d=nn.Conv2d(1,1,kernel_size=(1,2),bias=False)
X=X.reshape((1,1,6,8))
Y=Y.reshape((1,1,6,7))
for i in range(10):
Y_hat=conv2d(X)
l=(Y_hat-Y)**2
conv2d.zero_grad()
l.sum().backward()
conv2d.weight.data[:]-=3e-2*conv2d.weight.grad
if(i+1)%2==0:
print(f'batch {i+1},loss{l.sum():.3f}')
# 所学的卷积核的权重张量
print(conv2d.weight.data.reshape((1,2)))batch 2,loss11.545
batch 4,loss4.023
batch 6,loss1.530
batch 8,loss0.607
batch 10,loss0.245
tensor([[ 1.0442, -0.9339]])填充和步幅
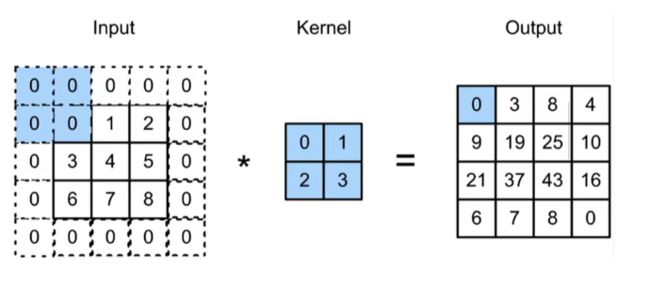
填充就是在输入周围添加额外的行/列,填充减小的输出大小与层数线性相关
步幅是指行/列的滑动步长
填充和步幅是卷积层的超参数。
填充在输入周围添加额外的行/列,来控制输出形状的减少量。
步幅是每次滑动核窗口时的行/列的步长,可以成倍的减少输出形状。
在所有侧边填充1个像素
def comp_conv2d(conv2d,X):
X=X.reshape((1,1)+X.shape)
Y=conv2d(X)
return Y.reshape(Y.shape[2:])
conv2d=nn.Conv2d(1,1,kernel_size=3,padding=1)
X=torch.rand(size=(8,8))
print(comp_conv2d(conv2d,X).shape)
#填充不同的高度和宽度
conv2d=nn.Conv2d(1,1,kernel_size=(5,3),padding=(2,1))
print(comp_conv2d(conv2d,X).shape)torch.Size([8, 8])
torch.Size([8, 8])将高度和宽度的步幅设置为2
conv2d=nn.Conv2d(1,1,kernel_size=3,padding=1,stride=2)
print(comp_conv2d(conv2d,X).shape)torch.Size([4, 4])一个稍微复杂的例子
conv2d=nn.Conv2d(1,1,kernel_size=(3,5),padding=(0,1),stride=(3,4))
print(comp_conv2d(conv2d,X).shape)torch.Size([2, 2])