2021李宏毅机器学习课程-YouTube第十一部分、终身学习Life long learning
第十一部分、终身学习Life long learning
-
-
- 1.灾难性遗忘(Catastrophic Forgetting)
-
- 1)是不为也,非不能也。
- 2)Evaluation评估
- 2.Life-Long learning的可能解法
-
- 1)Catastrophic Forgetting的原因
- 2)解法一、部分神经元具有可塑性(Selective Synaptic Plasticity)
- 3)解法二、改变在每一个网络架构中的资源(Additional Neural Resource Allocation)
- 4)解法三、节省内存(Memory Reply)
- 5)执行顺序(Curriculum Learning)
-
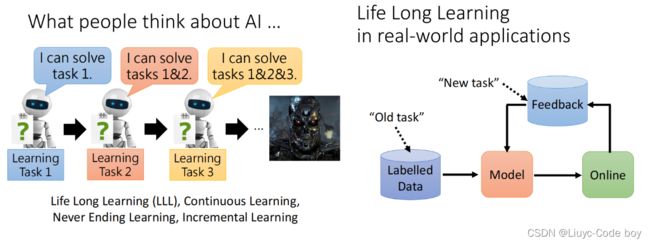
终身学习不只是我们人的目标,当我们把终身学习的概念放在机器学习中的时候就是AI的一个过程。
1.灾难性遗忘(Catastrophic Forgetting)
1)是不为也,非不能也。
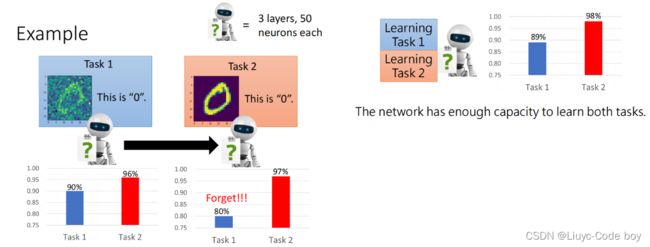
我们发现对于一个Domain的数字识别问题,当我们在左图任务1中训练之后,我们在任务一和任务二的数据上都有比较好的结果,但是,当我们拿任务一得出的模型去训练任务二的数据之后,发现任务二的正确率提升了,但是机器遗忘了任务一的训练。
那么是不是机器不能同时对两个问题进行训练呢,我们如右图将两个任务的数据集一起进行训练,发现正确率都相当不错。所以机器不是说不能同时识别两个问题。
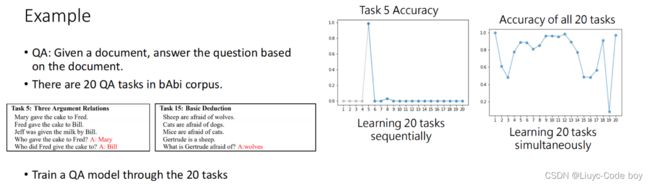
另一个例子是关于QA的例子,我们有20个不同的问答数据,例如左图所示。
右边的两个图分别是我们按照顺序一次训练问题1-20,问题5的正确率的情况,和将二十个问题一次性全部训练之后,每一个问题所对应的正确率。
我们发现顺序学习的方式,在学习问题6之后,问题5就被遗忘了。
但是一次性学习了20个问题之后,除了比较难的一些问题,但是每个问题其实都有较好的解决正确率。
上面的遗忘的问题就是Catastrophic Forgetting。
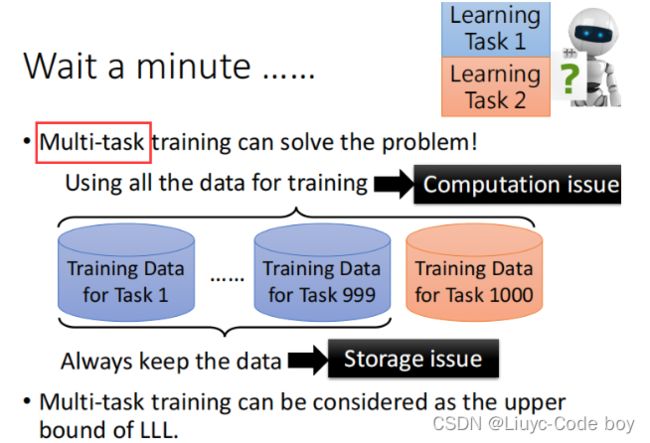
一种解决方式是之前的把所有数据放在一起训练,即Multi-task多任务,我们也可以在训练了前999个数据之后,要训练第1000个数据的时候,把前999个数据倒入第1000个数据中。
这种方式相当于我们一直背着旧的数据,所以负担会很大。
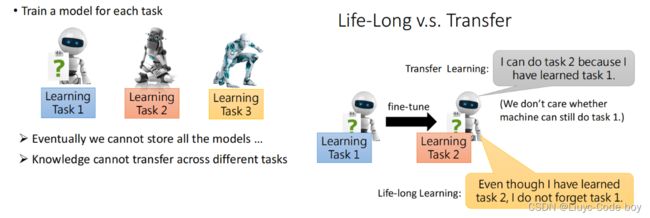
如果每个问题分开学一个模型,那么当问题数量非常多的时候就不能实现了。而且不能实现各个问题见的互通有无。
Life-Long learning关注的是学完第二个问题之后还能不能解决第一个问题,即旧的任务怎么样。
Transfer learning关注的是第一个问题的学习在第二个问题上的效果怎么样,即新的任务怎么样。
2)Evaluation评估
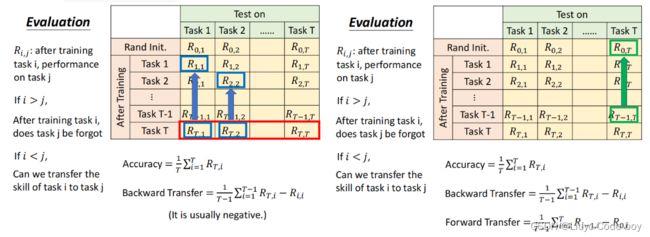
我们常用的评估方法有下面两个。
Ri,j指的是Life-Long learning训练完第i个任务之后训练任务j的准确率,例如,R3,1是训练完第3个任务之后在第一个任务上的正确率。如果 i < j 的话,就相当于是在新的任务上的效果,也就是上面的Transfer learning。
左图所示是Backward Transfer的计算方式,使用每一个最后训练完第T个任务之后的结果和第i个任务的训练准确率做差求和,由于遗忘的存在,所以往往这个结果最后是个负数,我们只需要让这个负数尽可能别太负即可。
右图所示是Forward Transfer的计算方式,通常是想要还没有看到任务T的时候,任务1到任务T-1学习任务T到底会得到怎样的结果。
2.Life-Long learning的可能解法
1)Catastrophic Forgetting的原因
如下图所示是两个误差平面(error surface),比如我们起始参数为θ0的时候,我们训练任务1,使得参数更新为θb,我们用θb去训练任务2,参数最终更新为θ*,相当于是逐步训练了任务1和任务2。当我们用θ星去测试任务1就发现出现了遗忘问题。
注意:下图中白色表示误差大,蓝色表示误差小。
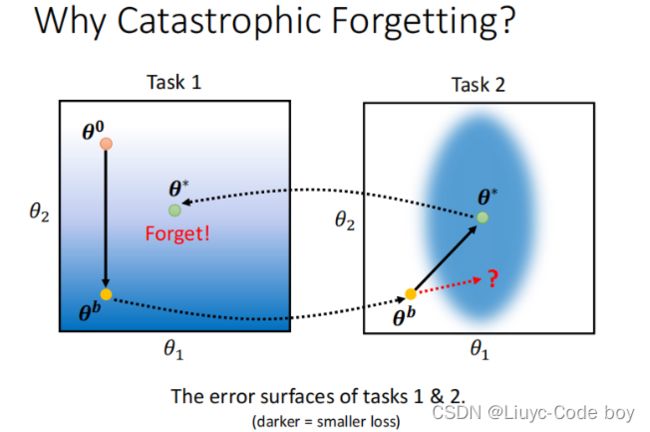
那么,我们要是在训练任务2的时候让θb沿着红色箭头方向去更新参数,那么再次应用在任务1的时候遗忘就会小一点。
2)解法一、部分神经元具有可塑性(Selective Synaptic Plasticity)
我们在逐渐的学习过程中,有的参数可能比较重要,有的参数可能不是很重要。
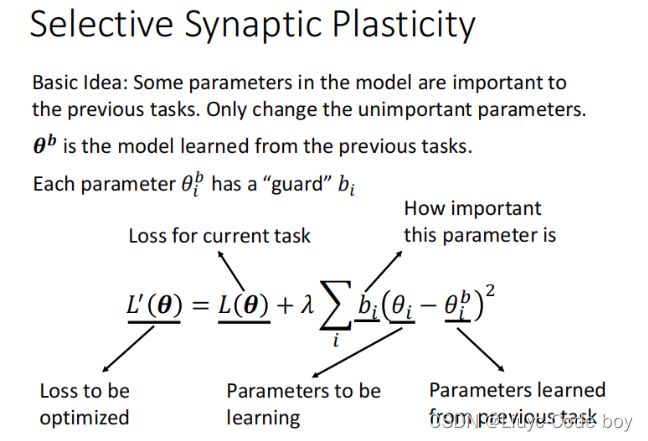
我们对每一个参数θ都有一个各自的保镖b,用来表示这个问题在旧的问题上是否重要。我们新的Loss损失函数如下图所示。
θi 是我们期望的参数,θbi 指的之前的所有问题训练之后的参数。两个做差得出两个参数的差距,再通过bi表示该参数的重要性,越重要bi越大,做乘法之后两个参数越的差距越重要。越不重要bi越小,就是参数的差距是多少不重要。
如果bi全部设成0,那么就是所有参数都同等重要,就是一般的情况,会出现遗忘问题,即Catastrophic Forgetting。
如果bi全都非常大,那么我们可以在旧的任务上得到比较好的结果,但是可能无法对新的任务训练好,即Intransigence。

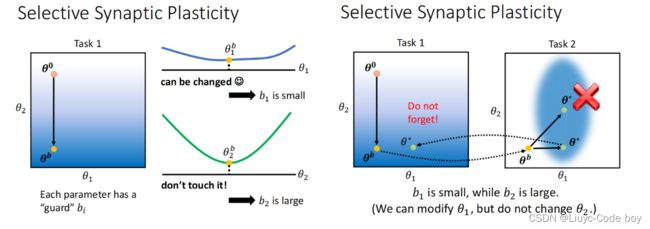
判断一个参数是否重要,即确定bi。
简单来说就是训练一次之后我们对于θb中的每个参数在各个参数方向移动对Loss的影响。例如θb1在θ1 方向上水平移动,我们发现对Loss的影响是小的,所以b1就可以小一点。同理我们发现在θ2的竖直方向上移动,对Loss的影响是大的,所以b2应该设的大一点。
按照上面小的b1,大的b2,我们的训练结果可能就如右图所示,就没有出现遗忘的问题。
3)解法二、改变在每一个网络架构中的资源(Additional Neural Resource Allocation)
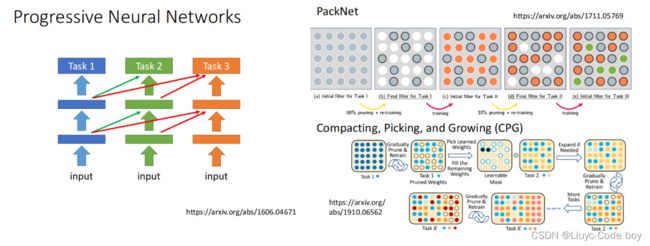
Progressive Neural Networks的想法是,比如我们训练了任务1之后,在训练任务2的时候我们不动任务1结果的参数,添加一些新的参数,训练任务3再添加一些新的参数,最终也可以避免遗忘问题。
但是会造成的问题就是每次多训练一点,模型就会需要更多的空间,最终可能存不下。
PackNet的想法是,我们参数的总量是不会变的,但是训练任务2的时候不会使用任务1用过的参数,训练任务3不会用到任务1和任务2用过的参数,这种方法也可以不会导致遗忘问题,但是其实也就是提前把参数用完了而已。
如果结合Progressive Neural Networks和PackNet,我们得到一种叫CPG的结构,我们的模型既可以增加参数每次也可以保存一部分参数。
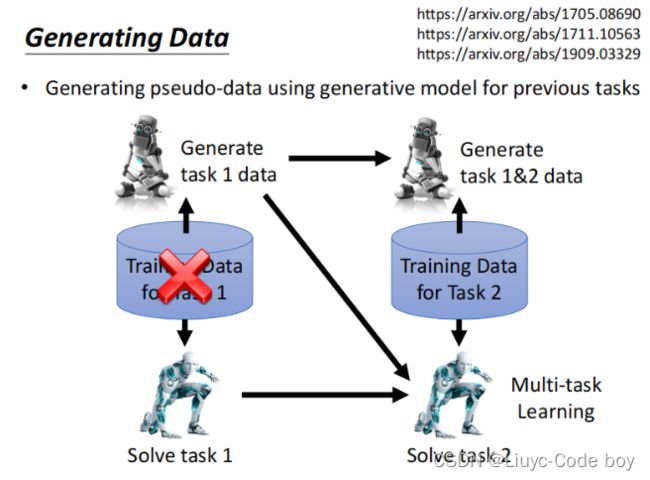
4)解法三、节省内存(Memory Reply)
Generating Data的想法是,我们既然不想背着之前的数据走,但是有时还需要之前的数据,所以我们可以在训练完任务1之后,执行一个Generate产生一些任务一的数据(这个比直接带着任务1的数据走小很多),然后训练任务2的时候,不止是使用任务2的数据,还要使用任务1Generate后的数据。
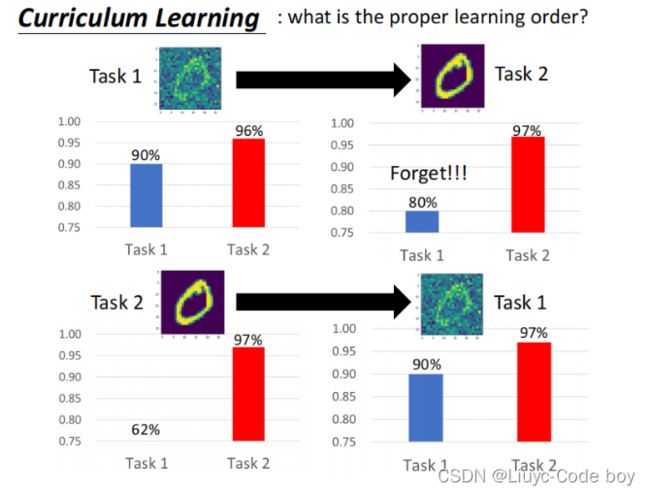
5)执行顺序(Curriculum Learning)
当我们对任务的执行顺序发生变化的时候,也许遗忘问题回产生不一样的结果,所以研究任务执行的顺序也是个很有效解决遗忘问题的研究。
如下图所示,如果先训练任务2,再训练任务1,神奇的事情发生了,遗忘问题就消失了。