数字图像处理——第五章图像复原与重建
文章目录
- 5.1 绪论
- 5.2 图像退化/复原过程的模型
-
- 5.2.1 常见噪声概率密度函数
- 5.2.2 周期噪声
- 5.3 空间滤波
-
- 5.3.1 空间域滤波实验
- 5.4 频率域消除周期噪声
- 5.5 图像的逆滤波
- 总结
5.1 绪论
当图像中具有加性噪声和周期噪声时,图像就会发生退化,我们可以利用噪声的不同特点,选取空间域和频率域的滤波器对图像进行复原,目的使设立一个最佳准则产生期望结果得最佳估计,使复原后得图像尽可能接近原图像。
5.2 图像退化/复原过程的模型
退化的过程可建模原图像经过退化函数H和加性噪声项 η \eta η,通过一个复原滤波器得到估计图像函数 f ^ \hat{f} f^(x,y),也表示为g(x,y)。
模型如下图:
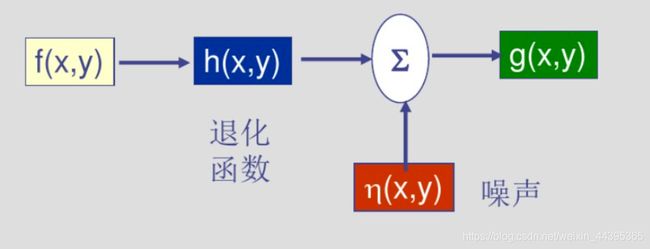
g(x,y)=h(x,y)★f(x,y)+ η \eta η(x,y),星号表示空间卷积,在频率域中,G(u,v)=H(u,v)F(u,v)+N(u,v)。
5.2.1 常见噪声概率密度函数
高斯噪声:概率密度函数呈正态分布,当均值为0,方差为1时也被称为白噪声
瑞丽噪声
爱尔兰(伽马)噪声
指数噪声
均匀噪声
脉冲(椒盐)噪声
我们这里介绍高斯噪声和椒盐噪声的概率密度函数和分布图。
高斯的PDF函数: p ( z ) = 1 2 π σ e − ( z − μ ) 2 2 σ 2 , z 是 灰 度 值 , μ 是 均 值 , σ 是 标 准 差 p(z)=\frac{1}{\sqrt {2\pi} \sigma}e^\frac{-(z-\mu)^2}{2\sigma^2},z是灰度值,\mu是均值,\sigma是标准差 p(z)=2πσ1e2σ2−(z−μ)2,z是灰度值,μ是均值,σ是标准差
服从正态分布,分布图像如下:

椒盐噪声也叫做脉冲噪声,在图像退化中看起来是许多灰度值相同的点污染了图像,椒盐噪声分为胡椒噪声和盐粒噪声,其中盐粒噪声的灰度值较大。
PDF函数:

分布图像:
如同所示,它的分布特点是双极分布。
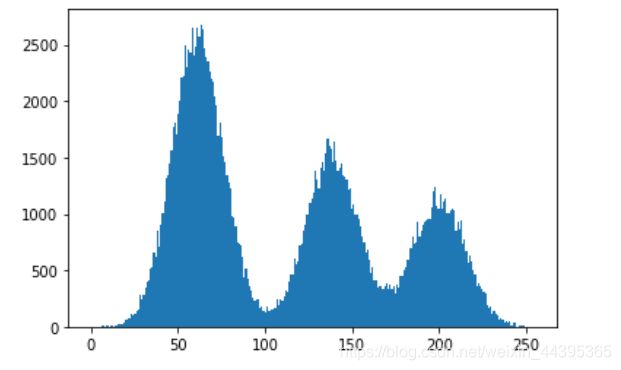
我们可以给图像加入高斯和椒盐噪声,并观察直方图。
#高斯噪声
def add_GaussNoise(image, mean=0, var=0.025):
image = np.array(image/255, np.float32)
noise = np.random.normal(mean, var, image.shape)
out = image + noise
if out.min() < 0 or out.min()==0:
low_clip = -1.
#截断函数
out = np.clip(out, low_clip, 1.0)
#恢复到原灰度范围
out = np.uint8(out*255)
return out
def addsaltpepper(img,SNR):
mask=np.zeros(img.shape,np.uint8)
print(mask.shape)
thres=1-SNR
for i in range(0,img.shape[0]):
for j in range(0,img.shape[1]):
k=random.random()
if k<SNR:
mask[i][j]=img[i][j]=0
elif k>thres:
mask[i][j]=img[i][j]=255
else:
mask[i][j]=img[i][j]
return mask
Gauss分布:
saltpepper分布:

5.2.2 周期噪声
周期噪声是在图像获取期间由电力或机电干扰产生的,周期噪声可通过频率域滤波来显著得减少,我们知道周期噪声如果是正弦函数,那么在频率域得频谱中就会呈现一对共轭脉冲,我们只要添加上对称的陷波滤波器,图像复原的效果是很好的。
img=cv.imread('pic/contaminated by sin waves.tif',0)
float_img=np.float32(img)
DFT_img = cv.dft(float_img, flags=cv.DFT_COMPLEX_OUTPUT)
DFT_center_img = np.fft.fftshift(DFT_img)
# 将两个通道放大
DFT_center_img1 = 20 * np.log(cv.magnitude(DFT_center_img[:, :, 0],DFT_center_img[:, :, 1]))
plt.subplot(121),show(img),plt.title('original image')
plt.subplot(122),show(DFT_center_img1),plt.title('spectrum')
plt.show()
冲击共轭分布:

5.3 空间滤波
我们用滤波器,也称kernel来处理像素领域的值,滤波器的种类和大小都会对图像复原产生影响。
-
算术均值滤波器: f ^ ( x , y ) = 1 m n ∑ ( s , t ) ∈ S x y g ( s , t ) \hat{f}(x,y)=\frac{1}{mn}\sum_{(s,t)\in S_{xy}} g(s,t) f^(x,y)=mn1(s,t)∈Sxy∑g(s,t)
属于平滑滤波器,降低噪声,模糊图像,适合处理高斯或均匀随机噪声 -
几何均值滤波器: f ^ ( x , y ) = [ ∏ ( s , t ) ∈ S x y g ( s , t ) ] 1 m n \hat{f}(x,y)=[\prod_{(s,t)\in S_{xy}} g(s,t)]^{\frac{1}{mn}} f^(x,y)=[(s,t)∈Sxy∏g(s,t)]mn1
与算术均值滤波器相比,丢失的图像细节较少。 -
谐波均值滤波器: f ^ ( x , y ) = m n ∑ ( s , t ) ∈ S x y 1 g ( s , t ) \hat{f}(x,y)=\frac{mn}{\sum_{(s,t)\in S_{xy}} \frac{1}{g(s,t)}} f^(x,y)=∑(s,t)∈Sxyg(s,t)1mn
擅长处理盐粒和高斯噪声 -
逆谐波均值滤波器: f ^ ( x , y ) = 1 m n ∑ ( s , t ) ∈ S x y g ( s , t ) Q + 1 g ( s , t ) Q \hat{f}(x,y)=\frac{1}{mn}\sum_{(s,t)\in S_{xy}} \frac{g(s,t)^{Q+1}}{g(s,t)^Q} f^(x,y)=mn1(s,t)∈Sxy∑g(s,t)Qg(s,t)Q+1
Q称为滤波器的阶数,Q>0,用来消除胡椒噪声,Q<0,用来消除盐粒噪声。 -
中值滤波器:适用于处理单极或双脉冲噪声
-
最值滤波器:发现图像中最暗/亮的点
-
自适应滤波器:
有4个参数:噪声和图像的灰度值,图像和噪声的方差
若两个方差高度相关,则返回噪声灰度值的近似值,若方差相等,则返回图像中相关区域的算术均值。
5.3.1 空间域滤波实验
我主要做了关于均值滤波的实验。
#实验一算术均值滤波器
def suanshu_mean(img,kernel_size):
G_mean_img=np.zeros(img.shape)
k=int((kernel_size-1)/2)
for i in range(0,img.shape[0]):
for j in range(0,img.shape[1]):
if i <k or i>(img.shape[0]-k) or j <k or j>(img.shape[1]-k):
G_mean_img[i][j]=img[i][j]
else:
for n in range(1,kernel_size):
for m in range(1,kernel_size):
G_mean_img[i][j] +=np.int32([1/(kernel_size*kernel_size)]*img[i-k+n-1][j-k+m-1])
G_mean_img = np.uint8(G_mean_img)
return G_mean_img
img04=suanshu_mean(img01,kernel_size=3)
plt.subplot(121),plt.imshow(img01),plt.title('contaminated by gauss')
plt.subplot(122),plt.imshow(img04),plt.title('suanshu filter')
plt.show()
结果如下:平滑图像且消除了高斯噪声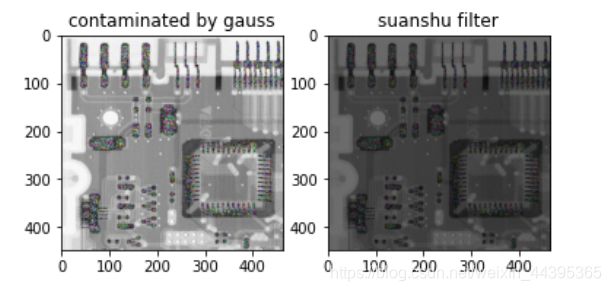
#实验二几何均值滤波器
def jihe_mean(img,kernel_size):
G_mean_img = np.ones(img.shape)
k = int((kernel_size-1)/2)
#print(k)
for i in range(img.shape[0]):
for j in range(img.shape[1]):
if i <k or i>(img.shape[0]-k-1) or j <k or j>(img.shape[1]-k-1):
G_mean_img[i][j]=img[i][j]
else:
for n in range(1,kernel_size):
for m in range(1,kernel_size):
G_mean_img[i][j]*=(img[i-k+n-1][j-k+m-1])
G_mean_img[i][j] = G_mean_img[i][j]**[1/(kernel_size*kernel_size)]
G_mean_img =np.uint8(G_mean_img)
return G_mean_img
img05=jihe_mean(img01,2)
plt.subplot(121),plt.imshow(img01),plt.title('contaminated by gauss')
plt.subplot(122),plt.imshow(img05),plt.title('jihe filter')
plt.show()
结果如图:比起算术均值滤波器,保留了更多细节,灰度值也更接近原图,效果是十分出色的。
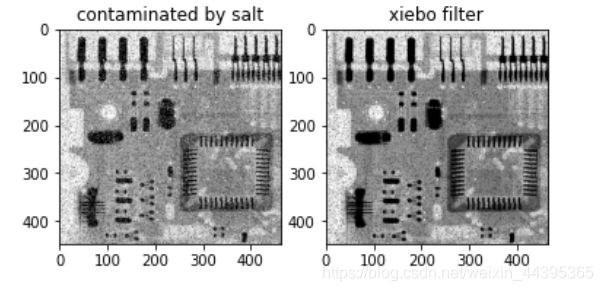
#实验三 谐波均值滤波
def xiebo_mean(img,kernel_size):
G_mean_img = np.zeros(img.shape)
k = int((kernel_size-1)/2)
for i in range(0,img.shape[0]):
for j in range(0,img.shape[1]):
if i <k or i>(img.shape[0]-k-1) or j <k or j>(img.shape[1]-k-1):
G_mean_img[i][j]=img[i][j]
else:
for n in range(kernel_size):
for m in range(kernel_size):
if img[i-k+n-1][j-k+m-1].all() ==0:
G_mean_img[i][j] = 0
break
else:
G_mean_img[i][j] +=1/(img[i-k+n-1][j-k+m-1])
else:
continue
break
if G_mean_img[i][j].all()!=0:
G_mean_img[i][j] = (kernel_size*kernel_size)/G_mean_img[i][j]
G_mean_img = np.uint8(G_mean_img)
return G_mean_img
img05=xiebo_mean(img02,1)
plt.subplot(121),plt.imshow(img03),plt.title('contaminated by salt')
plt.subplot(122),plt.imshow(img05),plt.title('xiebo filter')
plt.show()
结果如图所示:处理盐粒效果较好,但滤波器不宜大,否则效果不好,3 * 3的滤波器效果很差,我所用的是1*1的
#实验四逆谐波均值滤波器
def re_mean(img,kernel_size,Q):
G_mean_img = np.zeros(img.shape)
#print(G_mean_img[0][0])
#print(img)
k = int((kernel_size-1)/2)
#print(k)
for i in range(img.shape[0]):
for j in range(img.shape[1]):
if i <k or i>(img.shape[0]-k-1) or j <k or j>(img.shape[1]-k-1):
G_mean_img[i][j]=img[i][j]
else:
result_top = 0
result_down = 0
for n in range(kernel_size):
for m in range(kernel_size):
if Q>0:
result_top +=pow((img[i-k+n-1][j-k+m-1]),Q+1)
result_down +=pow((img[i-k+n-1][j-k+m-1]),Q)
else:
if img[i-k+n-1][j-k+m-1].all()==0:
G_mean_img[i][j] = 0
break
else:
result_top +=pow((img[i-k+n-1][j-k+m-1]),Q+1)
result_down +=pow((img[i-k+n-1][j-k+m-1]),Q)
else:
continue
break
else:
if result_down.all() !=0:
G_mean_img[i][j] = result_top/result_down
G_mean_img = np.uint8(G_mean_img)
return G_mean_img
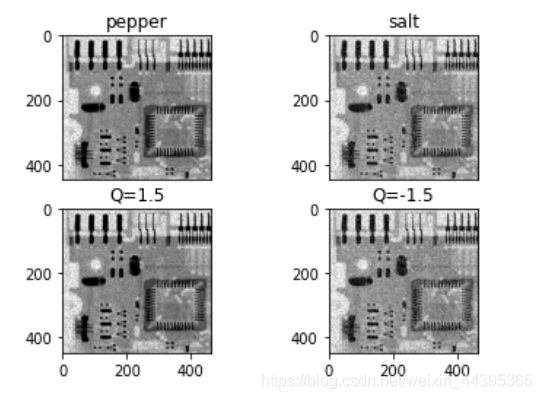
img07=re_mean(img02,1,1.5)
img08=re_mean(img03,1,-1.5)
plt.subplot(221),plt.imshow(img02),plt.title('pepper'),plt.xticks([])
plt.subplot(222),plt.imshow(img03),plt.title('salt'),plt.xticks([])
plt.subplot(223),plt.imshow(img07),plt.title('Q=1.5')
plt.subplot(224),plt.imshow(img08),plt.title('Q=-1.5')
plt.show()
结果如下:Q>0适合处理胡椒噪声,Q<0适合处理盐粒噪声,如果Q的正负出错了会给图像造成灾难性的污染。
5.4 频率域消除周期噪声
5.2.2节中介绍了频率域中周期噪声频谱的特点(假设噪声是正弦信号),即周期复共轭的冲击脉冲,我们根据这一特点,使用带通,带阻和和陷波滤波器均可以达到消除周期噪声的效果,这一节,我会使用带阻滤波器,滤波器的特点在第四章的博客中写过,这里不再重复了。
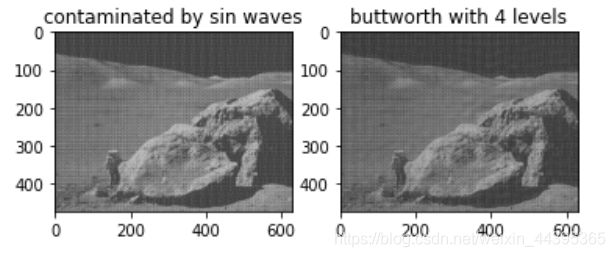
带阻滤波器通过设置适当的半径和宽度,包围噪声脉冲,我这里使用4阶布特沃斯型的带阻滤波器。表达式如下: H ( u , v ) = 1 1 + [ D W D 2 − D 0 2 ] 2 n H(u,v)=\frac{1}{1+[\frac{DW}{D^2-D_0^2}]^{2n}} H(u,v)=1+[D2−D02DW]2n1
式子得出,离截止频率近,滤波器额值趋于0。
w是带宽,D是D(u,v)距滤波器中心的距离,D 0 _0 0是截止频率。
基本流程:

import cv2
import numpy as np
import math
from matplotlib import pyplot as plt
img = cv2.imread('pic/contaminated by sin waves.tif',0)
show(img)
def buttworth(img,D0,w):
img_float32 = np.float32(img)
dft = cv2.dft(img_float32, flags=cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
rows, cols = img.shape
crow, ccol = int(rows / 2), int(cols / 2)
buttworth = np.ones((rows, cols,2), np.uint8)
for i in range(0, rows):
for j in range(0, cols):
d = math.sqrt(pow(i - crow, 2) + pow(j - ccol, 2))
if D0 - w / 2 < d < D0 + w / 2 and (d*d-D0*D0)!=0:
buttworth[i,j,0]=buttworth[i,j,1]=(1/(1+(pow(d*w/(d*d-D0*D0),4))))
else:
buttworth[i,j,0]=buttworth[i,j,1]=1
f = dft_shift * buttworth
ishift = np.fft.ifftshift(f)
iimg = cv2.idft(ishift)
res = cv2.magnitude(iimg[:, :, 0], iimg[:, :, 1])
return res
img01=buttworth(img,20,5)
plt.subplot(121),show(img),plt.title('contaminated by sin waves')
plt.subplot(122),show(img01),plt.title('buttworth with 4 levels')
plt.show()
结果如图:肉眼不太好观察,应有一部分周期噪声被滤除
5.5 图像的逆滤波
逆滤波:

要注意退化函数为零或为非常小的情况,一种方法是限制滤波的频率,使其接近原点。
维也纳滤波:
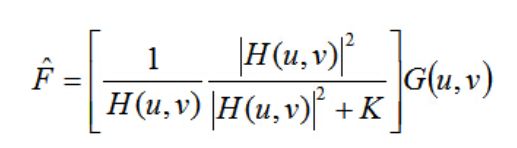
K值的交互式选择是为了找到最好的视觉效果。
总结
本章主要从图像复原的角度介绍了众多噪声模型和滤波器模型,不同滤波器的特点和参数要搞清楚,对于滤波器的模型编码能力要加强。