YOLO1是什么
YOLO是什么?
YOLO是目标检测模型。
目标检测是计算机视觉中比较简单的任务,用来在一张图篇中找到某些特定的物体,目标检测不仅要求我们识别这些物体的种类,同时要求我们标出这些物体的位置。
目标检测综述
计算机视觉能解决哪那些问题--- 分类、检测、分割
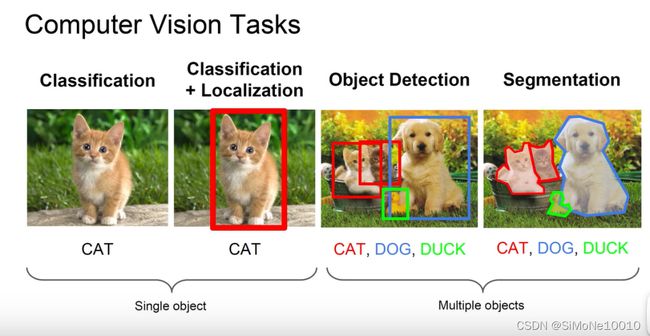
分割--语义分割、实例分割(全景分割)
显然,类别是离散数据,位置是连续数据。
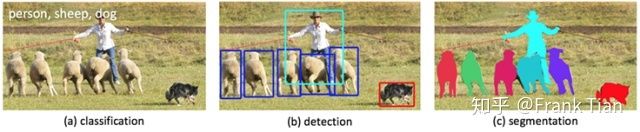
上面的图片中,分别是计算机视觉的三类任务:分类,目标检测,实例分割。
整体上这三类任务从易到难,目标检测的难度位于中间。前面的分类任务是我们做目标检测的基础,至于像素级别的实例分割,难度太大。
YOLO在2016年被提出,发表在计算机视觉顶会CVPR(Computer Vision and Pattern Recognition)上,论文的国内镜像在这里:
You Only Look Once: Unified, Real-Time Object Detectionxxx.itp.ac.cn/pdf/1506.02640v5
YOLO的全称是you only look once,指只需要浏览一次就可以识别出图中的物体的类别和位置。因为只需要看一次,YOLO被称为Region-free方法,相比于Region-based方法,YOLO不需要提前找到可能存在目标的Region。(区域)
也就是说,一个典型的Region-base方法的流程是这样的:先通过计算机图形学(或者深度学习)的方法,对图片进行分析,找出若干个可能存在物体的区域,将这些区域裁剪下来,放入一个图片分类器中,由分类器分类。
因为YOLO这样的Region-free方法只需要一次扫描,也被称为单阶段(1-stage)模型。Region-based方法方法也被称为两阶段(2-stage)方法。
如果我们现在有一个分类器:

现在我们的追求升级了,我们不仅仅想处理这种一张图片中只有一个物体的图片,我们现在想处理有多个物体的图片。
我们该什么做呢?
首先有几点我们要实现想到:首先物体的位置是不确定的,你没办法保证物体一定在最中间;其次,物体的大小是不确定的,有的物体比较大,也有的物体比较小,注意,这里不是说大象一定更大,猫咪一定更小,毕竟还有近大远小嘛;然后,我们还没办法保证物体的种类,假设我们有一个可以识别100中物体的分类器,那么起码图片中出现了这100种物体我们都要识别出来。
比如说这样:
挺难的,是吧?
最naive(朴素)的方法是滑窗法,就是用滑动窗口去识别一个个物体。
比如这样:

上图的红色框框就是所谓的滑窗。如果一个物体正好出现在一个滑窗中,那么我们就可以把它检测出来了,这个滑窗的位置也就是我们认为这个物体所在的位置。
等下,如果物体没有正好出现在一个滑窗中呢?
我们管滑窗每次滑动的距离叫做步长,如果我们把步长设置的特别小,如果步长仅仅为一个像素点,那一定可以保证物体可以正好出现在某个窗口中了。
那如果某个物体特别大,或者特别小呢?
例如在上图中,每个窗口和汽车差不多大小,但是如果我们要识别一辆卡车,一个窗口可能就不够大了。
显然,我们可以设计不同大小的窗口,我们可以设计几十中不同大小的窗口,让他们按照最小的步长滑动,把窗口里的所有图片都放入分类器中。
但是这样太太太浪费时间了。
到这里R-CNN说,用滑窗法可能最后得到了几十万个窗口,而我可以提前扫描一下图片,得到2000个左右的Region(其实就是前面的窗口),这样不就节省了很多时间?R-CNN并且提出了一个叫做Selective Search的算法。(选择性搜索)但是R-CNN被YOLO打脸了,YOLO说,我更快。
YOLO原理
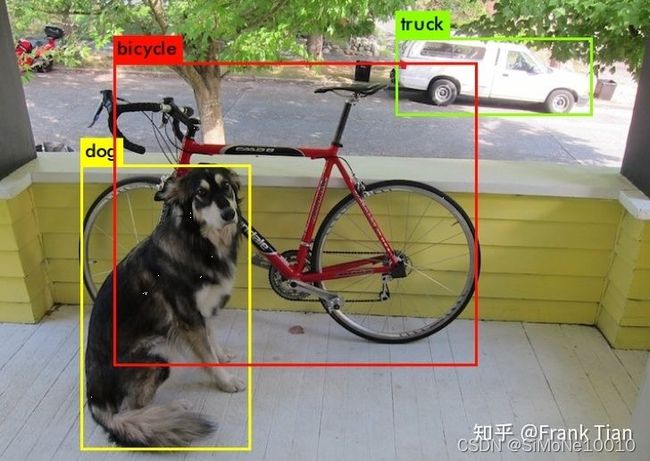
在这之前,我们再重申一下我们的任务。我们的目的是在一张图片中找出物体,并给出它的类别和位置。目标检测是基于监督学习的,每张图片的监督信息是它所包含的N个物体,每个物体的信息有五个,分别是物体的中心位置(x,y)和它的高(h)和宽(w),最后是它的类别。

YOLO 的预测是基于整个图片的,并且它会一次性输出所有检测到的目标信息,包括类别和位置。
先假设我们处理的图片是一个正方形。
YOLO的第一步是分割图片,它将图片分割为 个grid,每个grid的大小都是相等的,像这样:
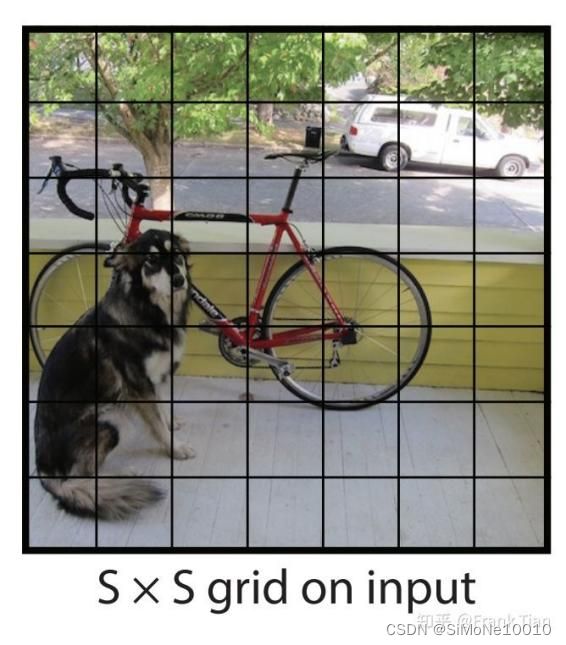
如果我们让每个框只能识别出一个物体,且要求这个物体必须在这个框之内,那YOLO就变成了很蠢的滑窗法了。
YOLO的聪明之处在于,它只要求这个物体的中心落在这个框框之中。
这意味着,我们不用设计非常非常大的框,因为我们只需要让物体的中心在这个框中就可以了,而不是必须要让整个物体都在这个框中。
具体怎么实现呢?
我们要让这个 S*S 个框每个都预测出B个bounding boxs,这个bounding boxs有5个量,分别是物体的中心位置(x,y)和它的高(h)和宽(w),以及这次预测的置信度。
每个框框不仅只预测B个bounding boxs,它还要负责预测这个框框中的物体是什么类别的,这里的类别用one-hot编码表示。
注意,虽然一个框框有多个bounding boxes,但是只能识别出一个物体,因此每个框框需要预测物体的类别,而bounding box不需要预测物体的类别。
也就是说,如果我们有 S*S 个框框,每个框框的bounding boxes个数为B,分类器可以识别出C种不同的物体,那么所有整个ground truth(翻译的意思是地面实况,放到机器学习里面,再抽象点可以把它理解为真值、真实的有效值或者是标准的答案。)的长度为: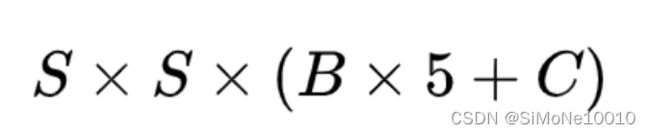
先看这些bounding boxs显示出来是什么样的:
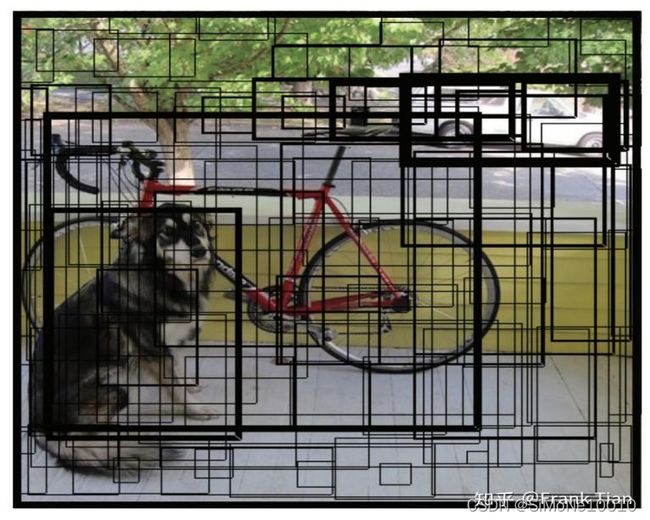
在上面的例子中,图片被分成了49个框,每个框预测2个bounding boxs,因此上面的图中有98个bounding boxs。
可以看到大致上每个框里确实有两个bounding boxs。
可以看到这些BOX中有的边框比较粗,有的比较细,这是置信度不同的表现,置信度高的比较粗,置信度低的比较细。
在详细的介绍confidence之前,我们先来说一说关于bounding boxs的细节。
bounding boxs可以锁定物体的位置,这要求它输出四个关于位置的值,分别是x,y,h和w。我们在处理输入的图片的时候想让图片的大小任意,这一点对于卷积神经网络来说不算太难,但是,如果输出的位置坐标是一个任意的正实数,模型很可能在大小不同的物体上泛化能力有很大的差异。
这时候当然有一个常见的套路,就是对数据进行归一化,让连续数据的值位于0和1之间。
对于x和y而言,这相对比较容易,毕竟x和y是物体的中心位置,既然物体的中心位置在这个grid之中,那么只要让真实的x除以grid(网格)的宽度,让真实的y除以grid的高度就可以了。
但是h和w就不能这么做了,因为一个物体很可能远大于grid的大小,预测物体的高和宽很可能大于bounding boxs的高和宽,这样w除以bounding boxs的宽度,h除以bounding boxs的高度依旧不在0和1之间。
解决方法是让w除以整张图片的宽度,h除以整张图片的高度。
下面的例子是一个448*448的图片,有3*3的grid,展示了计算x,y,w,h的真实值(ground truth)的过程:
接下来,我们好好说道说道这个confidence。
confidence的计算公式是:

这个IOU的全称是intersection over union,也就是交并比,它反应了两个框框的相似度。

 的意思是预测的bounding box和真实的物体位置的交并比。
的意思是预测的bounding box和真实的物体位置的交并比。
 是一个grid有物体的概率,在有物体的时候ground truth为1,没有物体的时候ground truth为0.
是一个grid有物体的概率,在有物体的时候ground truth为1,没有物体的时候ground truth为0.
因为的IOU的groun truth不是确定的,这导致虽然 的ground truth是确定的,但是bounding box的confidence的ground truth是不确定的。
一个不确定的ground truth有什么用呢?
想象这样的问题:老师问小明1+1等于几。小明说等于2,老师又问你有多大的把握你的回答是对的,小明说有80%
这里的80%就是confidence。
confidence主要有两个作用,在后面我会一一介绍。
现在,我们根据上面大雁的图片计算一下样本的groun truth:
首先,这里有9个grid,每个grid有两个bounding box(B),每个bounding box有5个预测值,假设分类器可以识别出3中物体(C),那么ground truth的总长度为
![]()
我们假定大雁的类别的one-hot为100,另外两个是火鸡和特朗普,分别是010和001.
我们规定每个grid的ground truth的顺序是confidence, x, y, w, h, c1, c2, c3
那么第一个(左上角)grid的ground truth应该是:0, ?, ?, ?, ?, ?, ?, ?
实际上除了最中间的grid以外,其他的grid的ground truth都是这样的。
这里的"?"的意思是,随便是多少都行,我不在乎。在下面我们会看到,我们不会对这些值计算损失函数。
中间的ground truth应该是:
iou, 0.48, 0.28, 0.50, 0.32, 1, 0, 0
iou要根据x, y, w, h的预测值现场计算。
这样看似可以让每个grid找到负责的物体,并把它识别出来了。但是还存在一个不得不考虑的问题,如果物体很大,而框框又很小,一个物体被多个框框识别了怎么办?
这里,我们要用到一个叫做非极大值抑制Non-maximal suppression(NMS)的技术。
这个NMS还是基于交并比实现的。
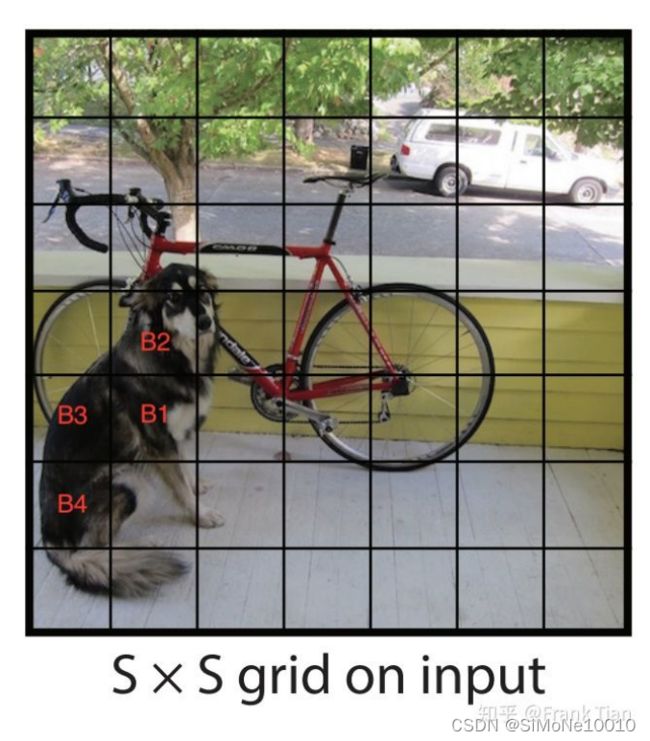
例如在上面狗狗的图里,B1,B2,B3,B4这四个框框可能都说狗狗在我的框里,但是最后的输出应该只有一个框,那怎么把其他框删除呢?
这里就用到了我们之前讲的confidence了,confidence预测有多大的把握这个物体在我的框里,我们在同样是检测狗狗的框里,也就是B1,B2,B3,B4中,选择confidence最大的,把其余的都删掉。
也就是只保留B1.
但是这里还有一个引人深思的问题,为什么confidence的定义是
为什么真正的最中间的grid的confidence往往会比较大呢?
因为我们的bounding boxes是用中点坐标+宽高表示的,每个grid预测的bounding box都要求其中心在这个grid内,那么如果不是最中间的grid,其他的grid的IOU自然而言就会比较低了,因此相应的confidence就降下来了。
现在,我们知道了哪个是应该保留的bounding boxes了,但是还有一个问题,我们是怎么判断出这几个bounding boxes识别的是同一个物体的呢?
这里用到NMS的技巧,我们首先判断这几个grid的类别是不是相同的,假设上面的B1,B2,B3和B4识别的都是狗狗,那么进入下一步,我们保留B1,然后判断B2,B3和B4要不要删除。
我们把B1成为极大bounding box,计算极大bounding box和其他几个bounding box的IOU,如果超过一个阈值,例如0.5,就认为这两个bounding box实际上预测的是同一个物体,就把其中confidence比较小的删除。
最后,我们结合极大bounding box和grid识别的种类,判断图片中有什么物体,它们分别是什么,它们分别在哪。
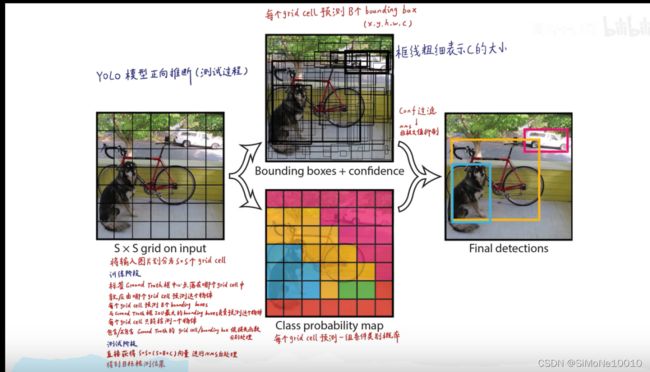
我们刚才说confidence有两个功能,一个是用来极大值抑制,另一个就是在最后输出结果的时候,将某个bounding box的confidencd和这个bounding box所属的grid的类别概率相乘,然后输出。
举个例子,比如某个grid中的某个bounding box预测到了一个物体,将这个bounding box送入神经网络(其实是整张图片一起送进去的,我们这样说是为了方便),然后神经网络对bounding box说,你这里有一个物体的概率是0.8.然后神经网络又对grid说,你这个grid里物体最可能是狗,概率是0.7。
那最后这里是狗的概率就是  。
。
我们在这里就不细讲yolo的网络结构了,相比之下我认为yolo的损失函数的设计更有创见。
yolo的损失函数是这样的:
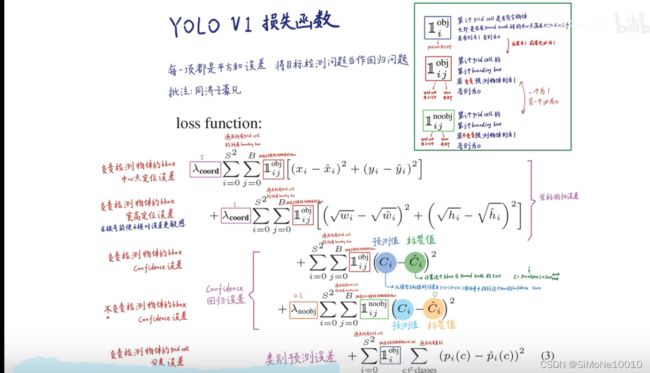
说白了就是,当一个grid有物体的时候,损失函数计算第1,2,3,5项,当grid里没有物体的时候计算第4项。
损失函数一共有5项:
1.中心点定位误差
2.宽高定位误差
3.confidence误差
4.不负责检测Bbox confidence误差
5.负责grid cell 检测误差
首先的是中心坐标的损失函数,用了我们最熟悉的均方误差MSE,这个很好理解。(中心点定位误差)
然后是高和宽,没有简单的用MSE,而是用平方根的MSE,这是为什么呢?(宽高定位误差)
第一个原因是更容易优化,但是还有更重要的原因:
看下面的表格:

首先,我们只考虑var1和var2在0和1之间。当var1和var2都很小的时候,也即是w和h都很小,意味着这个物体很小,那么我们应该尽量放大一些损失函数,让模型在识别小物体的时候准确一点。当var1和var2都很大,意味着这个物体也很大,甚至可能已经布满整张图片了,这时我么可以减小一些损失函数,毕竟很大的物体不需要很高的精度。
一句话,使用平方根的MSE而不是MSE其实就是像让模型对小尺度的物体更敏感。或者说,对大的和小的物体同样敏感。
接下来的三项都使用了MSE,其实用交叉熵可能会更好
其中第4项是用来判断一个bounding box中究竟有没有物体的。
-----------------------------------------------------------------------------------------------------------------------------
写到最后
第一次写对一些规定还不太了解,请大家指正
本文仅为个人学习笔记所用,部分有改动,原文参考来自于
写给小白的YOLO介绍 - 知乎 (zhihu.com) https://zhuanlan.zhihu.com/p/94986199
https://zhuanlan.zhihu.com/p/94986199
部分截图来自于
【精读AI论文】YOLO V1目标检测,看我就够了_哔哩哔哩_bilibilihttps://www.bilibili.com/video/BV15w411Z7LG?spm_id_from=333.999.0.0感谢!