自动驾驶道路曲率计算
自动驾驶系列
车道曲率和中心点偏离距离计算
文章目录
- 自动驾驶系列
- 目标
- 一、曲率的介绍
-
- 圆的曲率
- 曲线的曲率
- 二、实现
-
- 1.计算曲率半径的方法,代码实现如下:
- 总结
目标
知道车道曲率计算的方法
知道计算中心点偏离距离的计算
一、曲率的介绍
曲线的曲率就是针对曲线上某个点的切线方向角对弧长的转动率,通过微分来定义,表明曲线偏离直线的程度。数学上表明曲线在某一点的弯曲程度的数值。曲率越大,表示曲线的弯曲程度越大。曲率的倒数就是曲率半径。
圆的曲率
下面有三个球体,网球、篮球、地球,半径越小的越容易看出是圆的,所以随着半径的增加,圆的程度就越来越弱了。

定义球体或者圆的“圆”的程度,就是 曲率 ,计算方法为:
其中rr为球体或者圆的半径,这样半径越小的圆曲率越大,直线可以看作半径为无穷大的圆,其曲率为:
曲线的曲率
不同的曲线有不同的弯曲程度:
 怎么来表示某一条曲线的弯曲程度呢?
怎么来表示某一条曲线的弯曲程度呢?
我们知道三点确定一个圆:
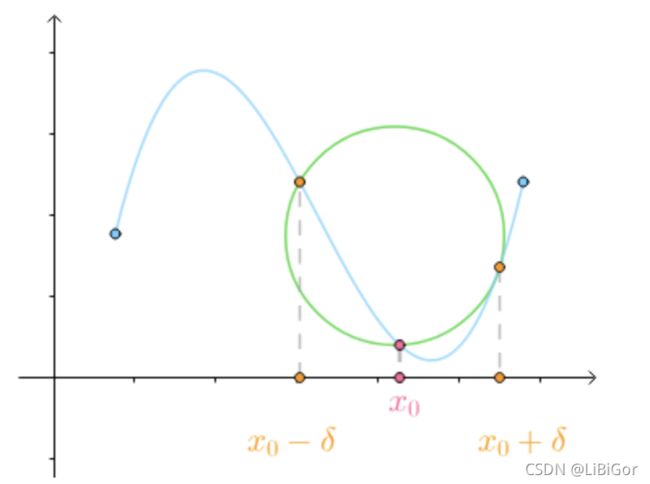
当δ 趋近于0时,我们可以的到曲线在x_0x0处的密切圆,也就是曲线在该点的圆近似:
另,在曲线比较平坦的位置,密切圆较大,在曲线比较弯曲的地方,密切圆较小,
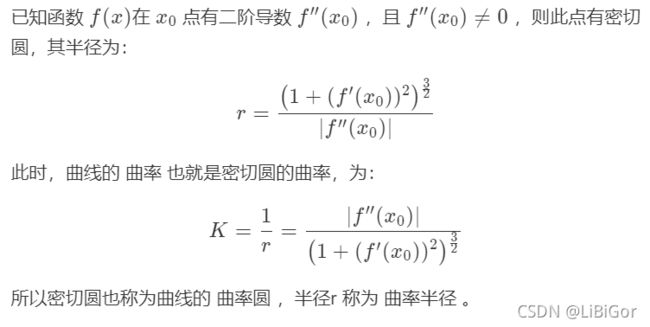
因此,我们通过密切圆的曲率来定义曲线的曲率,定义如下:
二、实现
1.计算曲率半径的方法,代码实现如下:
代码如下(示例):
def cal_radius(img, left_fit, right_fit):
# 图像中像素个数与实际中距离的比率
# 沿车行进的方向长度大概覆盖了30米,按照美国高速公路的标准,宽度为3.7米(经验值)
ym_per_pix = 30 / 720 # y方向像素个数与距离的比例
xm_per_pix = 3.7 / 700 # x方向像素个数与距离的比例
# 计算得到曲线上的每个点
left_y_axis = np.linspace(0, img.shape[0], img.shape[0] - 1)
left_x_axis = left_fit[0] * left_y_axis ** 2 + left_fit[1] * left_y_axis + left_fit[2]
right_y_axis = np.linspace(0, img.shape[0], img.shape[0] - 1)
right_x_axis = right_fit[0] * right_y_axis ** 2 + right_fit[1] * right_y_axis + right_fit[2]
# 获取真实环境中的曲线
left_fit_cr = np.polyfit(left_y_axis * ym_per_pix, left_x_axis * xm_per_pix, 2)
right_fit_cr = np.polyfit(right_y_axis * ym_per_pix, right_x_axis * xm_per_pix, 2)
# 获得真实环境中的曲线曲率
left_curverad = ((1 + (2 * left_fit_cr[0] * left_y_axis * ym_per_pix + left_fit_cr[1]) ** 2) ** 1.5) / np.absolute(
2 * left_fit_cr[0])
right_curverad = ((1 + (
2 * right_fit_cr[0] * right_y_axis * ym_per_pix + right_fit_cr[1]) ** 2) ** 1.5) / np.absolute(
2 * right_fit_cr[0])
# 在图像上显示曲率
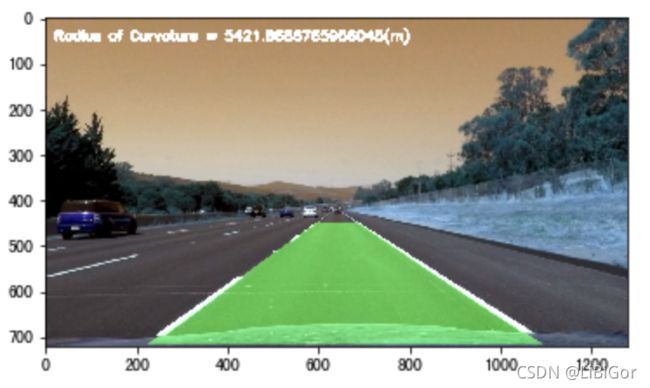
cv2.putText(img, 'Radius of Curvature = {}(m)'.format(np.mean(left_curverad)), (20, 50), cv2.FONT_ITALIC, 1,
(255, 255, 255), 5)
return img
曲率半径显示效果:
 计算偏离中心的距离:
计算偏离中心的距离:
# 1. 定义函数计算图像的中心点位置
def cal_line__center(img):
undistort_img = img_undistort(img, mtx, dist)
rigin_pipline_img = pipeline(undistort_img)
transform_img = img_perspect_transform(rigin_pipline_img, M)
left_fit, right_fit = cal_line_param(transform_img)
y_max = img.shape[0]
left_x = left_fit[0] * y_max ** 2 + left_fit[1] * y_max + left_fit[2]
right_x = right_fit[0] * y_max ** 2 + right_fit[1] * y_max + right_fit[2]
return (left_x + right_x) / 2
# 2. 假设straight_lines2_line.jpg,这张图片是位于车道的中央,实际情况可以根据测量验证.
img =cv2.imread("./test/straight_lines2_line.jpg")
lane_center = cal_line__center(img)
print("车道的中心点为:{}".format(lane_center))
# 3. 计算偏离中心的距离
def cal_center_departure(img, left_fit, right_fit):
# 计算中心点
y_max = img.shape[0]
left_x = left_fit[0] * y_max ** 2 + left_fit[1] * y_max + left_fit[2]
right_x = right_fit[0] * y_max ** 2 + right_fit[1] * y_max + right_fit[2]
xm_per_pix = 3.7 / 700
center_depart = ((left_x + right_x) / 2 - lane_center) * xm_per_pix
# 在图像上显示偏移
if center_depart > 0:
cv2.putText(img, 'Vehicle is {}m right of center'.format(center_depart), (20, 100), cv2.FONT_ITALIC, 1,
(255, 255, 255), 5)
elif center_depart < 0:
cv2.putText(img, 'Vehicle is {}m left of center'.format(-center_depart), (20, 100), cv2.FONT_ITALIC, 1,
(255, 255, 255), 5)
else:
cv2.putText(img, 'Vehicle is in the center', (20, 100), cv2.FONT_ITALIC, 1, (255, 255, 255), 5)
return img
计算偏离中心显示效果如下:

总结
曲率是表示曲线的弯曲程度,在这里是计算车道的弯曲程度
偏离中心的距离:利用已知的在中心的图像计算其他图像的偏离距离
# encoding:utf-8
from matplotlib import font_manager
my_font = font_manager.FontProperties(fname="/System/Library/Fonts/PingFang.ttc")
import cv2
import numpy as np
import matplotlib.pyplot as plt
#遍历文件夹
import glob
from moviepy.editor import VideoFileClip
import sys
reload(sys)
sys.setdefaultencoding('utf-8')
"""参数设置"""
nx = 9
ny = 6
#获取棋盘格数据
file_paths = glob.glob("./camera_cal/calibration*.jpg")
# # 绘制对比图
# def plot_contrast_image(origin_img, converted_img, origin_img_title="origin_img", converted_img_title="converted_img",
# converted_img_gray=False):
# fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(15, 20))
# ax1.set_title = origin_img_title
# ax1.imshow(origin_img)
# ax2.set_title = converted_img_title
# if converted_img_gray == True:
# ax2.imshow(converted_img, cmap="gray")
# else:
# ax2.imshow(converted_img)
# plt.show()
#相机矫正使用opencv封装好的api
#目的:得到内参、外参、畸变系数
def cal_calibrate_params(file_paths):
#存储角点数据的坐标
object_points = [] #角点在真实三维空间的位置
image_points = [] #角点在图像空间中的位置
#生成角点在真实世界中的位置
objp = np.zeros((nx*ny,3),np.float32)
#以棋盘格作为坐标,每相邻的黑白棋的相差1
objp[:,:2] = np.mgrid[0:nx,0:ny].T.reshape(-1,2)
#角点检测
for file_path in file_paths:
img = cv2.imread(file_path)
#将图像灰度化
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#角点检测
rect,coners = cv2.findChessboardCorners(gray,(nx,ny),None)
#若检测到角点,则进行保存 即得到了真实坐标和图像坐标
if rect == True :
object_points.append(objp)
image_points.append(coners)
# 相机较真
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(object_points, image_points, gray.shape[::-1], None, None)
return ret, mtx, dist, rvecs, tvecs
# 图像去畸变:利用相机校正的内参,畸变系数
def img_undistort(img, mtx, dist):
dis = cv2.undistort(img, mtx, dist, None, mtx)
return dis
#车道线提取
#颜色空间转换--》边缘检测--》颜色阈值--》并且使用L通道进行白色的区域进行抑制
def pipeline(img,s_thresh = (170,255),sx_thresh=(40,200)):
# 复制原图像
img = np.copy(img)
# 颜色空间转换
hls = cv2.cvtColor(img,cv2.COLOR_RGB2HLS).astype(np.float)
l_chanel = hls[:,:,1]
s_chanel = hls[:,:,2]
#sobel边缘检测
sobelx = cv2.Sobel(l_chanel,cv2.CV_64F,1,0)
#求绝对值
abs_sobelx = np.absolute(sobelx)
#将其转换为8bit的整数
scaled_sobel = np.uint8(255 * abs_sobelx / np.max(abs_sobelx))
#对边缘提取的结果进行二值化
sxbinary = np.zeros_like(scaled_sobel)
#边缘位置赋值为1,非边缘位置赋值为0
sxbinary[(scaled_sobel >= sx_thresh[0]) & (scaled_sobel <= sx_thresh[1])] = 1
#对S通道进行阈值处理
s_binary = np.zeros_like(s_chanel)
s_binary[(s_chanel >= s_thresh[0]) & (s_chanel <= s_thresh[1])] = 1
# 结合边缘提取结果和颜色通道的结果,
color_binary = np.zeros_like(sxbinary)
color_binary[((sxbinary == 1) | (s_binary == 1)) & (l_chanel > 100)] = 1
return color_binary
#透视变换-->将检测结果转换为俯视图。
#获取透视变换的参数矩阵【二值图的四个点】
def cal_perspective_params(img,points):
# x与y方向上的偏移
offset_x = 330
offset_y = 0
#转换之后img的大小
img_size = (img.shape[1],img.shape[0])
src = np.float32(points)
#设置俯视图中的对应的四个点 左上角 右上角 左下角 右下角
dst = np.float32([[offset_x, offset_y], [img_size[0] - offset_x, offset_y],
[offset_x, img_size[1] - offset_y], [img_size[0] - offset_x, img_size[1] - offset_y]])
## 原图像转换到俯视图
M = cv2.getPerspectiveTransform(src, dst)
# 俯视图到原图像
M_inverse = cv2.getPerspectiveTransform(dst, src)
return M, M_inverse
#根据透视变化矩阵完成透视变换
def img_perspect_transform(img,M):
#获取图像大小
img_size = (img.shape[1],img.shape[0])
#完成图像的透视变化
return cv2.warpPerspective(img,M,img_size)
# 精确定位车道线
#传入已经经过边缘检测的图像阈值结果的二值图,再进行透明变换
def cal_line_param(binary_warped):
#定位车道线的大致位置==计算直方图
histogram = np.sum(binary_warped[:,:],axis=0) #计算y轴
# 将直方图一分为二,分别进行左右车道线的定位
midpoint = np.int(histogram.shape[0]/2)
#分别统计左右车道的最大值
midpoint = np.int(histogram.shape[0] / 2)
leftx_base = np.argmax(histogram[:midpoint]) #左车道
rightx_base = np.argmax(histogram[midpoint:]) + midpoint #右车道
#设置滑动窗口
#对每一个车道线来说 滑动窗口的个数
nwindows = 9
#设置滑动窗口的高
window_height = np.int(binary_warped.shape[0]/nwindows)
#设置滑动窗口的宽度==x的检测范围,即滑动窗口的一半
margin = 100
#统计图像中非0点的个数
nonzero = binary_warped.nonzero()
nonzeroy = np.array(nonzero[0])#非0点的位置-x坐标序列
nonzerox = np.array(nonzero[1])#非0点的位置-y坐标序列
#车道检测位置
leftx_current = leftx_base
rightx_current = rightx_base
#设置阈值:表示当前滑动窗口中的非0点的个数
minpix = 50
#记录窗口中,非0点的索引
left_lane_inds = []
right_lane_inds = []
#遍历滑动窗口
for window in range(nwindows):
# 设置窗口的y的检测范围,因为图像是(行列),shape[0]表示y方向的结果,上面是0
win_y_low = binary_warped.shape[0] - (window + 1) * window_height #y的最低点
win_y_high = binary_warped.shape[0] - window * window_height #y的最高点
# 左车道x的范围
win_xleft_low = leftx_current - margin
win_xleft_high = leftx_current + margin
# 右车道x的范围
win_xright_low = rightx_current - margin
win_xright_high = rightx_current + margin
# 确定非零点的位置x,y是否在搜索窗口中,将在搜索窗口内的x,y的索引存入left_lane_inds和right_lane_inds中
good_left_inds = ((nonzeroy >= win_y_low) & (nonzeroy < win_y_high) &
(nonzerox >= win_xleft_low) & (nonzerox < win_xleft_high)).nonzero()[0]
good_right_inds = ((nonzeroy >= win_y_low) & (nonzeroy < win_y_high) &
(nonzerox >= win_xright_low) & (nonzerox < win_xright_high)).nonzero()[0]
left_lane_inds.append(good_left_inds)
right_lane_inds.append(good_right_inds)
# 如果获取的点的个数大于最小个数,则利用其更新滑动窗口在x轴的位置=修正车道线的位置
if len(good_left_inds) > minpix:
leftx_current = np.int(np.mean(nonzerox[good_left_inds]))
if len(good_right_inds) > minpix:
rightx_current = np.int(np.mean(nonzerox[good_right_inds]))
# 将检测出的左右车道点转换为array
left_lane_inds = np.concatenate(left_lane_inds)
right_lane_inds = np.concatenate(right_lane_inds)
# 获取检测出的左右车道x与y点在图像中的位置
leftx = nonzerox[left_lane_inds]
lefty = nonzeroy[left_lane_inds]
rightx = nonzerox[right_lane_inds]
righty = nonzeroy[right_lane_inds]
# 3.用曲线拟合检测出的点,二次多项式拟合,返回的结果是系数
left_fit = np.polyfit(lefty, leftx, 2)
right_fit = np.polyfit(righty, rightx, 2)
return left_fit, right_fit
#填充车道线之间的多边形
def fill_lane_poly(img,left_fit,right_fit):
#行数
y_max = img.shape[0]
#设置填充之后的图像的大小 取到0-255之间
out_img = np.dstack((img,img,img))*255
#根据拟合结果,获取拟合曲线的车道线像素位置
left_points = [[left_fit[0] * y ** 2 + left_fit[1] * y + left_fit[2], y] for y in range(y_max)]
right_points = [[right_fit[0] * y ** 2 + right_fit[1] * y + right_fit[2], y] for y in range(y_max - 1, -1, -1)]
# 将左右车道的像素点进行合并
line_points = np.vstack((left_points, right_points))
# 根据左右车道线的像素位置绘制多边形
cv2.fillPoly(out_img, np.int_([line_points]), (0, 255, 0))
return out_img
#计算车道线曲率的方法
def cal_readius(img,left_fit,right_fit):
# 比例
ym_per_pix = 30/720
xm_per_pix = 3.7/700
# 得到车道线上的每个点
left_y_axis = np.linspace(0,img.shape[0],img.shape[0]-1) #个数img.shape[0]-1
left_x_axis = left_fit[0]*left_y_axis**2+left_fit[1]*left_y_axis+left_fit[0]
right_y_axis = np.linspace(0,img.shape[0],img.shape[0]-1)
right_x_axis = right_fit[0]*right_y_axis**2+right_fit[1]*right_y_axis+right_fit[2]
# 把曲线中的点映射真实世界,再计算曲率
left_fit_cr = np.polyfit(left_y_axis*ym_per_pix,left_x_axis*xm_per_pix,2)
right_fit_cr = np.polyfit(right_y_axis*ym_per_pix,right_x_axis*xm_per_pix,2)
# 计算曲率
left_curverad = ((1+(2*left_fit_cr[0]*left_y_axis*ym_per_pix+left_fit_cr[1])**2)**1.5)/np.absolute(2*left_fit_cr[0])
right_curverad = ((1+(2*right_fit_cr[0]*right_y_axis*ym_per_pix *right_fit_cr[1])**2)**1.5)/np.absolute((2*right_fit_cr[0]))
# 将曲率半径渲染在图像上 写什么
cv2.putText(img,'Radius of Curvature = {}(m)'.format(np.mean(left_curverad)),(20,50),cv2.FONT_ITALIC,1,(255,255,255),5)
return img
# 计算车道线中心的位置
def cal_line_center(img):
#去畸变
undistort_img = img_undistort(img,mtx,dist)
#提取车道线
rigin_pipeline_img = pipeline(undistort_img)
#透视变换
trasform_img = img_perspect_transform(rigin_pipeline_img,M)
#精确定位
left_fit,right_fit = cal_line_param(trasform_img)
#当前图像的shape[0]
y_max = img.shape[0]
#左车道线
left_x = left_fit[0]*y_max**2+left_fit[1]*y_max+left_fit[2]
#右车道线
right_x = right_fit[0]*y_max**2+right_fit[1]*y_max+right_fit[2]
#返回车道中心点
return (left_x+right_x)/2
def cal_center_departure(img,left_fit,right_fit):
# 计算中心点
y_max = img.shape[0]
left_x = left_fit[0]*y_max**2 + left_fit[1]*y_max +left_fit[2]
right_x = right_fit[0]*y_max**2 +right_fit[1]*y_max +right_fit[2]
xm_per_pix = 3.7/700
center_depart = ((left_x+right_x)/2-lane_center)*xm_per_pix
# 渲染
if center_depart>0:
cv2.putText(img,'Vehicle is {}m right of center'.format(center_depart), (20, 100), cv2.FONT_ITALIC, 1,
(255, 255, 255), 5)
elif center_depart<0:
cv2.putText(img, 'Vehicle is {}m left of center'.format(-center_depart), (20, 100), cv2.FONT_ITALIC, 1,
(255, 255, 255), 5)
else:
cv2.putText(img, 'Vehicle is in the center', (20, 100), cv2.FONT_ITALIC, 1, (255, 255, 255), 5)
return img
#计算车辆偏离中心点的距离
def cal_center_departure(img,left_fit,right_fit):
# 计算中心点
y_max = img.shape[0]
#左车道线
left_x = left_fit[0]*y_max**2 + left_fit[1]*y_max +left_fit[2]
#右车道线
right_x = right_fit[0]*y_max**2 +right_fit[1]*y_max +right_fit[2]
#x方向上每个像素点代表的距离大小
xm_per_pix = 3.7/700
#计算偏移距离 像素距离 × xm_per_pix = 实际距离
center_depart = ((left_x+right_x)/2-lane_center)*xm_per_pix
# 渲染
if center_depart>0:
cv2.putText(img,'Vehicle is {}m right of center'.format(center_depart), (20, 100), cv2.FONT_ITALIC, 1,
(255, 255, 255), 5)
elif center_depart<0:
cv2.putText(img, 'Vehicle is {}m left of center'.format(-center_depart), (20, 100), cv2.FONT_ITALIC, 1,
(255, 255, 255), 5)
else:
cv2.putText(img, 'Vehicle is in the center', (20, 100), cv2.FONT_ITALIC, 1, (255, 255, 255), 5)
return img
if __name__ == "__main__":
ret, mtx, dist, rvecs, tvecs = cal_calibrate_params(file_paths)
#透视变换
#获取原图的四个点
img = cv2.imread('./test/straight_lines2.jpg')
points = [[601, 448], [683, 448], [230, 717], [1097, 717]]
#将四个点绘制到图像上 (文件,坐标起点,坐标终点,颜色,连接起来)
img = cv2.line(img, (601, 448), (683, 448), (0, 0, 255), 3)
img = cv2.line(img, (683, 448), (1097, 717), (0, 0, 255), 3)
img = cv2.line(img, (1097, 717), (230, 717), (0, 0, 255), 3)
img = cv2.line(img, (230, 717), (601, 448), (0, 0, 255), 3)
#透视变换的矩阵
M,M_inverse = cal_perspective_params(img,points)
#计算车道线的中心距离
lane_center = cal_line_center(img)
参考文档