利用pybind11进行C++与Python混合编程
1、pybind的安装
1.1、安装依赖
sudo apt-get install python-dev (or python3-dev)
sudo apt-get install cmake
sudo pip install pytest
sudo pip install numpy
sudo pip install scipy
1.2、pip安装
sudo pip install pybind11
1.3、源码安装
- 1、创建目录
- 2、获取pybind11源码包 https://github.com/pybind/pybind11
- 3、下载Eigen http://eigen.tuxfamily.org/index.php?title=Main_Page
- 4、在目录执行
mkdir build - 5 、
cd build - 6、
cmake .. - 7、
make check -j 4 - 8、
sudo make install
1.4、使用brew 安装
brew install pybind11
2、使用pybind进行C++代码编写
这里以ROS为列,获取Baxter机器人上方的图片,为了简洁方便看,这里只放头文件和cmake文件
2.1、头文件
- rosBase.hpp
#ifndef _ROS_H_
#define _ROS_H_
#include- baxterImage.hpp
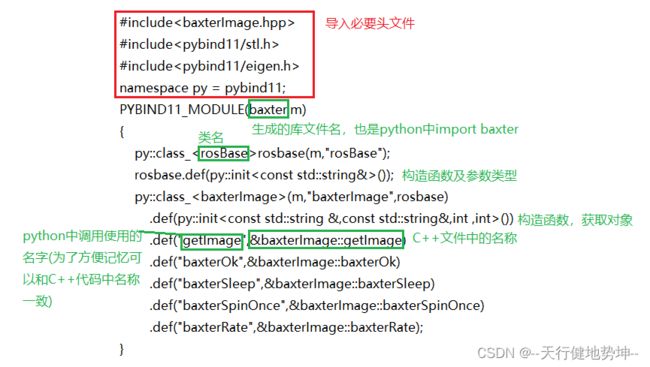
#include2.2、下面是一个重要的文件 bindings.cpp
用于把C++代码和python代码进行绑定
#include可以对着下面图像进行理解
2.3、Cmake文件
cmake_minimum_required(VERSION 2.8.3)
project(Ros_control)
## Compile as C++11, supported in ROS Kinetic and newer
add_compile_options(-std=c++11)
find_package( OpenCV REQUIRED)
find_package(Eigen3 REQUIRED)
include_directories(
include
"/opt/ros/kinetic/include/"
"/usr/include/"
"/usr/include/boost/"
"/usr/lib/python3.7/dist-packages/numpy/core/include/"
"/usr/include/python3.7m/"
"/headless/baxter_ws/devel/include/"
)
LINK_DIRECTORIES(
"/opt/ros/kinetic/lib/"
"/usr/lib/x86_64-linux-gnu/"
"/opt/ros/kinetic/lib/x86_64-linux-gnu/"
"/lib64/"
)
include_directories(SYSTEM ${EIGEN3_INCLUDE_DIRS})
add_subdirectory(
lib/pybind11
)
pybind11_add_module(baxter "src/rosBase.cpp" "src/baxterImage.cpp" "src/bindings.cpp")
target_link_libraries(
baxter PRIVATE ${OpenCV_LIBS}
)
可以把pybind11 的lib库拷入到编译目录的lib库中(不是必须,能找到对应的库就行)
编译时会根据python版本生成baxter.cpython-37m-x86_64-linux-gnu.so文件
3、使用
把生成的so文件放到python文件使用的地方,或者让使用的文件能够找到此so文件
3.1、使用的案例代码
import baxter
#push = baxter.baxterImage("pushimage","*",6666,1000)
push = baxter.baxterImage("pushimage","192.168.1.105",6666,1000)
push.getImage("h")
while push.baxterOk():
push.baxterSpinOnce()
参考学习