MaskRCNN源码解析4:头网络(Networks Heads)解析
MaskRCNN源码解析1:整体结构概述
MaskRCNN源码解析2:特征图与anchors生成
MaskRCNN源码解析3:RPN、ProposalLayer、DetectionTargetLayer
MaskRCNN源码解析4-0:ROI Pooling 与 ROI Align理论
MaskRCNN源码解析4:头网络(Networks Heads)解析
MaskRCNN源码解析5:损失部分解析
目录
MaskRCNN概述:
C),头网络解析
1,PyramidROIAlign
2,fpn_classifier_graph()进行分类和回归操作
3,build_fpn_mask_graph()进行mask操作
MaskRCNN概述:
Mask R-CNN是一个小巧、灵活的通用对象实例分割框架(object instance segmentation)。它不仅可对图像中的目标进行检测,还可以对每一个目标给出一个高质量的分割结果。它在Faster R-CNN[1]基础之上进行扩展,并行地在bounding box recognition分支上添加一个用于预测目标掩模(object mask)的新分支。该网络还很容易扩展到其他任务中,比如估计人的姿势,也就是关键点识别(person keypoint detection)。该框架在COCO的一些列挑战任务重都取得了最好的结果,包括实例分割(instance segmentation)、候选框目标检测(bounding-box object detection)和人关键点检测(person keypoint detection)。
参考文章:
Mask RCNN 学习笔记
MaskRCNN源码解读
令人拍案称奇的Mask RCNN
论文笔记:Mask R-CNN
Mask R-CNN个人理解
解析源码地址:
https://github.com/matterport/Mask_RCNN
C),头网络解析
MaskRCNN里的3个最主要的操作:分类、回归、Mask 在头网络里进行,处理流程如下图所示:
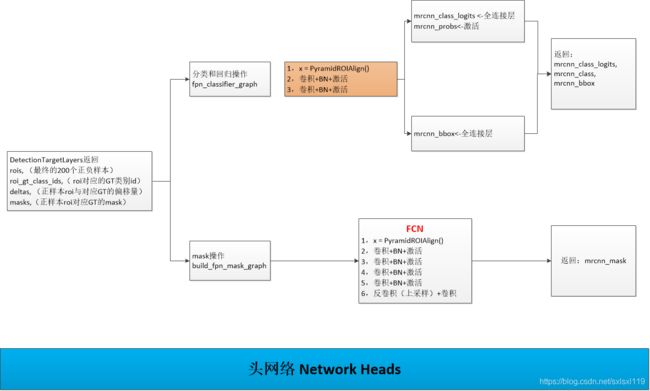
整体调用头网络代码,分成了2个小步分别进行,其中fpn_classifier_graph()进行分类和回归操作;build_fpn_mask_graph()进行mask操作。这两个操作中都用到了PyramidROIAlign,即论文里提高的改进点之一ROIAlign。
# *************************7,头网络 Network Heads********************************************************************
# Network Heads
# TODO: verify that this handles zero padded ROIs
# 分类和回归操作
mrcnn_class_logits, mrcnn_class, mrcnn_bbox =\
fpn_classifier_graph(rois, mrcnn_feature_maps, input_image_meta,
config.POOL_SIZE, config.NUM_CLASSES,
train_bn=config.TRAIN_BN,
fc_layers_size=config.FPN_CLASSIF_FC_LAYERS_SIZE)
# mask操作
mrcnn_mask = build_fpn_mask_graph(rois, mrcnn_feature_maps,
input_image_meta,
config.MASK_POOL_SIZE,
config.NUM_CLASSES,
train_bn=config.TRAIN_BN)
# TODO: clean up (use tf.identify if necessary)
output_rois = KL.Lambda(lambda x: x * 1, name="output_rois")(rois)1,PyramidROIAlign【需要详细解析一下】
这部分的理论解析与实例计算专门写了一篇文章,为了维持结构的整洁性,就不在这里贴理论的东西了,文章见:
MaskRCNN源码解析4-0:ROI Pooling 与 ROI Align理论
计算每一个roi来自于金字塔特征的P2到P5的哪一层特征的公式:

对于上面公式而言:w,h分别表示ROI宽度和高度;k是这个RoI应属于的特征层level;![]() 是w,h=224,224时映射的level,一般取为4,即对应着P4,至于为什么使用224,一般解释为是因为这是ImageNet的标准图片大小,比如现在有一个ROI是112*112,则利用公式可以计算得到k=3,即P3层。
是w,h=224,224时映射的level,一般取为4,即对应着P4,至于为什么使用224,一般解释为是因为这是ImageNet的标准图片大小,比如现在有一个ROI是112*112,则利用公式可以计算得到k=3,即P3层。
下面是ROIAlign的实现代码:
"""
Implements ROI Pooling on multiple levels of the feature pyramid.
在特征金字塔的多个级别上实现ROI池化。
Params:
- pool_shape: [pool_height, pool_width] of the output pooled regions. Usually [7, 7]
Inputs:
- boxes: [batch, num_boxes, (y1, x1, y2, x2)] in normalized
coordinates. Possibly padded with zeros if not enough
boxes to fill the array.
- image_meta: [batch, (meta data)] Image details. See compose_image_meta()
- feature_maps: List of feature maps from different levels of the pyramid.
Each is [batch, height, width, channels]
Output:
Pooled regions in the shape: [batch, num_boxes, pool_height, pool_width, channels].
The width and height are those specific in the pool_shape in the layer constructor.
"""
# PyramidROIAlign首先根据下面的公式计算每一个roi来自于金字塔特征的P2到P5的哪一层的特征:
# k=[k0+log2(sqrt(w*h)/244)],其中w,h分别表示boxes的宽度和高,k是分配ROI的level,k0是w,h=224,224时映射的level.
class PyramidROIAlign(KE.Layer):
def __init__(self, pool_shape, **kwargs):
super(PyramidROIAlign, self).__init__(**kwargs)
self.pool_shape = tuple(pool_shape)
def call(self, inputs):
# Crop boxes [batch, num_boxes, (y1, x1, y2, x2)] in normalized coords
boxes = inputs[0]
# Image meta
# Holds details about the image. See compose_image_meta()
image_meta = inputs[1]
# Feature Maps. List of feature maps from different level of the
# feature pyramid. Each is [batch, height, width, channels]
feature_maps = inputs[2:]
# Assign each ROI to a level in the pyramid based on the ROI area.
y1, x1, y2, x2 = tf.split(boxes, 4, axis=2)
h = y2 - y1
w = x2 - x1
# Use shape of first image. Images in a batch must have the same size.
image_shape = parse_image_meta_graph(image_meta)['image_shape'][0]
# Equation 1 in the Feature Pyramid Networks paper. Account for
# the fact that our coordinates are normalized here.
# e.g. a 224x224 ROI (in pixels) maps to P4
image_area = tf.cast(image_shape[0] * image_shape[1], tf.float32)
roi_level = log2_graph(tf.sqrt(h * w) / (224.0 / tf.sqrt(image_area)))
roi_level = tf.minimum(5, tf.maximum(
2, 4 + tf.cast(tf.round(roi_level), tf.int32)))
roi_level = tf.squeeze(roi_level, 2)
# Loop through levels and apply ROI pooling to each. P2 to P5.
pooled = []
box_to_level = []
for i, level in enumerate(range(2, 6)):
ix = tf.where(tf.equal(roi_level, level))
level_boxes = tf.gather_nd(boxes, ix)
# Box indices for crop_and_resize.
box_indices = tf.cast(ix[:, 0], tf.int32)
# Keep track of which box is mapped to which level
box_to_level.append(ix)
# Stop gradient propogation to ROI proposals
level_boxes = tf.stop_gradient(level_boxes)
box_indices = tf.stop_gradient(box_indices)
# Crop and Resize
# From Mask R-CNN paper: "We sample four regular locations, so
# that we can evaluate either max or average pooling. In fact,
# interpolating only a single value at each bin center (without
# pooling) is nearly as effective."
#
# Here we use the simplified approach of a single value per bin,
# which is how it's done in tf.crop_and_resize()
# Result: [batch * num_boxes, pool_height, pool_width, channels]
pooled.append(tf.image.crop_and_resize(
feature_maps[i], level_boxes, box_indices, self.pool_shape,
method="bilinear"))
# Pack pooled features into one tensor
pooled = tf.concat(pooled, axis=0)
# Pack box_to_level mapping into one array and add another
# column representing the order of pooled boxes
box_to_level = tf.concat(box_to_level, axis=0)
box_range = tf.expand_dims(tf.range(tf.shape(box_to_level)[0]), 1)
box_to_level = tf.concat([tf.cast(box_to_level, tf.int32), box_range],
axis=1)
# Rearrange pooled features to match the order of the original boxes
# Sort box_to_level by batch then box index
# TF doesn't have a way to sort by two columns, so merge them and sort.
sorting_tensor = box_to_level[:, 0] * 100000 + box_to_level[:, 1]
ix = tf.nn.top_k(sorting_tensor, k=tf.shape(
box_to_level)[0]).indices[::-1]
ix = tf.gather(box_to_level[:, 2], ix)
pooled = tf.gather(pooled, ix)
# Re-add the batch dimension
shape = tf.concat([tf.shape(boxes)[:2], tf.shape(pooled)[1:]], axis=0)
pooled = tf.reshape(pooled, shape)
return pooled
def compute_output_shape(self, input_shape):
return input_shape[0][:2] + self.pool_shape + (input_shape[2][-1], )
2,fpn_classifier_graph()进行分类和回归操作
该部分是分类和回归的分支
输入参数:
- rois: [batch, num_rois, (y1, x1, y2, x2)] Proposal boxes in normalized coordinates. 归一化坐标
- feature_maps: List of feature maps from different layers of the pyramid,[P2, P3, P4, P5]. Each has a different resolution. 每个都有不同的分辨率。
- image_meta: [batch, (meta data)] Image details. See compose_image_meta() 1+3+3+4+1+80=92
- pool_size: The width of the square feature map generated from ROI Pooling. 由ROI合并生成的方形特征图的宽度。
- num_classes: number of classes, which determines the depth of the results 类的数量,它决定结果的深度
- train_bn: Boolean. Train or freeze Batch Norm layers
- fc_layers_size: Size of the 2 FC layers 全连接层大小
返回值:
- logits: [batch, num_rois, NUM_CLASSES] classifier logits (before softmax) 分类器logits(在softmax之前)
- probs: [batch, num_rois, NUM_CLASSES] classifier probabilities 分类器概率
- bbox_deltas: [batch, num_rois, NUM_CLASSES, (dy, dx, log(dh), log(dw))] Deltas to apply to
- proposal boxes 预选框的偏移量
PyramidROIAlign首先根据下面的公式计算每一个roi来自于金字塔特征的P2到P5的哪一层的特征:
k=[k0+log2(sqrt(w*h)/244)],其中w,h分别表示boxes的宽度和高,k是分配ROI的level,k0是w,h=224,224时映射的level.然后从对应的特征图中取出坐标对应的区域,利用双线性插值的方式进行pooling操作。最后返回resize成相同大小的rois。
有一个细节需要注意的就是此处PyramidROIAlign得到的特征图是7 * 7大小的, 经过build_fpn_mask_graph()PyramidROIAlign得到的特征图大小是14 * 14。
下面是具体的实现代码:
"""
分类和回归
Builds the computation graph of the feature pyramid network classifier and regressor heads.
建立特征金字塔网络分类器的计算图和回归头。
rois: [batch, num_rois, (y1, x1, y2, x2)] Proposal boxes in normalized coordinates. 归一化坐标
feature_maps: List of feature maps from different layers of the pyramid,
[P2, P3, P4, P5]. Each has a different resolution. 每个都有不同的分辨率。
image_meta: [batch, (meta data)] Image details. See compose_image_meta()
pool_size: The width of the square feature map generated from ROI Pooling. 由ROI合并生成的方形特征图的宽度。
num_classes: number of classes, which determines the depth of the results 类的数量,它决定结果的深度
train_bn: Boolean. Train or freeze Batch Norm layers
fc_layers_size: Size of the 2 FC layers 全连接层大小
Returns:
logits: [batch, num_rois, NUM_CLASSES] classifier logits (before softmax) 分类器logits(在softmax之前)
probs: [batch, num_rois, NUM_CLASSES] classifier probabilities 分类器概率
bbox_deltas: [batch, num_rois, NUM_CLASSES, (dy, dx, log(dh), log(dw))] Deltas to apply to
proposal boxes 预选框的偏移量
"""
def fpn_classifier_graph(rois, feature_maps, image_meta,
pool_size, num_classes, train_bn=True,
fc_layers_size=1024):
# ROI Pooling
# Shape: [batch, num_rois, POOL_SIZE, POOL_SIZE, channels]
# PyramidROIAlign首先根据下面的公式计算每一个roi来自于金字塔特征的P2到P5的哪一层的特征:
# k=[k0+log2(sqrt(w*h)/244)],其中w,h分别表示boxes的宽度和高,k是分配ROI的level,k0是
# w,h=224,224时映射的level.
# 然后从对应的特征图中取出坐标对应的区域,利用双线性插值的方式进行pooling操作。
# 最后返回resize成相同大小的rois。
# 有一个细节需要注意的就是此处PyramidROIAlign得到的特征图是7 * 7大小的,
# 经过build_fpn_mask_graph()PyramidROIAlign得到的特征图大小是14 * 14
x = PyramidROIAlign([pool_size, pool_size], # *****
name="roi_align_classifier")([rois, image_meta] + feature_maps)
# Two 1024 FC layers (implemented with Conv2D for consistency)
# TimeDistributed的真正意义在于使不同层的特征图共享权重
x = KL.TimeDistributed(KL.Conv2D(fc_layers_size, (pool_size, pool_size), padding="valid"), # 卷积
name="mrcnn_class_conv1")(x)
x = KL.TimeDistributed(BatchNorm(), name='mrcnn_class_bn1')(x, training=train_bn) # BN
x = KL.Activation('relu')(x) # 激活
x = KL.TimeDistributed(KL.Conv2D(fc_layers_size, (1, 1)), name="mrcnn_class_conv2")(x) # 卷积
x = KL.TimeDistributed(BatchNorm(), name='mrcnn_class_bn2')(x, training=train_bn) # BN
x = KL.Activation('relu')(x) # 激活
shared = KL.Lambda(lambda x: K.squeeze(K.squeeze(x, 3), 2),
name="pool_squeeze")(x)
# Classifier head
mrcnn_class_logits = KL.TimeDistributed(KL.Dense(num_classes), name='mrcnn_class_logits')(shared) # 全连接层
mrcnn_probs = KL.TimeDistributed(KL.Activation("softmax"), name="mrcnn_class")(mrcnn_class_logits) # 激活
# BBox head
# [batch, num_rois, NUM_CLASSES * (dy, dx, log(dh), log(dw))]
x = KL.TimeDistributed(KL.Dense(num_classes * 4, activation='linear'),name='mrcnn_bbox_fc')(shared) # 全连接层
# Reshape to [batch, num_rois, NUM_CLASSES, (dy, dx, log(dh), log(dw))]
s = K.int_shape(x)
mrcnn_bbox = KL.Reshape((s[1], num_classes, 4), name="mrcnn_bbox")(x)
return mrcnn_class_logits, mrcnn_probs, mrcnn_bbox3,build_fpn_mask_graph()进行mask操作 【FCN需要详细解析一下】
全卷积网络 FCN 详解
"""
Mask
Builds the computation graph of the mask head of Feature Pyramid Network.
rois: [batch, num_rois, (y1, x1, y2, x2)] Proposal boxes in normalized
coordinates.
feature_maps: List of feature maps from different layers of the pyramid,
[P2, P3, P4, P5]. Each has a different resolution.
image_meta: [batch, (meta data)] Image details. See compose_image_meta()
pool_size: The width of the square feature map generated from ROI Pooling.
num_classes: number of classes, which determines the depth of the results
train_bn: Boolean. Train or freeze Batch Norm layers
Returns: Masks [batch, num_rois, MASK_POOL_SIZE, MASK_POOL_SIZE, NUM_CLASSES]
"""
def build_fpn_mask_graph(rois, feature_maps, image_meta,
pool_size, num_classes, train_bn=True):
# ROI Pooling
# Shape: [batch, num_rois, MASK_POOL_SIZE, MASK_POOL_SIZE, channels]
# 有一个细节需要注意的就是此处PyramidROIAlign得到的特征图是7 * 7大小的,
# 经过build_fpn_mask_graph()PyramidROIAlign得到的特征图大小是14 * 14
x = PyramidROIAlign([pool_size, pool_size],
name="roi_align_mask")([rois, image_meta] + feature_maps)
# Conv layers
x = KL.TimeDistributed(KL.Conv2D(256, (3, 3), padding="same"), name="mrcnn_mask_conv1")(x) # 卷积
x = KL.TimeDistributed(BatchNorm(), name='mrcnn_mask_bn1')(x, training=train_bn) # BN
x = KL.Activation('relu')(x) # 激活
x = KL.TimeDistributed(KL.Conv2D(256, (3, 3), padding="same"), name="mrcnn_mask_conv2")(x) # 卷积
x = KL.TimeDistributed(BatchNorm(), name='mrcnn_mask_bn2')(x, training=train_bn) # BN
x = KL.Activation('relu')(x) # 激活
x = KL.TimeDistributed(KL.Conv2D(256, (3, 3), padding="same"),name="mrcnn_mask_conv3")(x) # 卷积
x = KL.TimeDistributed(BatchNorm(),name='mrcnn_mask_bn3')(x, training=train_bn) # BN
x = KL.Activation('relu')(x) # 激活
x = KL.TimeDistributed(KL.Conv2D(256, (3, 3), padding="same"),name="mrcnn_mask_conv4")(x) # 卷积
x = KL.TimeDistributed(BatchNorm(),name='mrcnn_mask_bn4')(x, training=train_bn) # BN
x = KL.Activation('relu')(x) # 激活
x = KL.TimeDistributed(KL.Conv2DTranspose(256, (2, 2), strides=2, activation="relu"), # 反卷积上采样
name="mrcnn_mask_deconv")(x)
x = KL.TimeDistributed(KL.Conv2D(num_classes, (1, 1), strides=1, activation="sigmoid"), # 卷积
name="mrcnn_mask")(x)
return x
