与蜂窝连接的无人机的空地干扰缓解
Aerial-Ground Interference Mitigation for Cellular-Connected UAV
W. Mei and R. Zhang, “Aerial-Ground Interference Mitigation for Cellular-Connected UAV,” in IEEE Wireless Communications, vol. 28, no. 1, pp. 167-173, February 2021, doi: 10.1109/MWC.001.2000173.
这里写目录标题
- abstract
- Introduction
-
- Dynamic Frequency Reuse and Terrestrial ICIC
- Coordinated Multipoint (comp) Processing
- Non-Orthogonal Multiple Access (NOMA)
- Multi-User Multi-Inout Multi-Outout (MU-MIMO)
- Aerial-Ground Interference Mitigation Solutions
-
- RB Allocation Strategies
- UAV Sensing-Assisted ICIC
-
- cooperative interference cancellation (CIC)
- Cooperative Interference Cancellation (CIC)
-
- uplink CIC
-
- 多无人机
- 上行链路合作干扰消除和上行NOMA的解码位置不同
- 上行链路合作干扰消除比CoMP的信令开销小且解码难度低
- Downlink CIC
-
- 右边
- 左边
- 多无人机
- 下行链路合作干扰消除和下行NOMA的解码不同
- 下行链路合作干扰消除比CoMP的复杂度低
- Exploiting UAV Beamforming
-
- 无人机感知辅助的ICIC
- 合作干扰消除
- Interference-Aware UAV Trajectory Design
- 总结
- Simulation Results and Discussion
- Conclusions
abstract
为了支持未来无人机(UAV)的大规模部署,一种新的无线通信范式,即与蜂窝连接的无人机,最近在学术界和工业界引起了热潮。
具体来说,蜂窝基站 (BS) 和频谱被重新用于为无人机提供服务,作为新的空中用户设备 (UE),以满足其通信需求。
然而,与传统的地面 UE 相比,UAV 的高海拔导致更频繁的视距 (LoS) 信道,其关联和非关联 BS 在更广泛的区域内,这会对无人机和地面 UE 造成更强的空地干扰。
因此,为减轻地面干扰而设计的传统技术在应对新的和更严重的无人机地面干扰方面变得无效。
为了应对这一挑战,我们在本文中提出了新的干扰缓解解决方案,以实现蜂窝网络与共存 UAV 和地面 UE 的频谱高效运行。
特别是,我们利用网络中无人机和非活动基站的强大感知能力来缓解/消除干扰。
给出的数值结果验证了所提出的解决方案的有效性,并显示了它们相对于地面干扰缓解技术的显着频谱效率增益。
Introduction
在过去十年中,无人驾驶飞行器 (UAV)(又称无人机)的普及迅速增加,预计未来将刺激更多的使用。
最近的研究预计,到 2029 年,全球商用无人机市场规模将增加两倍,达到 140 亿美元。
这主要归因于无人机比以往任何时候都更容易被民用用户使用,这要归功于无人机成本的稳步下降和便携性的提高。
预计无人机将在多种新应用中得到更广泛的使用,例如数据包传输、视频监控、仓储和库存、通信平台等。
然而,不断扩大的无人机市场反过来对无人机的通信性能提出了更严格的要求 [1],
以确保它们的超可靠控制和非有效载荷通信(CNPC),并支持它们的大容量有效载荷通信,例如高清视频流。
然而,当今的大多数商用无人机仍然依赖于与其相关的地面飞行员进行简单的直接点对点通信,这通常仅限于视觉或无线电视距 (LoS) 范围。
因此,学术界和工业界最近都在研究一种新的范式,即与蜂窝连接的无人机 [2],
除了传统的地面 UE 之外,通过重用现有的蜂窝基站 (BS) 和频谱将无人机作为新的空中用户设备 (UE) 服务。
通过利用先进和发达的蜂窝技术,可以实现CNPC和无人机的有效载荷通信要求。
事实上,初步的现场试验表明,当前的第四代(4G)长期演进(LTE)网络已经能够满足无人机与地面通信的一些基本要求[3]。
尽管如此,小区间干扰(ICI)已被确定为实现频谱高效的与蜂窝连接的无人机通信的主要障碍[2]-[4]。
由于 UAV 的高海拔,与地面 UE 相比,它们通常具有更频繁的 LoS 信道和大量地面 BS,无论它们是服务于 UAV 还是地面 UE。
结果,与传统的地面 ICI 相比,出现了更严重和复杂的干扰问题,其中包括空地干扰(无人机和同信道地面通信之间)和无人机间干扰(同信道无人机通信之间),如图1所示,在上行链路(UAV-to-BS)和下行链路(BS-to-UAV)通信中。
因此,如何有效解决这两种干扰对于实现频谱高效的无人机-蜂窝集成至关重要。

与蜂窝连接的无人机通信会受到空中-地面以及无人机间的干扰,
Dt 典型地面 UE 的信号覆盖(或所需小区间干扰协调 (ICIC))区域
Du 典型无人机的信号覆盖(或所需小区间干扰协调 (ICIC))区域
另一方面,值得注意的是,无人机和地面基站之间存在视距链路也为干扰缓解带来了优势。
首先,这导致每个 UAV 与其相关 BS 之间的通信链路比地面链路更可靠,后者通常会经历更严重的路径损耗、阴影和多路径衰落。
此外,LoS 信道还使 UAV 可以连接到更多的 BS,从而在 UAV 小区关联和用于干扰消除的 BS 协作处理中产生更高的宏分集增益。
例如,如图 1 所示,无人机可以与许多地面基站可靠地交换关键控制信息,以促进它们的小区间干扰协调 (ICIC) [5]。
具体来说,每个 UAV 可以利用其可靠的上行链路控制信道向 Du 中的所有其他 BS 广播由其服务 BS 分配给它的资源块 (RB) 的索引,这样他们就不会将这些 RB 分配给他们服务的 UAV,从而避免 UAV 在上行链路和下行链路传输中的干扰。
[5] W. Mei, Q. Wu, and R. Zhang, “Cellular-connected UAV: Uplink association, power control and interference coordination,” IEEE Trans. Wireless Commun., vol. 18, no. 11, pp. 5380–5393, Nov. 2019.
然而,与地面干扰和无人机间干扰相比,地空干扰更难以缓解。
请注意,这种干扰问题不能简单地通过只为 UAV 分配不被任何地面 UE 使用的 RB 来解决。
这是因为在这种情况下,无人机可用的 RB 数量将非常有限,甚至很可能为零,这是由于当今蜂窝网络中地面 UE 的密集频率重用,并且它们当前的数量大大超过了无人机。
此外,现有的地面 ICI 缓解技术在处理更严重的空地干扰方面存在局限性,详细说明如下。
Dynamic Frequency Reuse and Terrestrial ICIC
在地面网络中,相邻基站之间通过高速回程链路(例如 LTE 中的 X2 接口)共享控制信息,以动态地将 RB 分配给其服务的 UE,从而避免 ICI。
由于地面信道上的路径损耗很大,因此这种 ICIC 只需要涉及本地区域中的几个 BS(图 1 中的 Dt)即可交换信息。
然而,当这种技术(称为地面 ICIC)应用于 UAV 的服务 BS 时,会忽略 Dt 之外(但仍在 Du 中)的大量同信道 BS,从而在无人机和同频道地面通信之间造成严重的空地干扰。
Coordinated Multipoint (comp) Processing
在 CoMP 中,相邻 BS 虚拟形成一个大型分布式天线系统,通过回程链路共享 UE 消息/信号,以在下行链路/上行链路通信中联合预编码/解码,从而增强地面 ICIC 的干扰抑制[6]。
虽然大规模 CoMP 可以通过让 Du 中的所有 BS 同时协作服务地面 UE 和 UAV 来令人满意地解决空地干扰问题,但是与仅用于地面 UE 的在每个本地区域 Dt 中应用的传统 CoMP 相比,它需要涉及更多的 BS,从而大大增加了 BS 处的处理复杂度/延迟和信号交换开销。
In CoMP, adjacent BSs virtually form a large distributed antenna system by sharing the UE messages/signals via the backhaul links for jointly precoding/decoding in the downlink/uplink communication, thus enhancing the interference mitigation over the terrestrial ICIC [6].
While large-scale CoMP can satisfactorily resolve the aerial-ground interference issue by engaging all BSs in Du to cooperatively serve terrestrial UEs and UAVs simultaneously, it requires involving much more BSs as compared to the conventional CoMP applied in each local region Dt for terrestrial UEs only, thus greatly increasing the processing complexity/delay and signal exchange overhead at the BSs.
Non-Orthogonal Multiple Access (NOMA)
乍一看,应用 NOMA 通过连续干扰消除 (SIC) 来消除空地干扰是一种很有吸引力的方法,因为 UAV 和地面 UE 与地面 BS 之间的高度不对称(LoS 与非 LoS (NLoS))信道类似于地面 NOMA [7] 中理想的远近场景
其中,BS 附近的 UE 比远处的 UE 具有更强的信道,因此在下行链路/上行链路 NOMA 中解码其他 UE 的消息之前,可以有效地应用 SIC 来解码远/近 UE 的消息。
然而,由于 Du 地区存在大量同频基站,
UAV 在上行链路 NOMA 中的可实现速率将受到与其信道条件最差的同信道 BS 的严重限制(因为可以在通过 SIC 解码地面 UE 的信号之前在同信道 BS 处冻结其信号);
而在下行NOMA中,每台无人机需要解码大量同信道地面UE的消息(在通过SIC解码自己的消息之前),这实际上是困难的,甚至是不可行的。
Multi-User Multi-Inout Multi-Outout (MU-MIMO)
使用 MU-MIMO,通过在空间域中分离它们的信号,多个地面 UE 可以在相同的时频 RB 中由多天线 BS 服务。
然而,在当前的 4G LTE 网络中,MU-MIMO 主要在水平(方位)维度实现,而在仰角域的空间干扰抑制能力非常有限[2],
因为实际的基站通常配备有固定下倾角的定向天线。
例如,如图 1 所示,BS 可以同时使用相同频率的两个波束为两个具有不同水平角的地面 UE 服务。
然而,它无法将每个地面 UE 的信号与高空无人机的信号分开,即使它们的仰角差异很大。
综上所述,传统的地面网络干扰抑制技术不足以应对更具挑战性的空地干扰问题,这促使本文提出新的、更有效的解决方案。
特别是,本文重点介绍了可以在当前蜂窝网络中实施的新解决方案,而无需显着改变其基础设施(例如,为所有 BS 配备全数字三维 (3D) 大规模 MIMO [8] ),通过利用无人机在网络中的感知和空闲 BS 进行 ICIC。
Aerial-Ground Interference Mitigation Solutions
在本节中,我们提出了各种解决方案来解决新的无人机地面干扰问题。
为说明起见,我们假设同一区域的 UAV 被分配到正交 RB 中,用于与其关联的 BS 通信,因此不存在 UAV 间干扰。
因此,我们可以专注于处理网络中的无人机地面干扰。
RB Allocation Strategies
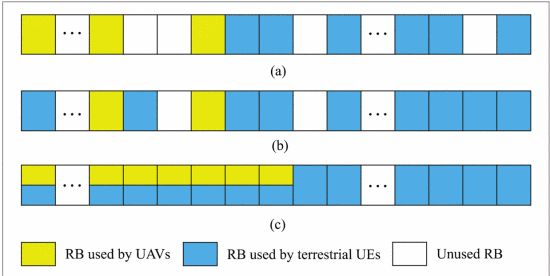
RB allocation strategies for terrestrial UEs and UAVs:
a) part of RBs reserved for UAV’s exclusive use;
b) terrestrial UEs allowed to use UAV reserved RBs opportunistically;
c) RBs allowed to be used by UAVsand terrestrial UEs simultaneously.
无人机是主要用户
地面用户是次要用户
- 当给定区域的无人机数量较少或中等时,避免空地干扰的直接解决方案是保留一小部分蜂窝RB供其专用,无论它们是否存在,如图 2a 所示。
然而,由于现有蜂窝网络中的密集频率复用,这将导致地面通信的巨大频谱效率损失,因为这些预留的RB不能被所有小区中的地面UE使用。
此外,未来为无人机预留的RB比例需要随着无人机数量的增加而增加,从而导致更多的频谱效率损失。 - 一种改进的解决方案可能是允许地面 UE 机会性地访问为 UAV 保留的 RB [9],即当它们不存在时(图 2b)。
然而,只要新 UAV 请求通信并将其分配的 RB 的索引广播给地面 BS,所有使用这些 RB 的现有地面 UE 将需要立即撤离到其他可用的 RB。
因此,如果所有预留的 RB 都被 UAV 占用,并且地面 UE 密度高,则剩余的 RB 将不足以供地面 UE 使用,从而导致它们的速率较低。 - 另一方面,如果无人机密度高,预留的 RB 也不足以支持它们的通信。
在这种情况下,唯一可能的解决方案是 UAV 和地面 UE 在 UAV 预留甚至非预留 RB 上的频谱共享(图 2c),前提是它们的相互干扰可以得到有效缓解。
为此,我们在下一节中提出了各种解决方案。
UAV Sensing-Assisted ICIC
As shown in Fig. 1, the major limitation of conventional terrestrial ICIC for cellular-connected UAVs lies in that the UAV’s serving BS can only exchange RB allocation information with its adjacent BSs in D t Dt Dt, but has no knowledge about the RB allocations in other cells in the much larger region D u Du Du.
However, such knowledge is difficult to obtain at the UAV’s serving BS, unless there is a global information exchange among all the BSs in D u Du Du, which is practically costly to implement.
Fortunately, the UAV’s LoS-dominant channel with the terrestrial BSs and UEs endows it with a powerful spectrum sensing capability for detecting strong terrestrial signals over a much larger region than its serving BS.
By adopting the various spectrum sensing techniques designed for the cognitive radio (CR) network [9], each UAV can detect the transmissions of terrestrial BSs/UEs in a wide area of D u Du Du, thereby assisting its serving BS in RB allocation to avoid the interference with terrestrial communications.
下行链路:无人机的基站→无人机
无人机感知干扰,并帮助无人机的基站选择干扰小的RB
上行链路:无人机→无人机的基站
无人机感知干扰,如果干扰大,那么可能存在地面用户在发射信号
Specifically, in the downlink, the UAV may sense its received interference over the available RBs at its serving BS to help select low-interference RBs for maximizing its achievable rate,
whereas in the uplink, the UAV may sense the terrestrial UEs’ transmissions (and co-channel UAVs’ transmissions in the case with inter-UAV interference) in each available RB.
If the received power in an RB is high, then it is a good indication that there may exist terrestrial UEs transmitting over this RB in the cells outside D t Dt Dt but in D u Du Du.
Thus, the transmit power of the UAV in this RB should be kept low or even set to zero for avoiding its uplink interference with co-channel terrestrial uplink transmissions.
Note that the above UAV sensing-assisted ICIC requires only local and distributed cooperation between the UAVs and their serving BSs, but significantly enlarges the interference coordination region as compared to the conventional terrestrial ICIC (i.e., D u Du Du versus D t Dt Dt in Fig. 1).
W. Mei and R. Zhang, “UAV-Sensing-Assisted Cellular Interference Coordination: A Cognitive Radio Approach,” in IEEE Wireless Communications Letters, vol. 9, no. 6, pp. 799-803, June 2020, doi: 10.1109/LWC.2020.2970416.
cooperative interference cancellation (CIC)
- Although the UAV sensing-assisted ICIC design can effectively avoid or reduce the aerial-ground interference, it treats interference simply as noise and thus the achievable rate for the UAV/co-channel terrestrial UEs may still be limited in the downlink and uplink communications, respectively.
the UAV sensing-assisted ICIC 将干扰视作噪声 - On the other hand, in each of the UAV’s assigned RB, there usually exist a large number of “idle” BSs adjacent to the UAV’s serving BS, which are not serving any terrestrial UEs due to the terrestrial ICIC applied in each local region ( D t Dt Dt in Fig. 1) and thus can be exploited for mitigating the UAV-ter-restrial interference.
通常存在大量的空闲基站临近无人机的服务基站
Motivated by the above, we further propose two new cooperative interference cancellation (CIC) schemes for the UAV uplink and downlink communications, respectively, to more effectively suppress the UAV-terrestrial interference, as shown in Fig. 3.
For ease of explanation, we assume that all channel powers are equal to one in Fig. 3.
Cooperative Interference Cancellation (CIC)

Proposed cooperative interference cancellation (CIC) schemes for cellular-connected UAVs:
a) uplink CIC;
- 无人机服务基站通过绿色虚线backhaul链路将解码后的无人机信号传给服务UE1的基站,用于消除红色链路的来自无人机的干扰
- 辅助基站通过绿色虚线backhaul链路将解码后的无人机信号传给服务UE2的基站,用于消除红色链路的来自无人机的干扰
- 辅助基站通过绿色虚线backhaul链路将量化后的无人机信号传给服务UE3的基站,用于消除红色链路的来自无人机的干扰
b) downlink CIC.
uplink CIC
除了无人机的服务BS之外,如果蜂窝网络中的一些空闲BS与无人机具有足够好的信道并且不在无人机的分配的RB中服务任何地面UE(因此,没有任何地面干扰),那么它们可以帮助解码上行链路中的无人机的信号。
As shown in Fig. 3a, in addition to the UAV’s serving BS, some of the idle BSs in the cellular network can help decode the UAV’s signal in the uplink if they have sufficiently good channels with the UAV and are not serving any terrestrial UEs (thus, free of any terrestrial interference) in the UAV’s assigned RBs.
The chance of finding a large number of such helping BSs is usually very high in practice thanks to the LoS-dominant UAV-BS channels as well as the conventional ICIC for terrestrial UEs which yields many “idle” BSs for any used RB in the network.
例如,每个区域Dt的所有外部BSs都不使用中心处的BS的相同RBs为ue服务,以减轻陆地ICI。
在解码无人机信号后,这些辅助基站可以利用基站之间高速可靠的回程链路(如X2链路),将解码后的无人机信号Su转发给相邻的甚至更远的基站(如果它们共享无人机的同一个RB,为地面终端服务)。
然后,这些同信道BSs可以在解码各自服务的地面UEs信号前取消Su(例如,图3a所示的St,1和St,2)。
与以前的无人机感知辅助ICIC相比,同信道BSs可以消除无人机的干扰,从而为上行链路的地面终端实现更高的速率。
For example, all the outer BSs in each region Dt do not use the same RBs of the BS in the center to serve UEs for mitigating terrestrial ICI.
After decoding the UAV’s signal, these helping BSs can forward the decoded UAV signal S u Su Su to their adjacent or even farther BSs if they are sharing the same RB of the UAV for serving terrestrial UEs, by exploiting the high-speed and reliable backhaul links (e.g., X2 links) among the BSs.
Then these co-channel BSs can cancel S u Su Su before decoding their respective served terrestrial UEs′ signals (e.g., S t , 1 St,1 St,1 and S t , 2 St,2 St,2 shown in Fig. 3a).
As compared to the previous UAV sensing-assisted ICIC, the co-channel BSs can remove the UAV’s interference, thus achieving higher rates for the terrestrial UEs in the uplink.
在实践中,一些辅助BSs可能没有足够的信噪比(SNR)在其接收器解码无人机的信号。
在这种情况下,如图3a所示,辅助BS可以对其接收到的无人机信号进行量化,并将量化后的信号suu转发给相邻的同信道BS,通过将辅助BS转发的信号与自身接收到的信号进行适当组合,消除无人机信号,然后再解码其服务的地面UE信号(St,3)(St,3)。
In practice, some helping BSs may not have sufficient signal-to-noise ratio (SNR) at their receivers to decode the UAV’s signal.
In this case, as shown in Fig. 3a, the helping BS can quantize its received UAV signal and forward the quantized signal, denoted by S u Su Su, to an adjacent co-channel BS, which then cancels the UAV’s signal by properly combining the forwarded signal from the helping BS and its own received signal before decoding its served terrestrial UE′s signal ( S t , 3 ) (St,3) (St,3).
多无人机
注意,这种方法也适用于多架干扰无人机的情况,其中每个同信道BS可以对转发的信号进行迫零合并,以消除无人机间的干扰。
Note that this approach is also applicable in the case of multiple interfering UAVs, where each co-channel BS can perform zero-forcing combining over the forwarded signals to eliminate the inter-UAV interference.
上行链路合作干扰消除和上行NOMA的解码位置不同
值得注意的是,上行链路合作干扰消除不同于地面终端的传统上行NOMA,因为无人机信号是在辅助BSs(不受地面干扰)上解码的,而不是通过SIC在每个同信道BSs(地面终端的信号被视为干扰)上解码的。
因此,在这些辅助BSs处的信噪比通常显著高于解码无人机信号的同信道BSs处的信噪比(SINRs);因此,上行链路合作干扰消除比上行NOMA可大大提高无人机的可达率。
一般来说,上行链路合作干扰消除可以与上行NOMA联合应用,以进一步提高无人机的速率性能,而不影响地面终端的速率,称为上行合作NOMA[10]。
It is worth noting that the uplink CIC is different from the conventional uplink NOMA for terrestrial UEs, as the UAV signal is decoded at the helping BSs (free of terrestrial interference) instead of each of the co-channel BSs via SIC (with the terrestrial UE’s signal treated as interference).
As a result, the SNRs at these helping BSs are generally significantly higher than the signal-to-interference-plus-noise ratios (SINRs) at the co-channel BSs for decoding the UAV’s signal; thus, uplink CIC can greatly improve the UAV’s achievable rate over uplink NOMA.
In general, uplink CIC can be jointly applied with uplink NOMA to further improve the UAV’s rate performance without compromising the terrestrial UEs’ rates, termed uplink cooperative NOMA [10].
上行链路合作干扰消除比CoMP的信令开销小且解码难度低
此外,上行链路合作干扰消除也不同于传统的CoMP解码,其中,所有无人机服务基站、同信道基站和空闲基站都需要通过回程链路共享接收到的信号,来共同解码无人机和地面终端的信号。
相比之下,在提议的上行链路合作干扰消除中,每个BS(无人机服务、同信道或空闲)独立处理接收到的信号,只有相邻的BSs需要共享无人机信号,从而大大降低了合作BSs处的回程信令开销和解码复杂性/延迟,相比于在Du中所有BSs上应用CoMP。
In addition, uplink CIC is also different from the conventional CoMP decoding, for which all the UAV serving, co-channel and idle BSs need to share their received signals via the backhaul links to jointly decode the signals of the UAV and terrestrial UEs.
In contrast, in the proposed uplink CIC, each BS (UAV serving, co-channel, or idle) processes the received signal independently and only adjacent BSs need to share the UAV signals, thus greatly reducing the backhaul signaling overhead and decoding complexity/delay at the cooperating BSs as compared to CoMP applied over all the BSs in D u Du Du.
[10] W. Mei and R. Zhang, “Uplink cooperative NOMA for cellularconnected UAV,” IEEE J. Sel. Topics Signal Process., vol. 13, no. 3, pp. 644–656, Jun. 2019.
Downlink CIC
- 右边:同信道基站通过回程链路将其服务的地面UE的消息共享给相邻的辅助基站,然后辅助BS发射叠加干扰,从而消除在无人机接收机处的这些同信道BSs(即St,1和St,2)发出的地面干扰信号。
- 左边:在右边的方式的基础上,无人机服务基站通过回程链路将无人机的信息Su共享到相邻的辅助基站,然后进行合作传输。
- 这2种方式都要优化信号分量的功率分配,以最大化无人机的信号功率,最小化对无人机接收机的地面干扰,即最大化无人机的接收SINR
右边
如图3b所示,为了消除下行链路上无人机接收器处的地面干扰,每个同信道BS通过回程链路将其服务的地面UE的消息共享给相邻的空闲(辅助)BS。
辅助基站可根据同信道地面终端的速率需求灵活选择。
例如,通过选择各同信道BS的Dt以外的BSs作为辅助BSs,其下行传输借助地面ICIC不会影响现有的地面通信,但可用于提高无人机的接收信噪比。
具体来说,辅助BS可以基于其相邻同信道BSs转发的信息(例如,图3b所示的−(St,1+St,2))发射叠加干扰,从而与无人机接收机上这些同信道BSs(即St,1和St,2)发出的地面干扰信号进行破坏性组合,以消除它们。
因此,UAV的可达速率可以在下行链路上与以前的UAV感知辅助ICIC相比显著提高。
As shown in Fig. 3b, to cancel the terrestrial interference at the UAV receiver in the downlink, each co-channel BS shares its served terrestrial UE’s message to its adjacent idle (helping) BSs via the backhaul links.
The helping BSs can be flexibly selected based on the rate requirement of co-channel terrestrial UEs.
For example, by selecting the BSs outside D t Dt Dt of each co-channel BS as helping BSs, their downlink transmission will not affect the existing terrestrial communications thanks to the terrestrial ICIC, but can be utilized to enhance the UAV’s receive SINR.
Specifically, the helping BS can transmit a superposed interference based on the messages forwarded by its adjacent co-channel BSs (e.g., − ( S t , 1 + S t , 2 ) −(St,1+St,2) −(St,1+St,2) shown in Fig. 3b), such that it is destructively combined with the terrestrial interference signals from these co-channel BSs (i.e., S t , 1 St,1 St,1 and S t , 2 St,2 St,2) at the UAV’s receiver to get them cancelled.
As a result, the UAV’s achievable rate can be significantly improved in the downlink compared to the previous UAV sensing-assisted ICIC.
值得注意的是,在实际操作中,由于辅助BS处功率有限,其发射干扰在无人机接收机处可能不足以完全抵消地面干扰;
因此,在辅助BS处分配给每个地面信号分量的发射功率需要优化,以使无人机的接收SINR[11]最大化。
It is worth noting that in practice, due to the limited power at the helping BS, its transmitted interference may not be sufficiently strong at the UAV’s receiver to cancel the terrestrial interference completely;
thus, the transmit powers allocated to each terrestrial signal component at the helping BS need to be optimized to maximize the UAV’s receive SINR [11].
[11] W. Mei and R. Zhang, “Cooperative downlink interference transmission and cancellation for cellular-connected UAV: A divide-and-conquer approach,” IEEE Trans. Commun., vol. 68, no. 2, pp. 1297–1311, Feb. 2020.
左边
为了进一步提高无人机的接收信噪比,无人机的信息Su也可以通过回程链路共享到相邻的辅助基站,然后进行合作传输,这样它们就可以与来自无人机服务基站的信号进行建设性结合,以最大限度地提高无人机接收机所需的信号功率。
To further enhance the UAV’s receive SINR, the UAV’s message S u Su Su can also be shared to the adjacent helping BSs via the backhaul links and then cooperatively transmitted, such that they are constructively combined with the signal from the UAV’s serving BS to maximize the desired signal power at the UAV’s receiver.
For example, as shown in Fig. 3b, the UAV’s serving BS shares S u Su Su to one adjacent helping BS, which then transmits the superposition of S u Su Su and the terrestrial UE’s signal S t , 3 St,3 St,3 forwarded by another co-channel BS;
as a result, at the UAV’s receiver, the desired UAV signal becomes 2 S u 2Su 2Su while the terrestrial interference S t , 3 St,3 St,3 is completely cancelled.
Again, due to the practically limited transmit power at the helping BS, there is an interesting trade-off between allocating the transmit powers over the desired signal and the interference (i.e., S u Su Su versus S t , 3 St,3 St,3 ) to balance between maximizing the UAV signal power and minimizing the terrestrial interference at the UAV’s receiver [11].
多无人机
Finally, this downlink CIC is also applicable if there exist multiple UAVs in the same RB, where the transmission of S u Su Su at the helping BS achieves a dual objective of enhancing the UAV’s desired signal and cancelling terrestrial interference from its aided BS to other co-channel UAVs.
下行链路合作干扰消除和下行NOMA的解码不同
注意,上面的下行CIC也不同于传统的下行NOMA,因为无人机接收器可以直接解码其消息而不执行SIC。
尽管如此,下行CIC可能与下行NOMA联合使用,其中一些辅助BSs可以合作传输地面干扰,使其与来自共通道BS的干扰相建设性结合,以最大限度地提高无人机接收机的干扰信号功率,在通过SIC解码无人机信号之前解码。
这为辅助BSs的信号功率分配提供了另一个有趣的目标。
Notice that the above downlink CIC is also different from the conventional downlink NOMA, as the UAV receiver can directly decode its message without performing SIC.
Nonetheless, downlink CIC may be used jointly with downlink NOMA, where some helping BSs can cooperatively transmit the terrestrial interference to make it constructively combined with that from the co-channel BS to maximize the interference signal power at the UAV’s receiver for decoding it prior to decoding the UAV’s signal via SIC.
This thus provides another interesting objective for the signal power allocations at the helping BSs.
下行链路合作干扰消除比CoMP的复杂度低
此外,与上行链路类似,下行CIC与传统的CoMP预编码不同,后者需要所有BSs(无人机服务、共信道和空闲)联合传输无人机和所有地面终端的信号,因此需要比我们提出的下行CIC更高的实现复杂度。
特别是,下行CIC中每个辅助BS的功率分配可以以分布式方式优化,只需要本地信息交换[11]。
因此,随着地面终端和无人机数量的增加,上行和下行CIC都是可扩展的。
Moreover, similar to the uplink, downlink CIC is different from the conventional CoMP precoding, which requires all BSs (UAV serving, co-channel, and idle) to jointly transmit the UAV’s and all terrestrial UEs’ signals, thus requiring substantially higher implementation complexity than our proposed downlink CIC.
In particular, the power allocation at each helping BS in the downlink CIC can be optimized in a distributed manner requiring only local information exchange [11].
Thus, both uplink and downlink CIC are scalable with an increasing number of terrestrial UEs and UAVs.
Exploiting UAV Beamforming
在无人机上利用波束成形可以帮助提高上述提出的干扰缓解解决方案的性能。
无人机感知辅助的ICIC
例如,在无人机感知辅助的ICIC中,无人机可以利用多个天线来学习关于感知地面传输的更精细和有用的信息[12]。
具体地说,多天线感知可以检测强地面传输的方向,并帮助无人机在其下行/上行通信中通过波束成形消除来自/到它们的干扰。
Exploiting beamforming at the UAV can help enhance the performance of the above proposed interference mitigation solutions.
For example, in the UAV sensing-assisted ICIC, the UAV can leverage multiple antennas to learn more refined and useful information about the sensed terrestrial transmissions [12].
Specifically, multi-antenna sensing can detect the directions of strong terrestrial transmissions and help the UAV in nulling the interference from/to them via beamforming in its downlink/uplink communication.
[12] R. Zhang, F. Gao, and Y.-C. Liang, “Cognitive beamforming made practical: Effective interference channel and learning-throughput tradeoff,” IEEE Trans. Commun., vol. 58, no. 2, pp. 706–718, Feb. 2010.
合作干扰消除
Besides, in the uplink CIC, in order for all helping BSs to decode the UAV’s signal, the design of UAV transmit beamforming is to maximize the UAV’s signal SNRs at these helping BSs [13], which resembles that of multicast beamforming for common information transmission to all the helping BSs.
It is worth noting that this approach is more effective than the conventional interference nulling at the UAV’s transmitter due to the large number of co-channel BSs but only a limited number of UAV antennas [13].
此外,在上行CIC中,为了使所有辅助基站都能解码无人机的信号,无人机发射波束成形的设计是使无人机在这些辅助基站[13]处的信号信噪比最大化,类似于向所有辅助基站进行公共信息传输的多播波束成形。
值得注意的是,由于无人机天线[13]数量有限,但同信道BSs数量较多,因此该方法比传统的无人机发射机干扰置零更有效。
[13] L. Liu, S. Zhang, and R. Zhang, “Multi-beam UAV communication in cellular uplink: Cooperative interference cancellation and sum-rate maximization,” IEEE Trans. Wireless Commun., vol. 18, no. 10, pp. 4679–4691, Oct. 2019.
最后,在下行链路CIC中,UAV可以对其在不同天线上接收的信号执行空间滤波,以增强其所需信号和/或消除残余同信道干扰,以最大化其SINR。
或者,在空间滤波强度足够强的情况下,如果下行NOMA和下行CIC联合应用,可以使用空间滤波来增强干扰,从而促进无人机的SIC。
Finally, in the downlink CIC, the UAV can perform spatial filtering over its received signals at different antennas to enhance its desired signal and/or null the residual co-channel interference to maximize its SINR.
Alternatively, spatial filtering can be used to enhance the interference if its strength is sufficiently strong, so as to facilitate the UAV’s SIC, if downlink NOMA and downlink CIC are jointly applied.
Interference-Aware UAV Trajectory Design

利用无人机轨迹设计减少干扰
[14] Y. Huang, W. Mei, J. Xu, L. Qiu, and R. Zhang, “Cognitive UAV communication via joint maneuver and power control,” IEEE Trans. Commun., vol. 67, no. 11, pp. 7872–7888, Nov. 2019.
由于无人机具有高度可控的三维机动性,无人机轨迹设计成为缓解上行和下行通信中空地干扰和无人机间干扰的新手段。
如图4所示,无人机轨迹可以灵活设计,在飞行方向上绕过或接近同信道BS,以避免其对同信道BS的干扰,甚至增强同信道BS,方便下/上行链路上无人机/同信道BS处的SIC抵消相应的空地干扰。
此外,无人机轨迹可以与无人机感知、波束成形和/或BSs的CIC等技术联合设计,进一步提高无人机对地干扰缓解性能。
Thanks to the high and controllable 3D mobility of UAVs, UAV trajectory design emerges as a new means for mitigating the aerial-ground and inter-UAV interference in both the uplink and downlink communications [14].
As shown in Fig. 4, the UAV trajectory can be flexibly designed to either bypass or approach the co-channel BS in its fly direction, so as to avoid its interference with this BS or even enhance it for facilitating the SIC at the UAV/co-channel BS in the downlink/uplink for cancelling the corresponding aerial-ground interference.
Moreover, UAV trajectory can be jointly designed with the previously proposed techniques such as UAV sensing, beamforming and/or BSs’ CIC to further enhance the UAV-ter-restrial interference mitigation performance.
总结
综上所述,在提出的干扰缓解解决方案中,无人机感知辅助的ICIC需要最低的开销,因为它只需要每架无人机和其服务BS之间的本地合作。
CIC可以通过让更多的BSs合作来进一步提高性能,同时产生更高的信令和信道估计开销。
最后,无人机波束成形和/或轨迹设计可以与上述解决方案相结合,以提高性能,但也会产生更多的开销。
To summarize, among the proposed interference mitigation solutions, UAV sensing-assisted ICIC requires the lowest overhead, as it requires only local cooperation between each UAV and its serving BS.
CIC can further improve the performance by engaging more BSs in cooperation, while incurring higher signaling and channel estimation overhead.
Finally, UAV beamforming and/or trajectory design can be combined with the above solutions for performance improvement but also incur more overhead.
Simulation Results and Discussion
In this section, numerical results are provided to demonstrate the efficacy of the proposed interference mitigation solutions.
The simulation settings are as follows.
The number of UAVs is set to 8.
We consider a chunk of the cellular spectrum comprising 10 RBs that may or may not be reserved for the UAVs.
Each UAV associates with the BS that has the smallest path-loss with it and is assigned with one RB for its downlink or uplink communication.
The bandwidth of each RB is 180 kHz.
The carrier frequency is 2 GHz, and the noise power spectrum density at the UAV/BS receiver is −164 dBm/Hz.
For the terrestrial channels, the path-loss and shadowing are modeled based on the urban macro (UMa) scenario in the 3GPP technical specification [15], while the small-scale fading is modeled as Rayleigh fading.
The cell radius is 800 m, and the height of BSs is set to be 25 m.
The altitude of the UAV is fixed as 200 m.
The BS antenna pattern is assumed to be omnidirectional in the horizontal plane but directional in the vertical plane with a 10-degree downtilt angle.
We consider three tiers of cells to cover Duin Fig. 1, and it can be shown that the total number of cells required is 37.
The UAVs’ and terrestrial UEs’ horizontal locations are both randomly generated in the 37 cells.
Following the probabilistic LoS channel model in the UMa scenario in [15], all channels between UAVs and terrestrial BSs/UEs are dominated by LoS propagation at the altitude of 200 m.
Each UAV or terrestrial UE is assumed to be equipped with a single omnidirectional antenna [15].
The transmit power for each BS or UE is set to be 20 dBm.
In Figs. 5 and 6, we show the spectrum efficiency performance in terms of the UAVs’ sum-rate, terrestrial UEs’ sum-rate, as well as the network sum-rate over the 10 RBs in the uplink and downlink, respectively, with different numbers of terrestrial UEs.
The following five schemes are considered for both uplink and downlink communications, namely:
- UAV’s exclusive spectrum access for the reserved 10 RBs (Fig. 2a).
- Opportunistic spectrum access where terrestrial UEs can use any of the 10 RBs if it is unused by all UAVs (Fig. 2b).
- Terrestrial ICIC where UAVs are treated the same as terrestrial UEs to access any of the 10 RBs.
- UAV sensing-assisted ICIC.
- Uplink/downlink CIC (termed as scheme 1 to 5 in the sequel for brevity).
In schemes- 1 and 2, each UAV broadcasts the index of its assigned RB to all BSs in Duto avoid inter-UAV interference.
In the terrestrial ICIC (scheme 3), each UAV’s serving BS also checks the RB allocation with its nearest neighboring BSs, and then randomly assigns its served UAV with an available RB (if any) that has not been used by them, as well as itself and other UAVs.
In contrast, in the UAV sensing-assisted ICIC (scheme 4), each UAV further performs spectrum sensing over all available RBs at its serving BS and is assigned with the RB with the lowest sensed power among them, while in the uplink/downlink CIC (scheme 5), after performing UAV spectrum sensing, each UAV’s serving BS/co-channel BS can forward the decoded UAV’s/ served terrestrial UE’s message to its nearest and second-nearest co-channel/idle BSs for interference cancellation.
From Fig. 5a, it is observed that with schemes 1 and 2, the UAVs’ sum-rate in the uplink is unaffected by the terrestrial UE number, since there is no spectrum sharing between UAVs and terrestrial UEs in these two schemes.
However, as observed from Fig. 5b, this severely limits the terrestrial UEs’ sum-rate.
In particular, in scheme 1, as the terrestrial UEs are not allowed to use any reserved RB for the UAVs, their sum-rate is zero.
In addition, it is observed from Fig. 5a that for schemes 3–5 that allow UAV-terrestrial spectrum sharing, the UAVs’ sum-rate in the uplink is almost unchanged with increasing the terrestrial UE number.
This is because the RB allocation in terrestrial ICIC has been sufficient to mitigate the terrestrial interference at the UAVs’ serving BSs.
As observed from Fig. 5b, scheme 4 yields a higher terrestrial UEs’ sum-rate than scheme 3, due to the enlarged ICIC region by UAV spectrum sensing, while scheme 5 leads to an even better performance than scheme 4, thanks to the uplink CIC.
Finally, it is observed from Fig. 5c that by allowing UAV-terrestrial spectrum sharing, the network sum-rate can be greatly improved as compared to that in scheme 1 or 2, since terrestrial UEs are allowed to use the same RBs as the UAVs and there are many more terrestrial UEs than UAVs in the considered network.
The proposed schemes 4 and 5 are also observed to outperform scheme 3 thanks to their more effective interference mitigation.
The above observations for the uplink are similarly made for the downlink as shown in Fig. 6.
In particular, it is observed from Fig. 6a that for schemes 3–5 with UAV/terrestrial UE spectrum sharing, the UAVs’ sum-rate decreases with the increasing terrestrial UE number, as this also increases the co-channel BS number and thus the terrestrial interference at the UAVs’ receivers.
Nonetheless, scheme 5 yields considerably better performance than the other two schemes thanks to the downlink CIC.
It follows from the above results that allowing spectrum sharing between UAVs and terrestrial UEs is an effective means to ensure their coexistence.
To address the resultant interference issue, the interference mitigation region should be effectively enlarged as compared to that in terrestrial ICIC.
To this end, UAVs may play a proactive role by leveraging their strong spectrum sensing capability.
Finally, idle BSs can be exploited as helping BSs to tackle the interference issue.
Conclusions
In this article, we introduce the new and severe aerial-ground interference issue arising from the cellular-connected UAV communications due to the LoS-dominant UAV-ground channels.
In view of the limitations of existing terrestrial interference mitigation techniques, we propose new and effective solutions based on the current cellular infrastructure.
Simulation results are provided to demonstrate the spectrum efficiency gains by the proposed solutions as compared to conventional techniques for terrestrial interference mitigation.
It is hoped that this article will serve as a stepping stone for the future investigation of spectral efficient interference mitigation techniques for cellu-lar-connected UAV communications.
在本文中,我们介绍了蜂窝连接无人机通信中由于LoS主导的无人机-地面信道而产生的新的严重的空中-地面干扰问题。
鉴于现有的地面干扰缓解技术的局限性,我们基于当前的蜂窝基础设施提出了新的和有效的解决方案。
仿真结果表明,与地面干扰减缓的常规技术相比,所提出的解决方案所获得的频谱效率提高。
希望这篇文章能成为未来研究蜂窝连接无人机通信频谱高效干扰缓解技术的一个跳板。
Allowing spectrum sharing between UAVs and terrestrial UEs is an effective means to ensure their coexistence.
To address the resultant interference issue, the interference mitigation region should be effectively enlarged as compared to that in terrestrial ICIC.
To this end, UAVs may play a proactive role by leveraging their strong spectrum sensing capability.
允许无人机与地面终端共享频谱是保证两者共存的有效手段。
为解决由此产生的干扰问题,应有效扩大与地面ICIC相比的干扰缓解区域。
为此,无人机可以利用其强大的频谱感知能力发挥积极作用。