ECCV 2020 论文大盘点-自动驾驶篇

自动驾驶(可能)是人工智能产业化进程中最令人兴奋、吸引最多投资、引起大众最多关注的领域,在其技术栈中来自计算机视觉的环境感知模块是各大厂商研究的重点。
本文盘点 ECCV 2020 中与自动驾驶(Autonomous Driving)相关论文,总计 9 篇,5 篇论文开源或将开源,其中多篇文章含有惊艳的视频演示。
下载包含这些论文的 ECCV 2020 所有论文:
ECCV 2020 论文合集下载,分类盘点进行中
实时单目3D目标检测
RTM3D: Real-time Monocular 3D Detection from Object Keypoints for Autonomous Driving
作者 | Peixuan Li, Huaici Zhao, Pengfei Liu, Feidao Cao
单位 | 中科院;国科大
论文 | https://arxiv.org/abs/2001.03343
代码 | https://github.com/Banconxuan/RTM3D(未开源)
代码 | https://github.com/maudzung/RTM3D(非官方)
备注 | ECCV 2020


使用新型光幕传感器感知环境
Active Perception using Light Curtains for Autonomous Driving
作者 | Siddharth Ancha, Yaadhav Raaj, Peiyun Hu, Srinivasa G. Narasimhan, David Held
单位 | 卡内基梅隆大学
论文 | https://arxiv.org/abs/2008.02191
代码 | https://github.com/siddancha/active-perception-light-curtains
主页 | http://siddancha.github.io/projects/active-perception-light-curtains/
备注 | ECCV 2020 Spotlight

视频修复,自动驾驶
DVI: Depth Guided Video Inpainting for Autonomous Driving
作者 | Miao Liao, Feixiang Lu, Dingfu Zhou, Sibo Zhang, Wei Li, Ruigang Yang
单位 | 百度
论文 | https://arxiv.org/abs/2007.08854
代码 | https://github.com/sibozhang/Depth-Guided-Inpainting
数据集 | http://apolloscape.auto/inpainting.html
备注 | ECCV 2020
为了在自动驾驶中获得清晰的街景和照片逼真的模拟效果,作者提出一种自动视频修复算法,该算法可以在深度/点云的指导下,去除视频中的车辆 agents,合成缺失区域。为解决长时间的遮挡问题,可以通过3D 点云配准融合多个视频,使用多个源视频修复目标视频。
作者在真实的城市道路环境中,利用同步图像和激光雷达数据建立了一个大型修复数据集,其中包括许多挑战场景,例如,长时间遮挡。数据集已公开。
所提出的方法在所有标准上都优于最先进的方法,尤其是RMSE(均方根误差)已经降低了13%左右。
轨迹预测
PiP: Planning-informed Trajectory Prediction for Autonomous Driving
作者 | Haoran Song, Wenchao Ding, Yuxuan Chen, Shaojie Shen, Michael Yu Wang, Qifeng Chen
单位 | 香港科技大学;中国科学技术大学
论文 | https://arxiv.org/abs/2003.11476
代码 | https://github.com/Haoran-SONG/PiP-Planning-informed-Prediction(coming)
备注 | ECCV 2020
提出 planning-informed trajectory prediction (PiP) 解决 multi-agent 环境下的预测问题。通过将 ego vehicle(自主车辆)的规划告知预测过程,所提出方法实现了 multi-agent 预测在高速公路数据集上的 SOTA。
另外,通过将 PiP 训练到 ego vehicle(自主车辆)的多个候选轨迹上,实现了预测和规划耦合的新型 pipeline,有益于交互场景下的自动驾驶。

自动驾驶中的视觉定位
DA4AD: End-to-End Deep Attention-based Visual Localization for Autonomous Driving
作者 | Yao Zhou, Guowei Wan, Shenhua Hou, Li Yu, Gang Wang, Xiaofei Rui, Shiyu Song
单位 | 百度ADT
论文 | https://arxiv.org/abs/2003.03026
备注 | ECCV 2020
所提出方法为自动驾驶潜在的低成本定位带来了解决方案。

自动驾驶,运动预测
DSDNet: Deep Structured self-Driving Network
作者 | Wenyuan Zeng, Shenlong Wang, Renjie Liao, Yun Chen, Bin Yang, Raquel Urtasun
单位 | Uber ATG;多伦多大学
论文 | https://arxiv.org/abs/2008.06041
备注 | ECCV 2020

通过同时感知与预测来测试自动驾驶车辆的安全性
Testing the Safety of Self-driving Vehicles by Simulating Perception and Prediction
作者 | Kelvin Wong, Qiang Zhang, Ming Liang, Bin Yang, Renjie Liao, Abbas Sadat, Raquel Urtasun
单位 | Uber ATG;多伦多大学;上海交通大学
论文 | https://arxiv.org/abs/2008.06020
备注 | ECCV 2020

点云3D目标检测
InfoFocus: 3D Object Detection for Autonomous Driving with Dynamic Information Modeling
作者 | Jun Wang, Shiyi Lan, Mingfei Gao, Larry S. Davis
单位 | 马里兰大学;Salesforce Research
论文 | https://arxiv.org/abs/2007.08556

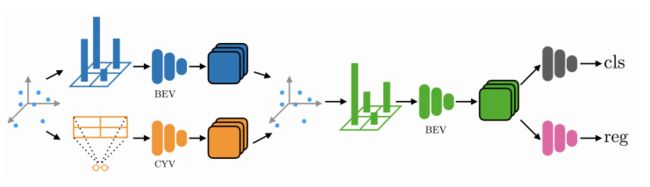
点云3D目标检测
Pillar-based Object Detection for Autonomous Driving
作者 | Yue Wang, Alireza Fathi, Abhijit Kundu, David Ross, Caroline Pantofaru, Thomas Funkhouser, Justin Solomon
单位 | 麻省理工学院;谷歌
论文 | https://arxiv.org/abs/2007.10323
代码 | https://github.com/WangYueFt/pillar-od
备注 | ECCV 2020
编辑:CV君
转载请联系本公众号授权
备注:驾驶

智能驾驶交流群
扫码私信备注方向拉你入群。
我爱计算机视觉
微信号:aicvml
QQ群:805388940
微博知乎:@我爱计算机视觉
网站:www.52cv.net