直线检测:霍夫变换 HoughLines 和 HoughLinesP
第一部分:函数介绍
1、标准霍夫线变换
void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=0, double stn=0 )
参数:
image:边缘检测的输出图像. 它应该是个灰度图 (但事实上是个二值化图)
lines:储存着检测到的直线的参数对 的容器
rho:参数极径 以像素值为单位的分辨率. 我们使用 1 像素.
theta:参数极角 以弧度为单位的分辨率. 我们使用 1度 (即CV_PI/180)
theta:要”检测” 一条直线所需最少的的曲线交点
srn and stn: 参数默认为0.
2、统计概率霍夫线变换
void HoughLinesP(InputArray image, OutputArray lines, double rho, double theta, int threshold,double minLineLength=0, double maxLineGap=0 )
参数:
image: 边缘检测的输出图像. 它应该是个灰度图 (但事实上是个二值化图) *
lines: 储存着检测到的直线的参数对 的容器,也就是线段两个端点的坐标
rho : 参数极径 以像素值为单位的分辨率. 我们使用 1 像素.
theta: 参数极角 以弧度为单位的分辨率. 我们使用 1度 (即CV_PI/180)
threshold: 要”检测” 一条直线所需最少的的曲线交点
minLinLength: 能组成一条直线的最少点的数量. 点数量不足的直线将被抛弃.线段的最小长度
maxLineGap:线段上最近两点之间的阈值
备注:
(1)霍夫线变换是一种用来寻找直线的方法.
(2)霍夫线变换之前, 首先要对图像进行边缘检测的处理,即霍夫线变换的直接输入只能是边缘二值图像.
第二部分:原理

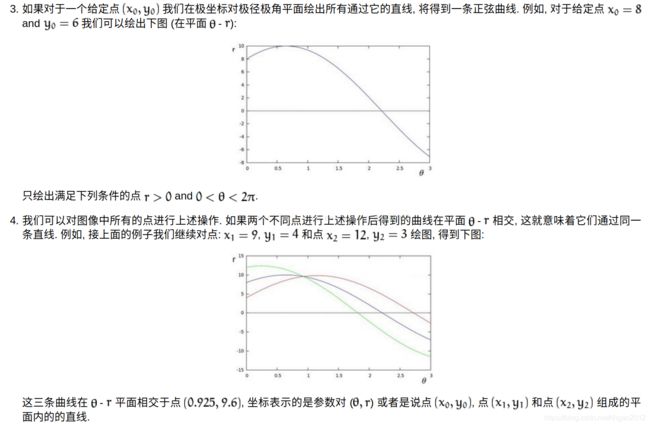

上面的5和6是重点,笛卡尔坐标系中,同一条直线上的点,转到极坐标系下,会相交于一个点。
第三部分:代码实现
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include ,里面存放4个int
line( cdst, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0,0,255), 3, CV_AA);
//要划的线所在的图像:cdst, 起点:Point(l[0], l[1]), 终点:Point(l[2], l[3]), 颜色:Scalar(0,0,255),
}
#endif
imshow("source", src);
imshow("detected lines", cdst);
waitKey();
return 0;//等待用户按键推出程序
}
第四部分:结果
输入输出图像:

