卡尔曼滤波器(Kalman Filter,KF)算法及仿真
在python下完成卡尔曼滤波的模拟采样与迭代
文章目录
- 卡尔曼滤波器(Kalman Filter,KF)算法及仿真
- 1. 贝叶斯滤波器
-
- 2. 卡尔曼滤波
- 3.1 仿真模型
-
- 3.1.1 问题描述
- 3.1.2 运动模型
- 3.1.3 测量模型
- 3.2 仿真实验设计
-
- 3.2.1 采样函数
-
- a) 正态分布/高斯分布
- 3.2.2 运动采样
- 3.2.3 测量采样
- 3.2.4 生成控制序列
- 3.2.5 根据控制序列生成无滤波的状态估计
- 3.2.6 通过采样获得Ground Truth状态
- 3.2.7 根据Ground-Truth状态来生成测量的采样数据
- 3.2.8 利用Kalman Filter进行滤波
卡尔曼滤波器(Kalman Filter,KF)算法及仿真
参考链接 我的大学老师刘二大人
刘二大人永远的神
github工程如下 : 点我
提示:以下是本篇文章正文内容,下面案例可供参考
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
1. 贝叶斯滤波器
贝叶斯滤波器的算法如下所示:
1:Algorithm Bayes_filter ( b e l ( x t − 1 ) , u t , z t ) (bel(x_{t-1}), u_t, z_t) (bel(xt−1),ut,zt):
2: for all x t x_t xt do
3: b e l ‾ ( x t ) = ∫ p ( x t ∣ u t , x t − 1 ) b e l ( x t − 1 ) d x t − 1 \overline {bel}(x_t) = \int p(x_t \, | \, u_t, x_{t-1})bel(x_{t-1})dx_{t-1} bel(xt)=∫p(xt∣ut,xt−1)bel(xt−1)dxt−1
4: b e l ( x t ) = η p ( z t ∣ x t ) b e l ‾ ( x t ) bel(x_t)=\eta p ( z_t | x_t) \overline {bel}(x_t) bel(xt)=ηp(zt∣xt)bel(xt)
5: end for
6: return b e l ( x t ) bel(x_t) bel(xt)
贝叶斯滤波的生成模型也被称为隐马尔科夫模型(Hidden Markov Model,HMM)或动态贝叶斯网络(Dynamic Bayes Network, DBN)。
对于离散有限的状态空间,可以用所有可能状态的概率值来表示置信度。但是如果状态空间是无限或连续,则置信度难以表示。
通常有两种置信度的表示方法:
- 用多元正态分布来表示置信度。对应的滤波算法被称统称为高斯滤波(Gaussian Filter)。
- 用粒子集来表示置信度。对应的滤波算法被称为粒子滤波(Particle Filter)。
2. 卡尔曼滤波
KF算法用矩来定义置信度,可以对连续状态的置信度进行计算,但是不适用于离散状态空间和混合状态空间。
1:Algorithm Kalman_filter ( μ t − 1 , Σ t − 1 , u t , z t ) ( \mu_{t-1}, \Sigma_{t-1}, u_t, z_t ) (μt−1,Σt−1,ut,zt):
2: μ ‾ t = A t μ t − 1 + B t u t \overline \mu_t = A_t \mu_{t-1} + B_t u_t μt=Atμt−1+Btut
3: Σ ‾ t = A t Σ t − 1 A t T + R t \overline \Sigma_t = A_t \Sigma_{t-1}A_t^T + R_t Σt=AtΣt−1AtT+Rt
4: K t = Σ ‾ t C t T ( C t Σ ‾ t C t T + Q t ) − 1 K_t = \overline \Sigma_t C_t^T ( C_t \overline \Sigma_t C_t^T + Q_t)^{-1} Kt=ΣtCtT(CtΣtCtT+Qt)−1
5: μ t = μ ‾ t + K t ( z t − C t μ ‾ t ) \mu_t = \overline \mu_t + K_t (z_t - C_t \overline \mu_t) μt=μt+Kt(zt−Ctμt)
6: Σ t = ( I − K t C t ) Σ ‾ t \Sigma_t = (I - K_t C_t) \overline \Sigma_t Σt=(I−KtCt)Σt
7: return μ t , Σ t {\mu_t, \Sigma_t} μt,Σt
# 3. Kalman Filter仿真
3.1 仿真模型
3.1.1 问题描述
假设有一个沿直线运动的机器人,每隔一个时间间隔 △ t \vartriangle t △t,根据运动 u t u_t ut对自己当前的状态进行预测(Predict),然后利用传感器获得的测量 z t z_t zt对自己的状态进行更新(Update)。
定义机器人的状态 x t = [ p t v t ] x_t = \begin{bmatrix}p_t \\ v_t \end{bmatrix} xt=[ptvt],其中 p t p_t pt表示机器人的位置, v t v_t vt表示机器人的速度。
3.1.2 运动模型
假设机器人可以控制其加速度 a a a,则运动迁移方程可以写为:
KaTeX parse error: No such environment: align at position 7: \begin{̲a̲l̲i̲g̲n̲}̲ p_t &= p_{t-1}…
把该方程改写为线性方程,可得:
KaTeX parse error: No such environment: align at position 7: \begin{̲a̲l̲i̲g̲n̲}̲ x_t &= \begin{…
其中 ε t \varepsilon_t εt是控制带来的噪声,假设加速度 a a a包含有一个 ∼ N ( μ , σ a 2 ) \sim N(\mu , \sigma_a^2) ∼N(μ,σa2)的一个噪声。因此该噪声对机器人状态 x t x_t xt带来的噪声可表示为:$ noise_u \sim N(\mu , R_t) , 其 中 ,其中 ,其中\mu = (0, 0)^T , , ,R_t = \begin{bmatrix} ({\frac 12 \triangle t2})2 & 0 \ 0 & ({\triangle t})^2 \end{bmatrix} \sigma_u^2$。
3.1.3 测量模型
贝叶斯滤波的测量模型并不是使用后验概率 p ( x ∣ z ) p(x \, \vert \, z) p(x∣z),而是用似然(likelihood)来进行计算。
假设该仿真模型中的机器人可以获得对当前位置的一个测量量 z t z_t zt,因此可以得到测量模型为:
KaTeX parse error: No such environment: align at position 7: \begin{̲a̲l̲i̲g̲n̲}̲ z_t &= p_t + \…
其中 δ t \delta_t δt是测量的噪声,该噪声遵从一个均值为0的高斯分布 δ t ∼ N ( μ , σ z 2 ) \delta_t \sim N( \mu , \sigma_z^2) δt∼N(μ,σz2)。
3.2 仿真实验设计
3.2.1 采样函数
在真实的机器人系统中,当我们给定一个控制 u t u_t ut,控制系统将会带有噪声的执行这个控制,在真实物理环境下我们的目的就是去恢复带噪声的执行结果。
在仿真的过程中,我们通过一些采样函数根据控制 u t u_t ut来随机的采样,并将采样的结果作为真实的运动结果,然后就可以观察是否可以通过卡尔曼滤波来消除控制 u t u_t ut所产生的累计噪声。
通常在采样的时候,我们使用正态分布(Normal Distribution)或者三角分布(Triangle Distribution)。
a) 正态分布/高斯分布
正态分布的密度函数为:
p ( x ) = 1 2 π σ 2 e − 1 2 ( x − μ ) 2 σ 2 p(x) = \frac {1} {\sqrt{2 \pi \sigma_2}} e^{- \frac 12 \frac {(x - \mu)^2} {\sigma^2}} p(x)=2πσ21e−21σ2(x−μ)2
由于在概率机器人模型中,通常假设分布的均值为 0 0 0,因此均值为 0 0 0的正态分布的密度函数为:
p ( x ) = 1 2 π σ 2 e − 1 2 x 2 σ 2 p(x) = \frac {1} {\sqrt{2 \pi \sigma_2}} e^{- \frac 12 \frac {x^2} {\sigma^2}} p(x)=2πσ21e−21σ2x2
3.2.2 运动采样
回忆之前的运动控制方程:

由图片所示
为了仿真出机器人真实的路径,采用采样的方式来计算真实的机器人状态。在后面根据这个状态来获得观测。
# 控制采样函数,为简化模型我们选用delta t为1
sigma_u = 0.2
def sample_pose(x0, u, sigma):
A = np.array([1, 1, 0, 1]).reshape((2, 2))
B = np.array([0.5, 1]).reshape((2, 1))
noise = np.random.normal(0, sigma)
x0 = np.array(x0).reshape((2, 1))
x1 = np.dot(A, x0) + B * u + B * noise
return x1
sample_pose([0, 0], 1, sigma_u)
3.2.3 测量采样
在这个仿真实验中,机器人只有一个传感器,可以直接获得对机器人位置的测量,因此有下面的测量模型:

# 测量采样函数
sigma_z = 0.1
def sample_measurement(x, sigma):
C = np.array([1, 0]).reshape((1, 2))
x = np.array(x).reshape((2, 1))
noise = np.random.normal(0, sigma, size=(1, 1))
z = np.dot(C, x) + noise
return z
sample_measurement([1, 2], sigma_z)
3.2.4 生成控制序列
在仿真中假设我们共进行10次Kalman Filter迭代,每一次运动的控制 u t u_t ut(也就是加速度 a t a_t at)的值,通过均匀采样得到。
N = 10
U = np.random.uniform(0, 1, size=N)
U
3.2.5 根据控制序列生成无滤波的状态估计
无滤波的状态估计本质上是在假设控制是没有误差的,因此会和真实情况产生巨大的偏移。
假设初始状态 x 0 = ( 0 , 0 ) T x_0 = (0, 0)^T x0=(0,0)T。
# 根据上一时刻的状态和当前控制,来估计当前时刻的状态
def caculate_pose(x0, u):
A = np.array([1, 1, 0, 1]).reshape((2, 2))
B = np.array([0.5, 1]).reshape((2, 1))
x0 = np.array(x0).reshape((2, 1))
x1 = np.dot(A, x0) + B * u
return x1
x0 = np.array([0, 0]).reshape((1, 2))
X_no_filter = x0
for u in U:
x = caculate_pose(X_no_filter[-1], u)
X_no_filter = np.vstack([X_no_filter, np.array(x).reshape((1, 2))])
fig, ax = plt.subplots()
plt.plot(X_no_filter[:, 0], X_no_filter[:,1], label='no-filter')
ax.set_xlabel('Position')
ax.set_ylabel('Velocity')
ax.legend(loc='lower right')

3.2.6 通过采样获得Ground Truth状态
通过对状态进行采样,来仿真真实情况下,带有噪声的控制所产生的运动结果。
x0 = np.array([0, 0]).reshape((1, 2))
X_ground_truth = x0
for u in U:
x = sample_pose(X_ground_truth[-1], u, sigma=0.2)
X_ground_truth = np.vstack([X_ground_truth, np.array(x).reshape((1, 2))])
fig, ax = plt.subplots()
ax.plot(X_no_filter[:, 0], X_no_filter[:,1], c='b', marker='o', label='no-filter')
ax.plot(X_ground_truth[:,0], X_ground_truth[:,1], c='k', marker='o', label='ground-truth')
ax.set_xlabel('Position')
ax.set_ylabel('Velocity')
ax.legend(loc='lower right')
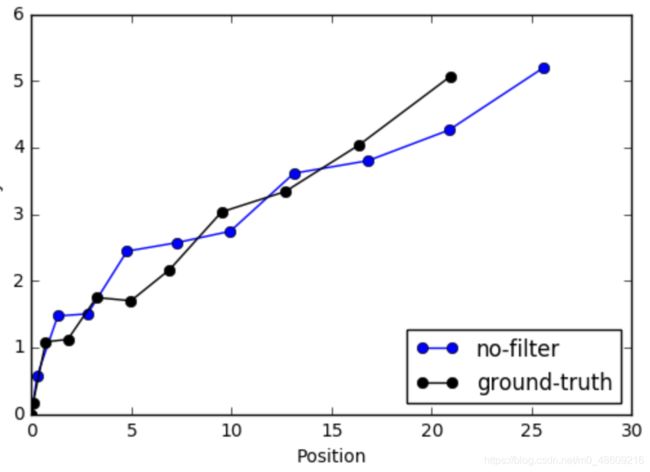
从上图可以看出,当控制 u t u_t ut带有噪声的运行时,无滤波的位姿推断与Ground-Truth之间存在着较大的差异,而且随着时间的变化,其差异会越来越大。
可以通过修改的N,来改变状态的数量,以观察这种随机漂移的现象。
3.2.7 根据Ground-Truth状态来生成测量的采样数据
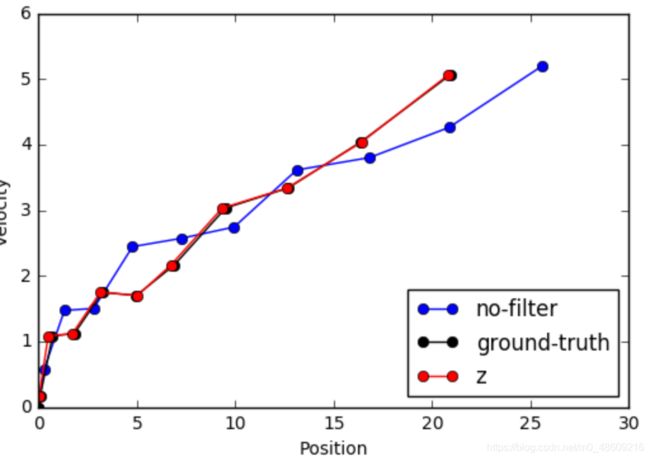
由于传感器观测的是外部物理世界,因此在仿真中,我们根据Ground-Truth的状态来生成带有误差的测量。
但是观测 z t z_t zt并不包含速度的信息,因此在下面的图中,使用Ground-Truth的速度信息来作为观测曲线。因此注意观察红色曲线在水平方向上与Ground-Truth的偏移。
Z = []
for x in X_ground_truth[1:]:
Z.append(sample_measurement(x, sigma=0.1))
fig, ax = plt.subplots()
ax.plot(X_no_filter[:, 0], X_no_filter[:,1], c='b', marker='o', label='no-filter')
ax.plot(X_ground_truth[:,0], X_ground_truth[:,1], c='k', marker='o', label='ground-truth')
ax.plot(np.squeeze(Z), X_ground_truth[1:,1], c='r', marker='o', label='z')
ax.set_xlabel('Position')
ax.set_ylabel('Velocity')
ax.legend(loc='lower right')
3.2.8 利用Kalman Filter进行滤波
回忆之前给出的Kalman Filter算法:
1:Algorithm Kalman_filter ( μ , Σ t − 1 , u t , z t ) ( \mu, \Sigma_{t-1}, u_t, z_t ) (μ,Σt−1,ut,zt):
2: μ ‾ t = A t μ t − 1 + B t u t \overline \mu_t = A_t \mu_{t-1} + B_t u_t μt=Atμt−1+Btut
3: Σ ‾ t = A t Σ t − 1 A t T + R t \overline \Sigma_t = A_t \Sigma_{t-1}A_t^T + R_t Σt=AtΣt−1AtT+Rt
4: K t = Σ ‾ t C t T ( C t Σ ‾ t C t T + Q t ) − 1 K_t = \overline \Sigma_t C_t^T ( C_t \overline \Sigma_t C_t^T + Q_t)^{-1} Kt=ΣtCtT(CtΣtCtT+Qt)−1
5: μ t = μ ‾ t + K t ( z t − C t μ ‾ t ) \mu_t = \overline \mu_t + K_t (z_t - C_t \overline \mu_t) μt=μt+Kt(zt−Ctμt)
6: Σ t = ( I − K t C t ) Σ ‾ t \Sigma_t = (I - K_t C_t) \overline \Sigma_t Σt=(I−KtCt)Σt
7: return μ t , Σ t {\mu_t, \Sigma_t} μt,Σt
def kalman_filter(mu0, Sigma0, u, z, sigma_u=0.2, sigma_z=0.1):
# 控制预测方程和测量更新方程所需要的系数矩阵
A = np.array([1, 1, 0, 1]).reshape((2, 2))
B = np.array([0.5, 1]).reshape((2, 1))
C = np.array([1, 0]).reshape((1, 2))
# 控制方程和测量方程的误差协方差矩阵
R = np.array([0.25, 0, 0 , 1]).reshape((2, 2)) * sigma_u ** 2
Q = np.array([1]).reshape((1,1)) * sigma_z ** 2
#Q是干嘛的 - -
#R是 协方差矩阵 测量方程的
# 对输入的参数进行Tensor维度上的调整,已进行后面的矩阵计算
mu0 = np.array(mu0).reshape((2, 1))
Sigma0 = np.array(Sigma0).reshape((2,2))
z = np.array(z).reshape((1,1))
# 执行控制预测步骤,实现了上面算法的2-3行
mu1 = np.dot(A, mu0) + B * u
Sigma1 = np.dot(np.dot(A, Sigma0), A.T) + R
# 进行测量更新步骤,实现了上面算法的4-6行
Temp = np.linalg.inv(np.dot(np.dot(C, Sigma1), C.T) + Q)
K = np.dot(np.dot(Sigma1, C.T), Temp)
mu2 = mu1 + np.dot(K, (z - np.dot(C, mu1)))
Sigma2 = np.dot((np.eye(2) - np.dot(K, C)), Sigma1)
# 返回Kalman Filter计算出来的新的时刻的均值和方差
return mu2, Sigma2
对于矩阵 R 与 Q
R: 两噪声认为独立,所以是只有对角线上元素非0

R 与 Q 分为控制步与预测步
x0 = np.array([0, 0]).reshape((1, 2))
X_kalman_filter = x0
sigma0 = np.array([1, 0, 0, 1]).reshape((2,2))
Sigma_kalman_filter = []
Sigma_kalman_filter.append(sigma0)
for u, z in zip(U, Z):
x, sigma = kalman_filter(X_kalman_filter[-1], Sigma_kalman_filter[-1],
u, z, sigma_u=0.4, sigma_z=0.1)
X_kalman_filter = np.vstack([X_kalman_filter, x.T])
Sigma_kalman_filter.append(sigma)
fig, ax = plt.subplots()
ax.plot(X_no_filter[:,0], X_no_filter[:,1], c='b', marker='o', label='no-filter')
ax.plot(X_ground_truth[:,0], X_ground_truth[:,1], c='k', marker='o', label='ground-truth')
ax.plot(X_kalman_filter[:,0], X_kalman_filter[:,1], c='r', marker='o', label='kalman-filter')
ax.set_xlabel('Position')
ax.set_ylabel('Velocity')
ax.legend(loc='lower right')
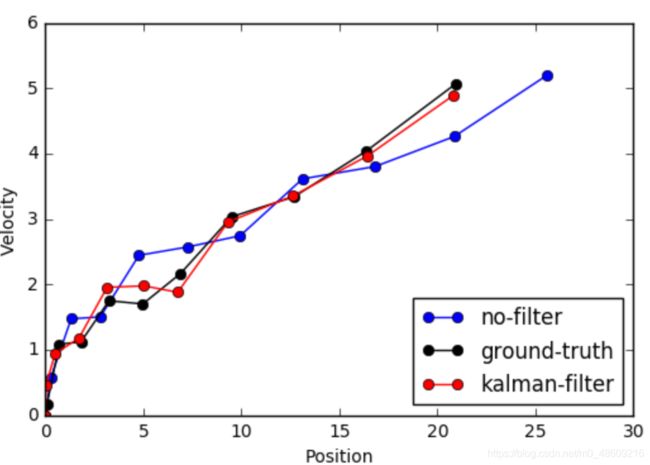
根据上面结果,可以观察到采用kalman滤波后,能够有效的降低误差。
from matplotlib.patches import Ellipse
# 定义函数getEllipse,根据均值和协方差来返回一个Ellipse对象
def getEllipse(mu, sigma):
mu = np.squeeze(mu)
scale = np.sqrt(5.991) * 2
e, v = np.linalg.eig(sigma)
if (e[0] < 0 or e[1] < 0):
raise ValueError
width = np.sqrt(e[0]) * scale
length = np.sqrt(e[1]) * scale
alpha = np.degrees(np.arctan(v[1][0]/v[0][0]))
ell = Ellipse(xy=mu, width=width, height=length, angle=alpha,
alpha=0.2, facecolor='none', edgecolor='r', linestyle = '-', linewidth=1)
return ell
ells = [getEllipse(mu, sigma) for mu, sigma in zip(X_kalman_filter, Sigma_kalman_filter)]
fig, ax = plt.subplots()
ax.plot(X_no_filter[:,0], X_no_filter[:,1],
c='b', marker='o', label='no-filter')
ax.plot(X_ground_truth[:,0], X_ground_truth[:,1],
c='k', marker='o', label='ground-truth')
ax.plot(X_kalman_filter[:,0], X_kalman_filter[:,1],
c='r', marker='o', label='kalman-filter')
ax.set_xlabel('Position')
ax.set_ylabel('Velocity')
ax.legend(loc='lower right')
for ell in ells:
ax.add_artist(ell)
# ax.set_xlim([-10, 25])
# ax.set_ylim([-5, 10])
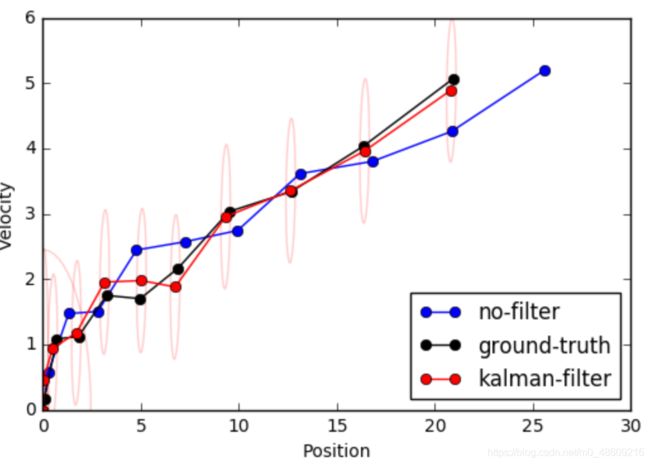
从上图的协方差椭圆可以看到,由于观测无关Velocity,因此垂直方向的不确定较大,而Position方向的不确定性较小。随着滤波过程的进行,不确定性逐渐的收敛。