线性代数笔记-线性空间和矩阵复习
复习思路
这次复习线性代数是为了给机器学习、数值分析、最优化理论三门课程打基础(这三门课程里面的矩阵使用实在太多、太深)。具体来说是要对行列式、矩阵运算、矩阵分解、线性变换里面的基础概念记忆。纸质的笔记仅列出概念,要求自己看到后能理解,算是对复习效果的自测。有时间的话把详细内容放在知乎上,以便以后复习。这次疫情我什么书也没带,因此深切感受到把笔记放在网上的重要性。
线性代数的问题是解线性方程组,记忆概念最好围绕具体解方程的问题展开。我一直不太赞同很多数学书前言中提出的
要用数学严谨、全面的思维学习
我反而比较认同3Brown1Blue制作人Grant的观点。
学习一个数学概念的时候开始可以只学习简陋的(甚至错误的)结论,在使用和之后的学习过程中不断地完善这个结论

之前已经学过线性代数,用的国外教材(Linear Algebra and It’s Application),感觉这本书浅显易懂,而且作者举了很多实际科研应用中的例子.书里面讲解的内容都很基础,没有专门对付考试的套路.这次想找丘维声的高等代数来看看,很多比较难的地方就跳过去了,全当回忆基础概念.
基础介绍
- 线性代数是对解方程和线性空间/线性映射的讨论
- 集合上映射的定义:像、原像、定义域、培域
- 满射、单设、双射
- 映射的乘积:结合律
- 恒等映射,集合A上记作 1 A 1_A 1A
- 逆映射、可逆映射、左满右单、冲有条件
第一章 线性方程组解法
- 线性代数的出发点和矩阵的提出都源自n元线性方程组。核心问题就是怎么解方程(一直记得大一时,老师说这句话时,我心想这也太简单了……现在想起来当年还是naive)
- 方程组的初等变换、阶梯形方程组、同解定义
- 增广矩阵、阶梯形矩阵、矩阵初等换变换、主元
- 简化行阶梯形矩阵(作用)
- 判断n元线性方程组无解、有解(1个/无数个)
- 齐次线性方程->系数矩阵
- 零解、非零解(无数个姐)
行列式
一、意义:
我们已经知道高斯消元法解n个n元方程组,这一套方法自成体系,完全可以解决解方程的问题.现在我们想用系数矩阵的性质直接判断齐次方程组是否有唯一解.
二、.逆序数
1.逆序数:在一个排列中,逆序的数量即为一个排列的逆序数,记为 τ ( 排 列 ) \tau(排列) τ(排列).
例如排列2431,其中逆序为43、12、13、14。那么 τ ( 2431 ) = 4 \tau(2431) = 4 τ(2431)=4
偶排列和奇排列:逆序数为偶数为偶排列,否则为奇排列。
2.定理:对换改变排列的奇偶性。
3.定理:任一n元排列与排列1,2,……,n可以经过一系列对换互变,并且所作对换的次数与这个n原排列有相同的奇偶性。
4.定理:在全部n原排列(n > 1)中,奇偶排列各占一半
三、行列式
1.定义:n阶矩阵 A = ( a i j ) A = (a_{ij}) A=(aij)的行列式为
∣ a 11 ⋯ a 1 n ⋮ ⋮ a n 1 ⋯ a n n ∣ = ∑ j 1 j 2 ⋯ j n ( − 1 ) τ ( j 1 j 2 ⋯ j n ) a 1 j 1 a 2 j 2 ⋯ a n j n \left| \begin{matrix} a_{11}& \cdots& a_{1n}\\ \vdots& \quad& \vdots\\ a_{n1}& \cdots& a_{nn} \end{matrix} \right|= \sum_{j_1 j_2 \cdots j_n} (-1)^{\tau(j_1 j_2 \cdots j_n)} a_{1j_1}a_{2j_2}\cdots a_{nj_n} ∣∣∣∣∣∣∣a11⋮an1⋯⋯a1n⋮ann∣∣∣∣∣∣∣=j1j2⋯jn∑(−1)τ(j1j2⋯jn)a1j1a2j2⋯anjn
其中 j 1 j 2 ⋯ j n j_1j_2\cdots j_n j1j2⋯jn表示取遍所有的n元排列
例如二阶矩阵 A = ( a 11 a 12 a 21 a 22 ) A = \begin{pmatrix} a_{11}& a_{12}\\ a_{21}& a_{22}\\ \end{pmatrix} A=(a11a21a12a22),的行列式有2!项。结果为 a 12 a 22 + a 12 a 21 a_{12}a_{22} + a_{12}a_{21} a12a22+a12a21
更一般形式推导: ∣ A ∣ |A| ∣A∣中的每一项为 ( − 1 ) τ ( j 1 j 2 ⋯ j n ) a 1 j 1 a 2 j 2 ⋯ a n j n (-1)^{\tau(j_1j_2\cdots j_n)}a_{1j_1}a_{2j_2}\cdots a_{nj_n} (−1)τ(j1j2⋯jn)a1j1a2j2⋯anjn
考虑重新排列 a 1 j 1 a 2 j 2 ⋯ a n j n a_{1j_1}a_{2j_2}\cdots a_{nj_n} a1j1a2j2⋯anjn为 a i 1 k 1 a i 2 k 2 ⋯ a i n k n a_{i_1k_1}a_{i_2k_2}\cdots a_{i_nk_n} ai1k1ai2k2⋯ainkn
可以证明 ( − 1 ) τ ( j 1 j 2 ⋯ j n ) a 1 j 1 a 2 j 2 ⋯ a n j n = ( − 1 ) τ ( i 1 i 2 ⋯ i n ) + τ ( k 1 k 2 ⋯ k n ) a i 1 k 1 a i 2 k 2 ⋯ a i n k n (-1)^{\tau(j_1j_2\cdots j_n)}a_{1j_1}a_{2j_2}\cdots a_{nj_n} = (-1)^{\tau(i_1i_2\cdots i_n) + \tau(k_1k_2 \cdots k_n)}a_{i_1k_1}a_{i_2k_2}\cdots a_{i_nk_n} (−1)τ(j1j2⋯jn)a1j1a2j2⋯anjn=(−1)τ(i1i2⋯in)+τ(k1k2⋯kn)ai1k1ai2k2⋯ainkn
因此可以得到
∣ A ∣ = ∑ i 1 i 2 ⋯ i n ( − 1 ) τ ( i 1 i 2 ⋯ j n ) + τ ( k 1 k 2 ⋯ k n ) a i 1 k 1 a i 2 k 2 ⋯ a i n k n |A| = \sum_{i_1i_2 \cdots i_n} (-1)^{\tau(i_1i_2 \cdots j_n) + \tau(k_1k_2\cdots k_n)} a_{i_1k_1}a_{i_2k_2}\cdots a_{i_nk_n} ∣A∣=i1i2⋯in∑(−1)τ(i1i2⋯jn)+τ(k1k2⋯kn)ai1k1ai2k2⋯ainkn
2.按行(列)展开的形式表示行列式:
余子式:n级矩阵 A = ( a i j ) A = (a_{ij}) A=(aij),划去第i行第j列,剩下的元素按原来的次序排列成n - 1级矩阵,剩下的矩阵的行列式称为余子式,记为 M i j M_{ij} Mij。令 A i j = ( − 1 ) i + j M i j A_{ij} = (-1)^{i + j} M_{ij} Aij=(−1)i+jMij称为代数余子式
行列式:行列式|A|等于第i行元素与自己的代数余子式乘积之和
∣ A ∣ = ∑ j = 1 n a i j M i j |A| = \sum^n_{j = 1} a_{ij}M_{ij} ∣A∣=j=1∑naijMij
注:对任意一列也可以做相同的展开得到行列式。
4.行列式性质
性质1: ∣ A ∣ = ∣ A T ∣ |A| = |A^T| ∣A∣=∣AT∣
性质2:矩阵A某一行乘上系数k得到矩阵B,则 ∣ B ∣ = k ∣ A ∣ |B| = k|A| ∣B∣=k∣A∣
∣ a 11 ⋯ a 1 n ⋮ ⋮ k a i 1 ⋯ k a i n ⋮ ⋮ a n 1 ⋯ a n n ∣ = k ∣ a 11 ⋯ a 1 n ⋮ ⋮ a i 1 ⋯ a i n ⋮ ⋮ a n 1 ⋯ a n n ∣ \left| \begin{matrix} a_{11}& \cdots& a_{1n}\\ \vdots& \quad& \vdots\\ ka_{i1}& \cdots& ka_{in}\\ \vdots& \quad& \vdots\\ a_{n1}& \cdots& a_{nn} \end{matrix} \right| = k \left| \begin{matrix} a_{11}& \cdots& a_{1n}\\ \vdots& \quad& \vdots\\ a_{i1}& \cdots& a_{in}\\ \vdots& \quad& \vdots\\ a_{n1}& \cdots& a_{nn} \end{matrix} \right| ∣∣∣∣∣∣∣∣∣∣∣∣a11⋮kai1⋮an1⋯⋯⋯a1n⋮kain⋮ann∣∣∣∣∣∣∣∣∣∣∣∣=k∣∣∣∣∣∣∣∣∣∣∣∣a11⋮ai1⋮an1⋯⋯⋯a1n⋮ain⋮ann∣∣∣∣∣∣∣∣∣∣∣∣
性质3:
∣ a 11 ⋯ a 1 n ⋮ ⋮ b i 1 + c i 1 ⋯ b i n + c i n ⋮ ⋮ a n 1 ⋯ a n n ∣ = ∣ a 11 ⋯ a 1 n ⋮ ⋮ b i 1 ⋯ b i n ⋮ ⋮ a n 1 ⋯ a n n ∣ + ∣ a 11 ⋯ a 1 n ⋮ ⋮ c i 1 ⋯ c i n ⋮ ⋮ a n 1 ⋯ a n n ∣ \left| \begin{matrix} a_{11}& \cdots& a_{1n}\\ \vdots& \quad& \vdots\\ b_{i1} + c_{i1}& \cdots& b_{in} + c_{in}\\ \vdots& \quad& \vdots\\ a_{n1}& \cdots& a_{nn} \end{matrix} \right| = \left| \begin{matrix} a_{11}& \cdots& a_{1n}\\ \vdots& \quad& \vdots\\ b_{i1}& \cdots& b_{in}\\ \vdots& \quad& \vdots\\ a_{n1}& \cdots& a_{nn} \end{matrix} \right| + \left| \begin{matrix} a_{11}& \cdots& a_{1n}\\ \vdots& \quad& \vdots\\ c_{i1}& \cdots& c_{in}\\ \vdots& \quad& \vdots\\ a_{n1}& \cdots& a_{nn} \end{matrix} \right| ∣∣∣∣∣∣∣∣∣∣∣∣a11⋮bi1+ci1⋮an1⋯⋯⋯a1n⋮bin+cin⋮ann∣∣∣∣∣∣∣∣∣∣∣∣=∣∣∣∣∣∣∣∣∣∣∣∣a11⋮bi1⋮an1⋯⋯⋯a1n⋮bin⋮ann∣∣∣∣∣∣∣∣∣∣∣∣+∣∣∣∣∣∣∣∣∣∣∣∣a11⋮ci1⋮an1⋯⋯⋯a1n⋮cin⋮ann∣∣∣∣∣∣∣∣∣∣∣∣
性质4:矩阵A对换两行得到矩阵C,则 ∣ C ∣ = − ∣ A ∣ |C| = -|A| ∣C∣=−∣A∣
∣ a 11 ⋯ a 1 n ⋮ ⋮ a k 1 ⋯ a k n ⋮ ⋮ a i 1 ⋯ a i n ⋮ ⋮ a n 1 ⋯ a n n ∣ = − ∣ a 11 ⋯ a 1 n ⋮ ⋮ a i 1 ⋯ a i n ⋮ ⋮ a k 1 ⋯ a k n ⋮ ⋮ a n 1 ⋯ a n n ∣ \left| \begin{matrix} a_{11}& \cdots& a_{1n}\\ \vdots& \quad& \vdots\\ a_{k1}& \cdots& a_{kn}\\ \vdots& \quad& \vdots\\ a_{i1}& \cdots& a_{in}\\ \vdots& \quad& \vdots\\ a_{n1}& \cdots& a_{nn} \end{matrix} \right| = - \left| \begin{matrix} a_{11}& \cdots& a_{1n}\\ \vdots& \quad& \vdots\\ a_{i1}& \cdots& a_{in}\\ \vdots& \quad& \vdots\\ a_{k1}& \cdots& a_{kn}\\ \vdots& \quad& \vdots\\ a_{n1}& \cdots& a_{nn} \end{matrix} \right| ∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣a11⋮ak1⋮ai1⋮an1⋯⋯⋯⋯a1n⋮akn⋮ain⋮ann∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣=−∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣a11⋮ai1⋮ak1⋮an1⋯⋯⋯⋯a1n⋮ain⋮akn⋮ann∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
性质5:两行成比例(包括相同),行列式相等
性质6:把矩阵A一行的倍数加到另一行上得到矩阵D(矩阵的基本变换),则 ∣ D ∣ = ∣ A ∣ |D| = |A| ∣D∣=∣A∣
∣ a 11 ⋯ a 1 n ⋮ ⋮ a k 1 ⋯ a k n ⋮ ⋮ a i 1 + l a k 1 ⋯ a i n + l a k n ⋮ ⋮ a n 1 ⋯ a n n ∣ = ∣ a 11 ⋯ a 1 n ⋮ ⋮ a k 1 ⋯ a k n ⋮ ⋮ a i 1 ⋯ a i n ⋮ ⋮ a n 1 ⋯ a n n ∣ \left| \begin{matrix} a_{11}& \cdots& a_{1n}\\ \vdots& \quad& \vdots\\ a_{k1}& \cdots& a_{kn}\\ \vdots& \quad& \vdots\\ a_{i1} + la_{k1}& \cdots& a_{in} + la_{kn}\\ \vdots& \quad& \vdots\\ a_{n1}& \cdots& a_{nn} \end{matrix} \right| = \left| \begin{matrix} a_{11}& \cdots& a_{1n}\\ \vdots& \quad& \vdots\\ a_{k1}& \cdots& a_{kn}\\ \vdots& \quad& \vdots\\ a_{i1}& \cdots& a_{in}\\ \vdots& \quad& \vdots\\ a_{n1}& \cdots& a_{nn} \end{matrix} \right| ∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣a11⋮ak1⋮ai1+lak1⋮an1⋯⋯⋯⋯a1n⋮akn⋮ain+lakn⋮ann∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣=∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣a11⋮ak1⋮ai1⋮an1⋯⋯⋯⋯a1n⋮akn⋮ain⋮ann∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
线性空间
一、意义
行列式给出了n个n元方程组有无唯一解的判断。对于m个n元方程的解我们还不清楚,而研究线性空间和线性空间的向量就可以判断该方程组解的情况,并且用向量表示出解空间
二、线性空间的基本概念
1.定义线性空间:线性空间就是要在空间上定义加法和数乘两种运算,然后然运算满足8种性质
2.定义行向量和列向量:其实向量到底是行还是列不重要,重要的是要统一记号,比如行向量这样写 a ⃗ = ( a 1 , a 2 , ⋯ , a n ) \vec{a} = (a_1, a_2, \cdots, a_n) a=(a1,a2,⋯,an),而列向量写成:
a ⃗ = ( a 1 a 2 ⋮ a n ) \vec{a} = \begin{pmatrix} a_1\\ a_2\\ \vdots\\ a_n \end{pmatrix} a=⎝⎜⎜⎜⎛a1a2⋮an⎠⎟⎟⎟⎞
3.定义子空间:在原本的线性空间上对加法和数乘封闭
4.向量组 a 1 ⃗ , ⋯ , a n ⃗ \vec{a_1}, \cdots, \vec{a_n} a1,⋯,an:这个概念包括了线性组合,生成子空间 < a 1 ⃗ , ⋯ , a n ⃗ > <\vec{a_1}, \cdots, \vec{a_n}> <a1,⋯,an>。
注:组和空间都是一个集合
向量组 a 1 ⃗ , a 2 ⃗ , ⋯ , a n ⃗ \vec{a_1}, \vec{a_2}, \cdots, \vec{a_n} a1,a2,⋯,an的线性组合表示方程组: k 1 a 1 ⃗ + k 2 a 2 ⃗ + ⋯ + k n a n ⃗ = β ⃗ k_1\vec{a_1} + k_2\vec{a_2} + \cdots + k_n\vec{a_n} = \vec{\beta} k1a1+k2a2+⋯+knan=β
注:可以把这个式子看成矩阵乘列向量 A k ⃗ = β ⃗ A\vec{k} = \vec{\beta} Ak=β,这就把解方程组的问题彻底转化成了矩阵和线性空间的问题
三、解的推导
1.线性相关充要条件:向量组 a 1 ⃗ , a 2 ⃗ , ⋯ , a n ⃗ , A = ( a 1 ⃗ , a 2 ⃗ , ⋯ , a n ⃗ ) \vec{a_1}, \vec{a_2}, \cdots, \vec{a_n},A = (\vec{a_1}, \vec{a_2}, \cdots, \vec{a_n}) a1,a2,⋯,an,A=(a1,a2,⋯,an):
(1)齐次方程组 x 1 a 1 ⃗ + x 2 a 2 ⃗ + ⋯ + x n a n ⃗ = 0 x_1\vec{a_1} + x_2\vec{a_2} + \cdots + x_n\vec{a_n} = 0 x1a1+x2a2+⋯+xnan=0有非零解
(2)|A| = 0
2.线性相关/无关条件:类似的等价关系都是从行列式,方程组解的角度考虑
(1)若 a 1 ⃗ , a 2 ⃗ , ⋯ , a n ⃗ \vec{a_1}, \vec{a_2}, \cdots, \vec{a_n} a1,a2,⋯,an线性无关,则给每个向量加上m个维度向量组还是线性无关
比如给(0, 1),(1, 0)加上一个维度变成(0, 1, 1),(1, 0, 1)两个向量还是线性无关
(2)类似的,如果向量组线性相关,减掉m个维度也线性形相关
(3)过渡矩阵:如果向量组 a 1 ⃗ , ⋯ , a n ⃗ \vec{a_1}, \cdots, \vec{a_n} a1,⋯,an线性无关,且
β 1 ⃗ = b 11 a 1 ⃗ + ⋯ + b n 1 a n ⃗ ⋮ β n ⃗ = b 1 n a 1 ⃗ + ⋯ + b n n a n ⃗ \vec{\beta_1} = b_{11}\vec{a_1} + \cdots + b_{n1}\vec{a_n}\\ \vdots\\ \vec{\beta_n} = b_{1n}\vec{a_1} + \cdots + b_{nn}\vec{a_n} β1=b11a1+⋯+bn1an⋮βn=b1na1+⋯+bnnan
则向量组 β 1 ⃗ , ⋯ , β n ⃗ \vec{\beta_1}, \cdots, \vec{\beta_n} β1,⋯,βn线性无关的充要条件是过渡矩阵|P| = 0,即
∣ P ∣ = ∣ b 11 ⋯ b 1 n ⋮ ⋮ b n 1 ⋯ b n n ∣ = 0 |P| = \left| \begin{matrix} b_{11}& \cdots& b_{1n}\\ \vdots& \quad& \vdots\\ b_{n1}& \cdots& b_{nn} \end{matrix} \right| = 0 ∣P∣=∣∣∣∣∣∣∣b11⋮bn1⋯⋯b1n⋮bnn∣∣∣∣∣∣∣=0
注:这个过渡矩阵一般用在之后的换线性空间的基的时候
3.秩:向量组的秩$rank{a_1, \cdots, a_n} = $极大线性无关组的向量个数
秩判断方程组解定理:如果向量组 a 1 ⃗ , ⋯ , a n ⃗ \vec{a_1}, \cdots, \vec{a_n} a1,⋯,an和 a 1 ⃗ , ⋯ , a n ⃗ , β ⃗ \vec{a_1}, \cdots, \vec{a_n}, \vec{\beta} a1,⋯,an,β秩相等则方程组 x 1 a 1 ⃗ + ⋯ + x n a n ⃗ = β ⃗ x_1\vec{a_1} + \cdots + x_n\vec{a_n} = \vec{\beta} x1a1+⋯+xnan=β有解
4.线性空间V的基S:向量组S线性无关,且能线性表示空间中所有的向量
例如:二维空间中的(1, 0), (0, 1)
定理:线性空间的维度 d i m V = dim V = dimV= 基中的向量个数
行秩和列秩:矩阵的行向量的秩 = 矩阵的列向量的秩(感觉这个证明还是很重要的,很多初等变换和矩阵证明手法都用到了)
定理: r a n k { A } = r a n k { A ′ } rank\{A\} = rank\{A'\} rank{A}=rank{A′}
定理:非零矩阵的秩等于它不为0子式(本质上是子矩阵的行列式)的最高阶数
对于n阶方阵A: r a n k { A } = n rank\{A\} = n rank{A}=n等价于 ∣ A ∣ ≠ 0 |A| \neq 0 ∣A∣=0
5.(回答本章的问题)方程组有解的充要条件:增广矩阵和系数矩阵的秩相等(根据秩判断方程组解定理已经很容易看出)。下证:
x 1 a 1 ⃗ + ⋯ + x n a n ⃗ = β ⃗ ⇔ β ⃗ ∈ < a 1 ⃗ , ⋯ , a n ⃗ > ⇔ r a n k { a 1 ⃗ , ⋯ , a n ⃗ , β ⃗ } = r a n k { a 1 ⃗ , ⋯ , a n ⃗ } ⇔ 增 广 矩 阵 秩 = 系 数 矩 阵 秩 \begin{aligned} &x_1\vec{a_1} + \cdots + x_n\vec{a_n} = \vec{\beta}\\ \Leftrightarrow &\vec{\beta} \in <\vec{a_1}, \cdots, \vec{a_n}>\\ \Leftrightarrow &rank\{\vec{a_1}, \cdots, \vec{a_n}, \vec{\beta}\}= rank\{\vec{a_1}, \cdots, \vec{a_n}\}\\ \Leftrightarrow&增广矩阵秩 = 系数矩阵秩 \end{aligned} ⇔⇔⇔x1a1+⋯+xnan=ββ∈<a1,⋯,an>rank{a1,⋯,an,β}=rank{a1,⋯,an}增广矩阵秩=系数矩阵秩
系数矩阵判断:n元线性方程组系数矩阵A,如果rank{A} = n,则有唯一解,若小于n有无数解
6.(回答本章问题)解方程的办法(n元齐次方程组,系数矩阵A)
解空间W是线性空间 R n R^n Rn的子空间,因此用基表示W,且dim W = n - rank(A)
(1)将A化简为简约阶梯型,不妨设主元在前n列 1 , 2 , ⋯ , r 1, 2, \cdots, r 1,2,⋯,r
(2)得到解的统一表示,其中 x r + 1 , ⋯ , x n x_{r + 1}, \cdots, x_n xr+1,⋯,xn可以是任何数
{ x 1 = b 1 r + 1 x r + 1 − ⋯ − b 1 n x n x 2 = b 2 r + 1 x r + 1 − ⋯ − b 2 n x n ⋮ x r = b r r + 1 x r + 1 − ⋯ − b r n x n \begin{cases} x_1 = b_{1r+1}x_{r + 1} - \cdots -b_{1n}x_{n}\\ x_2 = b_{2r+1}x_{r + 1} - \cdots -b_{2n}x_{n}\\ \vdots\\ x_r = b_{rr+1}x_{r+1} - \cdots -b_{rn}x_{n} \end{cases} ⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧x1=b1r+1xr+1−⋯−b1nxnx2=b2r+1xr+1−⋯−b2nxn⋮xr=brr+1xr+1−⋯−brnxn
(3)不妨给 x r + 1 , ⋯ , x n x_{r + 1}, \cdots, x_n xr+1,⋯,xn取n - r个不同的值分别为
( 1 0 ⋮ 0 ) ( 0 1 ⋮ 0 ) ⋯ ( 0 0 ⋮ 1 ) \begin{pmatrix} 1\\0\\ \vdots\\0 \end{pmatrix} \begin{pmatrix} 0\\1\\ \vdots\\0 \end{pmatrix} \cdots \begin{pmatrix} 0\\0\\\vdots\\1 \end{pmatrix} ⎝⎜⎜⎜⎛10⋮0⎠⎟⎟⎟⎞⎝⎜⎜⎜⎛01⋮0⎠⎟⎟⎟⎞⋯⎝⎜⎜⎜⎛00⋮1⎠⎟⎟⎟⎞
(4)得到的n - r个解向量组 η 1 , ⋯ , η n − r \eta_1, \cdots, \eta_{n - r} η1,⋯,ηn−r
( − b 1 r + 1 − b 2 r + 1 ⋮ − b r r + 1 1 0 ⋮ 0 ) ⋯ ( − b 1 n − b 2 n ⋮ − b r n 0 0 ⋮ 1 ) \begin{pmatrix} -b_{1r+1}\\ -b_{2r+1}\\ \vdots \\-b_{rr+1}\\1\\0\\ \vdots \\ 0 \end{pmatrix} \cdots \begin{pmatrix} -b_{1n}\\ -b_{2n}\\ \vdots \\-b_{rn}\\0\\0\\ \vdots \\ 1 \end{pmatrix} ⎝⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎛−b1r+1−b2r+1⋮−brr+110⋮0⎠⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎞⋯⎝⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎛−b1n−b2n⋮−brn00⋮1⎠⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎞
(5)下证明所有解都可以由上述解向量组线性表示
η = ( c 1 c 2 ⋮ c n ) { c 1 = − b 1 r + 1 c r + 1 − ⋯ − b 1 n c n c 2 = − b 2 r + 1 c r + 1 − ⋯ − b 2 n c n ⋮ c r = − b r r + 1 c r + 1 − ⋯ − b r n c n \eta = \begin{pmatrix} c_1\\ c_2\\ \vdots \\c_n \end{pmatrix} \begin{cases} c_1 = -b_{1r+1}c_{r+1} - \cdots -b_{1n}c_n\\ c_2 = -b_{2r+1}c_{r+1} - \cdots -b_{2n}c_n\\ \vdots\\ c_r = -b_{rr+1}c_{r+1} - \cdots -b_{rn}c_n \end{cases} η=⎝⎜⎜⎜⎛c1c2⋮cn⎠⎟⎟⎟⎞⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧c1=−b1r+1cr+1−⋯−b1ncnc2=−b2r+1cr+1−⋯−b2ncn⋮cr=−brr+1cr+1−⋯−brncn
显然,可以由解向量组表示 η = c r + 1 η 1 + c r + 2 η 2 + ⋯ + c n η n − r \eta = c_{r + 1}\eta_1 + c_{r + 2}\eta_{2} + \cdots + c_{n}\eta_{n - r} η=cr+1η1+cr+2η2+⋯+cnηn−r
得到解空间W的描述,即向量组 η 1 , ⋯ , η n − r \eta_1, \cdots, \eta_{n - r} η1,⋯,ηn−r
非齐次方程:解出一个特解,然后去掉常数项变成齐次方程解出一组基,将特解加到基上即可得到结果。
四、更深入的话题
1.定义线性子空间中+运算(满足交换律,结合律):
V 1 + V 2 = { α 1 + α 2 ∣ α 1 ∈ V 1 , α 2 ∈ V 2 } V_1 + V_2 = \{\alpha_1 + \alpha_2| \alpha_1 \in V_1, \alpha_2 \in V_2\} V1+V2={α1+α2∣α1∈V1,α2∈V2}
线性子空间的交 ∩ \cap ∩运算,加 + + +运算结果为线性子空间
2.维度公式: d i m ( V 1 + V 2 ) = d i m V 1 + d i m V 2 − d i m ( V 1 ∩ V 2 ) dim(V_1 + V_2) = dimV_1 + dimV_2 - dim(V_1 \cap V_2) dim(V1+V2)=dimV1+dimV2−dim(V1∩V2)
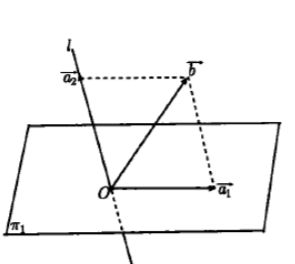
3.定义直和: V 1 , V 2 V_1, V_2 V1,V2是数域K上的线性空间V的子空间,如果
∀ α ⃗ ∈ V 1 + V 2 α ⃗ = α ⃗ 1 + α ⃗ 2 α ⃗ 1 ∈ V 1 α ⃗ 2 ∈ V 2 \forall \vec{\alpha} \in V_1 + V_2\\ \vec{\alpha} = \vec{\alpha}_1 + \vec{\alpha}_2 \quad \vec{\alpha}_1 \in V_1\, \vec{\alpha}_2 \in V_2 ∀α∈V1+V2α=α1+α2α1∈V1α2∈V2
则 V 1 + V 2 V_1 + V_2 V1+V2为直和,记作 V 1 ⊕ V 2 V_1 \oplus V_2 V1⊕V2,如下图
直和的等价条件:
(1) V 1 + V 2 V_1 + V_2 V1+V2是直和
(2) V 1 + V 2 V_1 + V_2 V1+V2中零向量表示法唯一
(3) V 1 ∩ V 2 = 0 V_1 \cap V_2 = 0 V1∩V2=0
(4) V 1 , V 2 V_1, V_2 V1,V2的基 S 1 , S 2 S_1, S_2 S1,S2合起来是 V 1 + V 2 V_1 + V_2 V1+V2的一个基
(5) d i m ( V 1 + V 2 ) = d i m V 1 + d i m V 2 dim(V_1 + V_2) = dimV_1 + dimV_2 dim(V1+V2)=dimV1+dimV2
4.定义补空间:如果 V 1 ⊕ V 2 V_1 \oplus V_2 V1⊕V2则 V 1 V_1 V1和 V 2 V_2 V2互为补空间
定理: V 1 , V 2 V_1, V_2 V1,V2的基合起来是V的基,则 V = V 1 ⊕ V 2 V = V_1 \oplus V_2 V=V1⊕V2
5.定义同构映射: ∃ σ : V → V ′ \exist \sigma:V \rightarrow V' ∃σ:V→V′满足下面条件,则V和V’是同构的
σ ( α + β ) = σ ( α ) + σ ( β ) σ ( k α ) = k σ ( α ) \sigma(\alpha + \beta) = \sigma(\alpha) + \sigma(\beta)\\ \sigma(k\alpha) = k\sigma(\alpha) σ(α+β)=σ(α)+σ(β)σ(kα)=kσ(α)
基相等定理:如果 α ⃗ 1 , ⋯ , α ⃗ n \vec{\alpha}_1, \cdots, \vec{\alpha}_n α1,⋯,αn是V的基则 σ ( α ⃗ 1 ) , ⋯ , σ ( α ⃗ n ) \sigma(\vec{\alpha}_1), \cdots, \sigma(\vec{\alpha}_n) σ(α1),⋯,σ(αn)是V’的基
同构充分条件:两个空间维数相等
建立同构:数域K上任意n维线性空间与 K n K^n Kn同构,同构映射即 V 中 向 量 → K n V中向量\rightarrow K^n V中向量→Kn中的坐标
等价关系:同构关系是所有线性空间组成的集合上的等价关系
6.陪集(讨论一个线性空间内的等价关系)
(1)定义等价二元等价关系 β ⃗ ∼ α ⃗ \vec{\beta} \sim\vec{\alpha} β∼α: β ⃗ − α ⃗ ∈ W \vec{\beta} - \vec{\alpha}\in W β−α∈W(W为V的线性子空间)
(2)构造划分:满足二元等价关系的所有 α ⃗ \vec{\alpha} α组成集合 U W U_W UW,所有的U就是线性空间V的一个划分
(3)定义陪集:把 U W U_W UW称为子空间W的陪集,记为 α + W \alpha + W α+W,称 α \alpha α为这个陪集的代表
注:W可以有很多陪集,这些陪集就是线性空间的划分
7.商集:W所有等价类组成的集合称为V的一个商集,记为V/W,表示为 V / W = { α + W ∣ α ∈ W } V/W = \{\alpha + W| \alpha \in W\} V/W={α+W∣α∈W}
注:商集是的元素是集合
商空间:可证V/W是数域K上的线性空间,被称为V对于子空间W的商空间
定理: d i m ( V / M ) = d i m V − d i m W dim(V/M) = dimV - dimW dim(V/M)=dimV−dimW
定理:W是V的子空间,如果商空间V/W的一个基为 β ⃗ 1 + W , ⋯ , β ⃗ t + W \vec{\beta}_1 + W, \cdots, \vec{\beta}_t + W β1+W,⋯,βt+W,令 B = < β 1 , ⋯ , β t > B = <\beta_1, \cdots, \beta_t> B=<β1,⋯,βt>,则 V = W ⊕ U V = W \oplus U V=W⊕U,并且 β 1 , ⋯ , β t \beta_1, \cdots, \beta_t β1,⋯,βt是B的一个基
矩阵的运算
一、意义
已经看到解线性方程组可以化成矩阵的运算,因此在这一章详细讨论矩阵的运算,帮助解线性方程组.
起始矩阵的运算这一章一般人学过之后印象都比较深刻,所以感觉比较简单复习的时候扫描一下即可.
二、基础运算
1.运算:数乘,加法,乘法
运算律:
(1)结合律:(AB)C = A(BC)
(2)分配律:A(B + C) = AB + AC
(3)转置的关系:(A + B)’ = A’ + B’,(AB)’ = B’A’
2.矩阵的秩:rank(AB) ≤ \leq ≤min{rank(A), rank(B)}
3.过渡矩阵:线性空间V的两组基为 α ⃗ 1 , ⋯ , α ⃗ n \vec{\alpha}_1, \cdots, \vec{\alpha}_n α1,⋯,αn和 β ⃗ 1 , ⋯ , β ⃗ n \vec{\beta}_1, \cdots, \vec{\beta}_n β1,⋯,βn向量在第一组基下表示的坐标为 x ⃗ \vec{x} x在第二组基下的坐标为 y ⃗ \vec{y} y.根据之前的定义 β ⃗ j \vec{\beta}_j βj第一组基下的坐标为过度矩阵P的第j列,那么
( β ⃗ 1 , ⋯ , β ⃗ n ) = ( α ⃗ 1 , ⋯ , α ⃗ n ) P x ⃗ = P y ⃗ (\vec{\beta}_1, \cdots, \vec{\beta}_n) = (\vec{\alpha}_1, \cdots, \vec{\alpha}_n)P \\ \vec{x} = P\vec{y} (β1,⋯,βn)=(α1,⋯,αn)Px=Py
三、矩阵的逆和特殊矩阵(在方阵的条件下)
1.初等矩阵:单位矩阵经过一次初等行变换得到的矩阵称为初等矩阵
定理:初等矩阵左乘矩阵A,相当于对A做同样的初等行变换
基础矩阵:形如下面的矩阵
( 1 0 ⋯ 0 0 0 ⋯ 0 ⋮ ⋮ ⋮ 0 0 ⋯ 0 ) ( 0 1 ⋯ 0 0 0 ⋯ 0 ⋮ ⋮ ⋮ 0 0 ⋯ 0 ) ⋯ ( 0 0 ⋯ 0 0 0 ⋯ 0 ⋮ ⋮ ⋮ 0 0 ⋯ 1 ) \begin{pmatrix} 1& 0& \cdots& 0\\ 0& 0& \cdots& 0\\ \vdots& \vdots& \quad& \vdots\\ 0& 0& \cdots& 0 \end{pmatrix} \begin{pmatrix} 0& 1& \cdots& 0\\ 0& 0& \cdots& 0\\ \vdots& \vdots& \quad& \vdots\\ 0& 0& \cdots& 0 \end{pmatrix} \cdots \begin{pmatrix} 0& 0& \cdots& 0\\ 0& 0& \cdots& 0\\ \vdots& \vdots& \quad& \vdots\\ 0& 0& \cdots& 1 \end{pmatrix} ⎝⎜⎜⎜⎛10⋮000⋮0⋯⋯⋯00⋮0⎠⎟⎟⎟⎞⎝⎜⎜⎜⎛00⋮010⋮0⋯⋯⋯00⋮0⎠⎟⎟⎟⎞⋯⎝⎜⎜⎜⎛00⋮000⋮0⋯⋯⋯00⋮1⎠⎟⎟⎟⎞
注:所有的n阶方阵组成的集合看作线性空间,基础矩阵是这个线性空间的一组基
2.可逆矩阵:A为n阶方阵,若存在B,使得AB = BA = I,则称A可逆,记B为 A − 1 A^{-1} A−1
可逆的充要条件:
(1) ∣ A ∣ ≠ 0 |A| \neq 0 ∣A∣=0,且能得出 A − 1 = 1 ∣ A ∣ A ∗ A^{-1} = \frac{1}{|A|} A^* A−1=∣A∣1A∗其中 A ∗ A^* A∗为伴随矩阵
(2)A是满秩矩阵
(3)A的列向量(或者行向量)线性无关
(4)A的列向量为空间 K n K^n Kn的基
(5)A可以表示成初等矩阵的乘积
运算率:(1)A,B可逆,则AB可逆(2) ( A ′ ) − 1 = ( A − 1 ) ′ (A')^{-1} = (A^{-1})' (A′)−1=(A−1)′
定理:可逆矩阵左乘A,不改变A的秩
3.逆的计算方法:
(1)如果BA = I,则A,B都可逆,互为彼此的逆
(2)将B用初等矩阵的乘积表示 P t ⋯ P 2 P 1 A = I P_t\cdots P_2P_1A = I Pt⋯P2P1A=I
(3) A = P 1 − 1 P 2 − 1 ⋯ P n − 1 I A = P_1^{-1}P_2^{-1}\cdots P_n^{-1} I A=P1−1P2−1⋯Pn−1I
(4)可知矩阵(A I)经过初等行变换得到矩阵 ( I A − 1 ) (I \quad A^{-1}) (IA−1)
4.莫拉克法则(这个翻译好像有点奇怪):A是数域K上的n级矩阵,当 ∣ A ∣ ≠ 0 |A| \neq 0 ∣A∣=0时,n元线性方程组 A x ⃗ = β ⃗ A\vec{x} = \vec{\beta} Ax=β的唯一解为
( ∣ B 1 ∣ ∣ A ∣ , ∣ B 2 ∣ ∣ A ∣ , ⋯ , ∣ B n ∣ ∣ A ∣ ) ′ (\frac{|B_1|}{|A|}, \frac{|B_2|}{|A|}, \cdots, \frac{|B_n|}{|A|})' (∣A∣∣B1∣,∣A∣∣B2∣,⋯,∣A∣∣Bn∣)′
其中 B j B_j Bj是把A的第j行换成 β ⃗ \vec{\beta} β形成的
思路:由矩阵方程 A x ⃗ = B ⇒ x ⃗ = A − 1 B A\vec{x} = B \Rightarrow \vec{x} = A^{-1}B Ax=B⇒x=A−1B得到
5.幂等矩阵:如果 A 2 = A A^2 = A A2=A则A是幂等矩阵
6.矩阵正交: A 1 A 2 = A 2 A 1 = 0 A_1A_2 = A_2A_1 = 0 A1A2=A2A1=0则两矩阵正交
定理:n阶方阵 A 1 , ⋯ , A s A_1, \cdots, A_s A1,⋯,As正交充要条件为 r a n k ( A ) = r a n k ( A 1 ) + ⋯ r a n k ( A s ) , A = A 1 + ⋯ A s rank(A) = rank(A_1) + \cdots rank(A_s), A = A_1 + \cdots A_s rank(A)=rank(A1)+⋯rank(As),A=A1+⋯As
7.对角矩阵:除主对角线以外的元素全为0
性质:用对角矩阵左乘A,相当于用对角矩阵的对角上的元素称A的行
8.对称矩阵:若A = A’则A为对称矩阵
性质:若A,B为对称矩阵,则AB为对称矩阵的充要条件为AB = BA
四、其他的运算性质
注:这些内容与之后的学习关系不大,在此不详细列出;以后用到了再更新
1.乘积与行列式:|AB| = |A||B|
2.矩阵的分块
3.矩阵相抵
4.矩阵广义逆
线性映射
一、意义
对线性空间进一步研究.对向量的线性映射可以理解为矩阵乘以向量,最终化成线性方程组的形式,因此线性映射核与像表示方程的解空间.进一步由线性映射的特征值引出矩阵的特征值,矩阵对角化的条件.
到这里已经有足够的知识学习机器学习中的奇异分解,估计应该也在数值分析和最优化理论中使用.
二、线性映射基本概念
1. 定义线性映射A:设V,V’是F上的线性空间,V到V’的映射A如果保持加法和数乘运算,则A是线性映射
A ( α ⃗ + β ⃗ ) = A ( α ⃗ ) + A ( β ⃗ ) A ( k α ⃗ ) = k A ( α ⃗ ) A(\vec{\alpha} + \vec{\beta}) = A(\vec{\alpha}) + A(\vec{\beta})\\ A(k\vec{\alpha}) = kA(\vec{\alpha}) A(α+β)=A(α)+A(β)A(kα)=kA(α)
概念:线性变换,数乘变换,零变换,恒等变换,零映射(映射是A到A’,变换是A到A)
性质:V的一个基 α ⃗ 1 , ⋯ , α ⃗ n \vec{\alpha}_1, \cdots, \vec{\alpha}_n α1,⋯,αn,则对于V中 α ⃗ = a 1 α ⃗ + ⋯ , a n α ⃗ n \vec{\alpha} = a_1\vec{\alpha} + \cdots, a_n\vec\alpha_n α=a1α+⋯,anαn,有: A ( α ⃗ ) = a 1 A ( α ⃗ 1 ) + ⋯ + a n A ( α ⃗ n ) A(\vec{\alpha}) = a_1A(\vec{\alpha}_1) + \cdots + a_nA(\vec{\alpha}_n) A(α)=a1A(α1)+⋯+anA(αn),注:只要知道了V的一个基,V中每一个向量在A下的像就确定了
构造单射:V中取一个基 α ⃗ 1 , ⋯ , α ⃗ n \vec{\alpha}_1, \cdots, \vec{\alpha}_n α1,⋯,αn,V’中任取n个向量 γ ⃗ 1 , ⋯ , γ ⃗ n \vec{\gamma}_1, \cdots, \vec{\gamma}_n γ1,⋯,γn,构造映射A
A : V → V ′ α ⃗ = ∑ i = 1 n a i α ⃗ i → ∑ i = 1 n a i γ ⃗ i A: V \rightarrow V'\\ \vec{\alpha} = \sum^n_{i = 1}a_i\vec\alpha_i \rightarrow \sum^n_{i = 1}a_i\vec\gamma_i A:V→V′α=i=1∑naiαi→i=1∑naiγi
2. 定义Hom(V, V’):V到V’的所有线性映射
性质:Hom(V, V’)是域F上的线性空间,定义了线性映射的加法和数乘
3. 线性映射的运算
定义Hom(V, V’):V到V’的所有线性映射,根据下面定义的加法和数乘,Hom(V, V)是线性空间
定义加法,数乘,乘法(满足结合律,分配律):
( A + B ) α ⃗ = A α ⃗ + B α ⃗ ( k A ) α ⃗ = k ( A α ⃗ ) (A + B)\vec\alpha = A\vec\alpha + B\vec\alpha\\ (kA)\vec\alpha = k(A\vec\alpha) (A+B)α=Aα+Bα(kA)α=k(Aα)
4. 定义F上的代数:线性空间A有加法,乘法,数乘且A对于加法和乘法称为单位元的环,A的乘法和数乘满足: k ( α ⃗ β ⃗ ) = ( k α ⃗ ) β ⃗ = α ⃗ ( k β ⃗ ) k(\vec\alpha\vec\beta) = (k\vec\alpha)\vec\beta = \vec\alpha(k\vec\beta) k(αβ)=(kα)β=α(kβ),则称A是F域上的一个代数,线性空间A的维数 = 代数A的维数
定义 M n ( F ) M_n(F) Mn(F):域F上所有的n阶矩阵(显然 M n ( F ) M_n(F) Mn(F)维数是 n 2 n^2 n2)
5. 定义线性变换多项式集F(A)
(1)有了线性变换的乘法,可以定义线性变换的幂
(2)定义线性变换的多项式 f ( A ) f(A) f(A)
(3)所有多项式组成集合F(A),为线性空间
6. 定义投影:设V是域F上的线性空间,若 V = U ⊕ W , α ⃗ ∈ V V = U \oplus W, \, \vec\alpha \in V V=U⊕W,α∈V设
α ⃗ = α ⃗ 1 + α ⃗ 2 , α ⃗ 1 ∈ U , α ⃗ 2 ∈ W P U α ⃗ = α ⃗ 1 \vec\alpha = \vec\alpha_1 + \vec{\alpha}_2, \vec{\alpha}_1 \in U, \vec{\alpha}_2 \in W\\ P_U{\vec{\alpha}} = \vec{\alpha}_1 α=α1+α2,α1∈U,α2∈WPUα=α1
称 P U P_U PU是平行于W在U上的投影,图形解释如下

性质:
(1) P U P_U PU是V上的线性变换
(2) P U = { α ⃗ , α ⃗ ∈ U 0 , α ⃗ ∈ W P_U = \begin{cases} \vec{\alpha}, \quad \vec{\alpha} \in U\\ 0, \quad \vec{\alpha} \in W \end{cases} PU={α,α∈U0,α∈W
(3) P U 2 = P U P_U^2 = P_U PU2=PU
7. 特殊的变换
幂等变换: A 2 = A A^2 = A A2=A
正交:AB是零变换,则A,B正交
对合变换: A 2 = I A^2 = I A2=I(I为恒等变换)
二、线性映射的核与像
1. 定义核,像:A是V到V’的映射,V的子集 { α ⃗ ∈ V ∣ A α ⃗ = 0 ⃗ } \{\vec\alpha \in V | A \vec{\alpha} = \vec0\} {α∈V∣Aα=0}是A的核,记作KerA;A的值域是A的像,记作ImA
2. 性质
(1)A是单射充要条件:KerA = 0
(2)A是满射充要条件:ImA = V’
(3)对于平行于W的投影 P U P_U PU: K e r P U = W , I m P U = U KerP_U = W, ImP_U = U KerPU=W,ImPU=U
(4)同构映射: V / K e r A ≅ I m A V / KerA \cong ImA V/KerA≅ImA
(5)有限维条件下: d i m ( K e r A ) + d i m ( I m A ) = d i m V dim(KerA) + dim(ImA) = dimV dim(KerA)+dim(ImA)=dimV
3. 定义维度,秩:dim(A的核) 称为A的零度,rank(A) = dim(A的像)
4. 定理:A是V上的线性变换,A是单射当且仅当A是满射
5. 线性方程组与线性映射
设线性方程组为 A x ⃗ = 0 , A = ( α ⃗ 1 , ⋯ , α ⃗ n ) A \vec{x} = 0, A = (\vec{\alpha}_1, \cdots, \vec{\alpha}_n) Ax=0,A=(α1,⋯,αn),A是 s × n s \times n s×n矩阵
令线性映射
A : F n → F s α ⃗ → A α ⃗ {\mathscr A} :F^n \rightarrow F^s\\ \qquad \vec{\alpha} \rightarrow A\vec{\alpha} A:Fn→Fsα→Aα
则解空间 W = K e r A W = Ker \mathscr A W=KerA
A的列向量空间 < α ⃗ 1 , ⋯ , α ⃗ n > = I m A <\vec{\alpha}_1, \cdots, \vec{\alpha}_n> = Im \mathscr A <α1,⋯,αn>=ImA
得到 r a n k ( A ) = r a n k ( A ) rank(A) = rank(\mathscr A) rank(A)=rank(A)
注:此处将线性映射写成 A \mathscr A A形式,以区分矩阵
6. 定理:如果线性变换A, K e r A ∩ I m A = 0 Ker A \cap ImA = 0 KerA∩ImA=0,则 V = K e r A ⊕ I m A V = KerA \oplus ImA V=KerA⊕ImA
定理:如果A是幂等变换,则 V = K e r A ⊕ I m A V = KerA \oplus ImA V=KerA⊕ImA
定理:A是幂等变换,则 V = I m A ⊕ I m ( I − A ) V = ImA \oplus Im(I - A) V=ImA⊕Im(I−A)
定理:线性变换A,A是幂等变换当且仅当 r a n k ( A ) + r a n k ( I − A ) = n rank(A) + rank(I - A) = n rank(A)+rank(I−A)=n
三、线性映射与矩阵
1. 线性变换对应的矩阵:
(1)选定线性空间上的基 α ⃗ 1 , ⋯ , α ⃗ n \vec{\alpha}_1, \cdots, \vec{\alpha}_n α1,⋯,αn
(2)线性映射 A \mathscr A A表示成以下形式
{ A α ⃗ 1 = a 11 α ⃗ 1 + ⋯ + a n 1 α ⃗ n A α ⃗ 2 = a 12 α ⃗ 1 + ⋯ + a n 2 α ⃗ n ⋮ A α ⃗ n = a 1 n α ⃗ 1 + ⋯ + a n n α ⃗ n \begin{cases} {\mathscr A} \it \vec{\alpha}_1 = a_{11} \vec{\alpha}_1 + \cdots + a_{n1}\vec{\alpha}_n \\ \mathscr A \it \vec{\alpha}_2 = a_{12} \vec{\alpha}_1 + \cdots + a_{n2}\vec{\alpha}_n\\ \vdots \\ \mathscr A \it \vec{\alpha}_n = a_{1n}\vec{\alpha}_1 + \cdots + a_{nn}\vec{\alpha}_n \end{cases} ⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧Aα1=a11α1+⋯+an1αnAα2=a12α1+⋯+an2αn⋮Aαn=a1nα1+⋯+annαn
(3)则A为,线性变换在基 α ⃗ 1 , ⋯ , α ⃗ n \vec{\alpha}_1, \cdots, \vec{\alpha}_n α1,⋯,αn下的矩阵
A = ( a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋮ ⋮ ⋮ a n 1 a n 2 ⋯ a n n ) A = \begin{pmatrix} a_{11}& a_{12}& \cdots& a_{1n}\\ a_{21}& a_{22}& \cdots& a_{2n}\\ \vdots& \vdots& \quad& \vdots&\\ a_{n1}& a_{n2}& \cdots& a_{nn} \end{pmatrix} A=⎝⎜⎜⎜⎛a11a21⋮an1a12a22⋮an2⋯⋯⋯a1n