YOLOv8的改进
1.YOLO的一些发展历史
YOLOv1:2015年Joseph Redmon和 Ali Farhadi等 人(华盛顿大学)
YOLOv2:2016年Joseph Redmon*和**Ali Farhadi*等人*(华盛顿大学)*
YOLOv3:2018年Joseph Redmon*和**Ali Farhadi*等人*(华盛顿大学)*
YOLOv4:2020年Alexey Bochkovskiy和Chien-Yao Wang等人
YOLOv5:2020年Ultralytics公司
YOLOv6:2022年美团公司
YOLOv7**:2022年Alexey Bochkovskiy*和Chien-Yao Wang*等人
YOLOv8:2023年Ultralytics公司
上述简单罗列了 YOLOv数字系列 的发布时间和作者/单位机构,因为YOLO系列生态太猛了,比如还有知名的PP-YOLO系列、YOLOX等等工作。
2. YOLOv8的相关资源
YOLOv8 Github: https://github.com/ultralytics/ultralytics
YOLOv8的权重:https://github.com/ultralytics/assets/releases
YOLOv8文档: https://v8docs.ultralytics.com/
YOLOv8 Python package源码库:https://test.pypi.org/simple/ultralytics/
3.YOLOv5 Vs YOLOv8
YOLOv5

Backbone:CSPDarkNet结构,主要结构思想的体现在C3模块,这里也是梯度分流的主要思想所在的地方;
PAN-FPN:双流的FPN,必须香,也必须快,但是量化还是有些需要图优化才可以达到最优的性能,比如cat前后的scale优化等等,这里除了上采样、CBS卷积模块,最为主要的还有C3模块(记住这个C3模块哦);
Head:Coupled Head+Anchor-base,毫无疑问,YOLOv3、YOLOv4、YOLOv5、YOLOv7都是Anchor-Base的,后面会变吗?
Loss:分类用BEC Loss,回归用CIoU Loss。
YOLOv8

具体改进如下:
Backbone:使用的依旧是CSP的思想,不过YOLOv5中的C3模块被替换成了C2f模块,实现了进一步的轻量化,同时YOLOv8依旧使用了YOLOv5等架构中使用的SPPF模块;
PAN-FPN:毫无疑问YOLOv8依旧使用了PAN的思想,不过通过对比YOLOv5与YOLOv8的结构图可以看到,YOLOv8将YOLOv5中PAN-FPN上采样阶段中的卷积结构删除了,同时也将C3模块替换为了C2f模块;
Decoupled-Head:是不是嗅到了不一样的味道?是的,YOLOv8走向了Decoupled-Head;
Anchor-Free:YOLOv8抛弃了以往的Anchor-Base,使用了Anchor-Free的思想;
损失函数:YOLOv8使用VFL Loss作为分类损失,使用DFL Loss+CIOU Loss作为分类损失;
样本匹配:YOLOv8抛弃了以往的IOU匹配或者单边比例的分配方式,而是使用了Task-Aligned Assigner匹配方式。
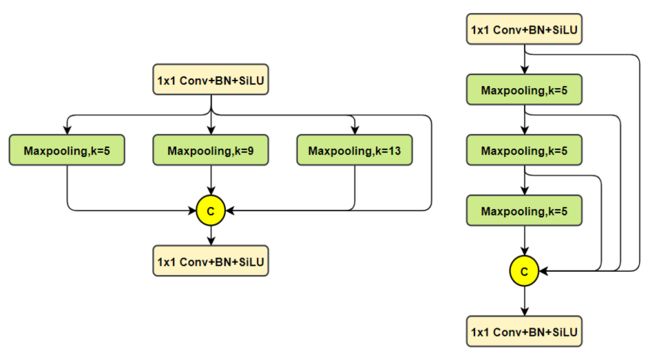
SPP Vs SPPF:


C3 Vs C2f:

针对C3模块,其主要是借助CSPNet提取分流的思想,同时结合残差结构的思想,设计了所谓的C3 Block,这里的CSP主分支梯度模块为BottleNeck模块,也就是所谓的残差模块。同时堆叠的个数由参数n来进行控制,也就是说不同规模的模型,n的值是有变化的。
其实这里的梯度流主分支,可以是任何之前你学习过的模块,比如,美团提出的YOLOv6中就是用来重参模块RepVGGBlock来替换BottleNeck Block来作为主要的梯度流分支,而百度提出的PP-YOLOE则是使用了RepResNet-Block来替换BottleNeck Block来作为主要的梯度流分支。而YOLOv7则是使用了ELAN Block来替换BottleNeck Block来作为主要的梯度流分支。
C3模块的Pytorch的实现如下:
class C3(nn.Module):
# CSP Bottleneck with 3 convolutions
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
def forward(self, x):
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))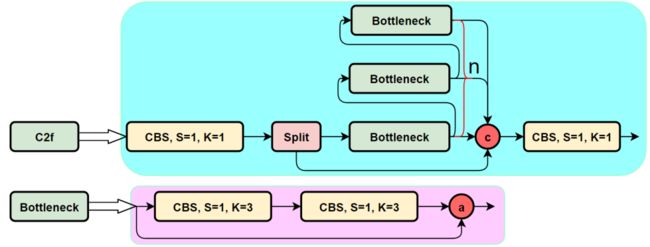
C2f模块就是参考了C3模块以及ELAN的思想进行的设计,让YOLOv8可以在保证轻量化的同时获得更加丰富的梯度流信息。

C2f模块对应的Pytorch实现如下:
class C2f(nn.Module):
# CSP Bottleneck with 2 convolutions
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
self.c = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)
self.m = nn.ModuleList(Bottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))
def forward(self, x):
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))PAN-FPN改进了什么?
YOLOv5的Neck部分的结构图如下:

YOLOv6的Neck部分的结构图如下:

YOLOv8的结构图:
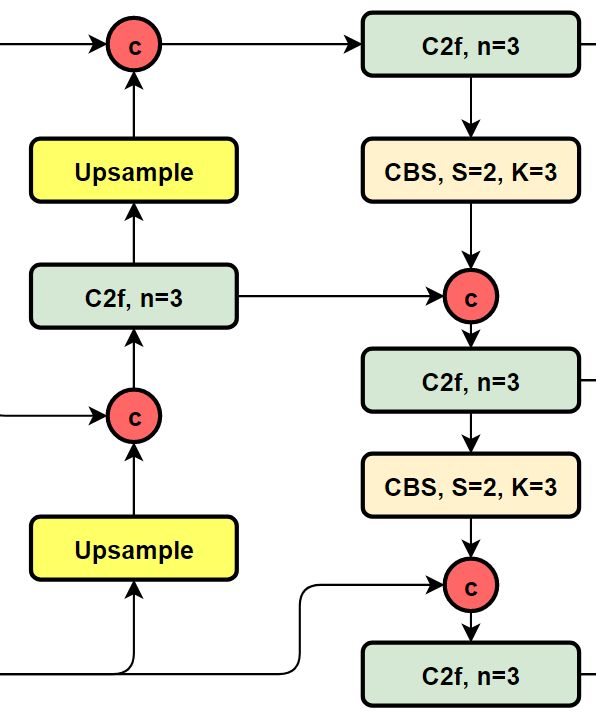
可以看到,相对于YOLOv5或者YOLOv6,YOLOv8将C3模块以及RepBlock替换为了C2f,同时细心可以发现,相对于YOLOv5和YOLOv6,YOLOv8选择将上采样之前的1×1卷积去除了,将Backbone不同阶段输出的特征直接送入了上采样操作。
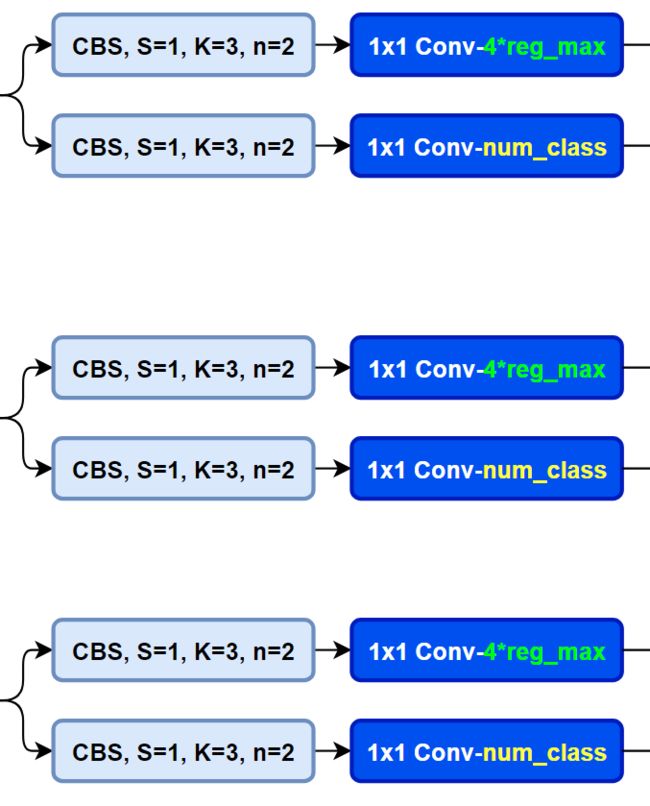
Head部分都变了什么呢?
先看一下YOLOv5本身的Head(Coupled-Head):
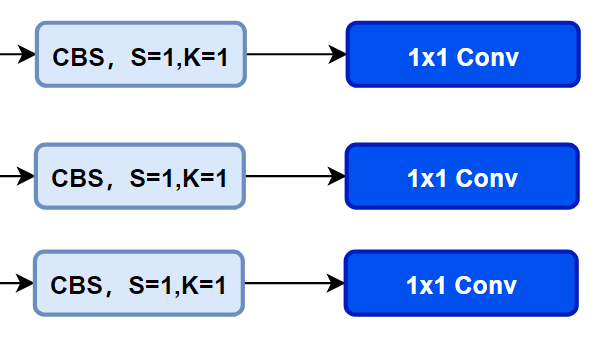
而YOLOv8则是使用了Decoupled-Head,回归头的通道数也变成了4*reg_max的形式:
损失函数
对于YOLOv8,其分类损失为VFL Loss,其回归损失为CIOU Loss+DFL的形式,这里Reg_max默认为16。
VFL主要改进是提出了非对称的加权操作,FL和QFL都是对称的。而非对称加权的思想来源于论文PISA,该论文指出首先正负样本有不平衡问题,即使在正样本中也存在不等权问题,因为mAP的计算是主正样本。

q是label,正样本时候q为bbox和gt的IoU,负样本时候q=0,当为正样本时候其实没有采用FL,而是普通的BCE,只不过多了一个自适应IoU加权,用于突出主样本。而为负样本时候就是标准的FL了。可以明显发现VFL比QFL更加简单,主要特点是正负样本非对称加权、突出正样本为主样本。
针对这里的DFL(Distribution Focal Loss),其主要是将框的位置建模成一个 general distribution,让网络快速的聚焦于和目标位置距离近的位置的分布。
正负样本的匹配
标签分配是目标检测非常重要的一环,在YOLOv5的早期版本中使用了MaxIOU作为标签分配方法。然而,在实践中发现直接使用边长比也可以达到一样的效果。而YOLOv8则是抛弃了Anchor-Base方法使用Anchor-Free方法,找到了一个替代边长比例的匹配方法: TaskAligned。为与NMS搭配,训练样例的Anchor分配需要满足以下两个规则:
正常对齐的Anchor应当可以预测高分类得分,同时具有精确定位;
不对齐的Anchor应当具有低分类得分,并在NMS阶段被抑制。
基于上述两个目标,TaskAligned设计了一个新的Anchor alignment metric 来在Anchor level 衡量Task-Alignment的水平。并且,Alignment metric 被集成在了 sample 分配和 loss function里来动态的优化每个 Anchor 的预测。
Anchor alignment metric:
分类得分和 IoU表示了这两个任务的预测效果,所以,TaskAligned使用分类得分和IoU的高阶组合来衡量Task-Alignment的程度。使用下列的方式来对每个实例计算Anchor-level 的对齐程度: $$ t=s^{\alpha}+\mu^{\beta} $$ s 和 u 分别为分类得分和 IoU 值,α 和 β 为权重超参。从上边的公式可以看出来,t 可以同时控制分类得分和IoU 的优化来实现 Task-Alignment,可以引导网络动态的关注于高质量的Anchor。
Training sample Assignment:
采用一种简单的分配规则选择训练样本:对每个实例,选择m个具有最大t值的Anchor作为正样本,选择其余的Anchor作为负样本。然后,通过损失函数(针对分类与定位的对齐而设计的损失函数)进行训练。
4.YOLOv8环境安装
我们使用的是ultralytics(8.0.0) python package,其安装方式如下:
#pip install -i https://test.pypi.org/simple/ --extra-index-url https://pypi.org/simple/ ultralytics==0.0.59
#pip install -e ultralytics
pip install ultralytics你可以在/usr/local/lib/pythonx.x/dist-packages/ultralytics 下找到安装装宝的YOLOv8的源文件,进行魔改!
5.构建自己的训练集
YOLOv8可以进行分类,检测和分割类任务的学习,我们以检测类任务为例,并训练YOLOv8s,其数据集的准备完全和YOLOv5,YOLOv6,YOLOv7的一致,可以参考我们之前的项目
https://github.com/DataXujing/YOLO-v5
https://github.com/DataXujing/YOLOv6
https://github.com/DataXujing/YOLOv7
6.构建自己训练集的配置文件和模型配置文件
模型配置文件:
#yolov8s.yaml
# Parameters
nc: 4 # number of classes
depth_multiple: 0.33 # scales module repeats
width_multiple: 0.50 # scales convolution channels
# YOLOv8.0s backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0s head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 13
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 17 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 20 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 23 (P5/32-large)
- [[15, 18, 21], 1, Detect, [nc]] # Detect(P3, P4, P5)
数据集配置文件
#score_data.yaml
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
train: ./dataset/score/images/train # train images
val: ./dataset/score/images/val # val images
#test: ./dataset/score/images/test # test images (optional)
# Classes
names:
0: person
1: cat
2: dog
3: horse训练超参数配置文件
我们对训练的超参数进行了简单的修改,通过命令行参数传入,也可以通过配置文件进行配置。
task: "detect" # choices=['detect', 'segment', 'classify', 'init'] # init is a special case. Specify task to run.
mode: "train" # choices=['train', 'val', 'predict'] # mode to run task in.
# Train settings -------------------------------------------------------------------------------------------------------
model: null # i.e. yolov8n.pt, yolov8n.yaml. Path to model file
data: null # i.e. coco128.yaml. Path to data file
epochs: 100 # number of epochs to train for
patience: 50 # TODO: epochs to wait for no observable improvement for early stopping of training
batch: 16 # number of images per batch
imgsz: 640 # size of input images
save: True # save checkpoints
cache: False # True/ram, disk or False. Use cache for data loading
device: '' # cuda device, i.e. 0 or 0,1,2,3 or cpu. Device to run on
workers: 8 # number of worker threads for data loading
project: null # project name
name: null # experiment name
exist_ok: False # whether to overwrite existing experiment
pretrained: False # whether to use a pretrained model
optimizer: 'SGD' # optimizer to use, choices=['SGD', 'Adam', 'AdamW', 'RMSProp']
...7.YOLOv8目标检测任务训练
yolo task=detect mode=train model=yolov8s.yaml data=score_data.yaml epochs=100 batch=64 imgsz=640 pretrained=False optimizer=SGD 
8.YOLOv8推断Demo
# 自己实现的推断程序
python3 inference.py

|
|
|

|
9.YOLOv8端到端模TensorRT模型加速
pth模型转onnx
#CLI
yolo task=detect mode=export model=./runs/detect/train/weights/last.pt format=onnx simplify=True opset=13
# python
from ultralytics import YOLO
model = YOLO("./runs/detect/train/weights/last.pt ") # load a pretrained YOLOv8n model
model.export(format="onnx") # export the model to ONNX format增加NMS Plugin
执行tensorrt/下的如下代码,添加NMS到YOLOv8模型
添加后处理
python3 yolov8_add_postprocess.py添加NMS plugin
python3 yolov8_add_nms.py生成last_1_nms.onnx,打开该文件对比和原onnx文件的区别,发现增加了如下节点(完成了将NMS添加到onnx的目的):

onnx转trt engine
trtexec --onnx=last_1_nms.onnx --saveEngine=yolov8s.plan --workspace=3000 --verbose
出现上述界面,onnx正常序列化为TRT engine.
TRT C++推断
在win 10下基于RTX 1060 TensorRT 8.2.1进行测试,我们的开发环境是VS2017,所有C++代码已经存放在tensorrt/文件夹下。其推断结果如下图所示(可以发现我们实现了YOLOv8的TensorRT端到端的推断,其推断结果与原训练框架保持一致):

|

|

|

|