ROS教程之安装配置
一、安装配置
安装indigo,推荐这个稳定版本,新出的kinetic资料少,且不稳定。而且indigo的资料特别多,国外已经有很多书了,像ros by example这些。国内也有很多博客是关于这个的。
安装配置indigo教程,直接看wiki就可以
http://wiki.ros.org/indigo/Installation/Ubuntu
注意:
1、安装之前,一定要在系统设置里设置你的软件和更新。系统设置--->软件和更新--->设置成如下界面

2、选择镜像这个无所谓,可以用它默认的,我安装时用的时默认的,就是有点慢,但是还是可以的。也可以选择国内的镜像。具体点击网页上那个黄色的Mirrors查看。
3、推荐安装 Desktop-Full
二、创建包
官方教程:
http://wiki.ros.org/cn/ROS/Tutorials/CreatingPackage
1.创建一个工作空间 (一定记得用source修改环境变量)
http://wiki.ros.org/catkin/Tutorials/create_a_workspace
2.创建catkin程序包
根据下面的第三步来完成
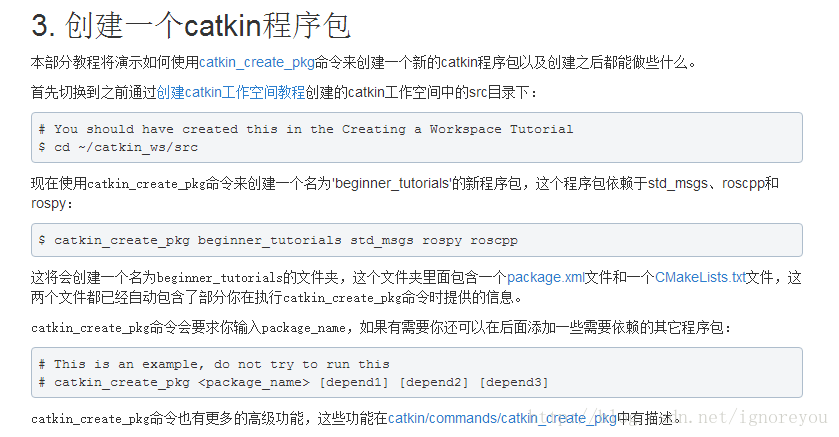
http://wiki.ros.org/cn/ROS/Tutorials/CreatingPackage
创建之后 用tree beginner_tutorials查看关系

注意:路径一定得在catkin_ws/src下tree,否则将会出错。
3.在/beginner_tutorials/src目录下创建hello.cpp源代码文件,并编辑输入如下代码
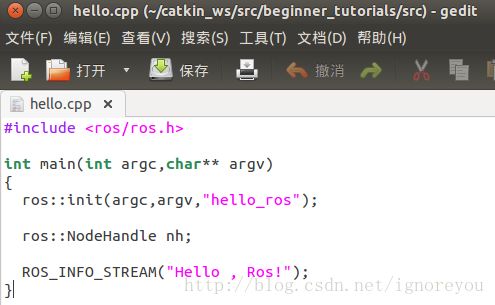
注意:hello.cpp的路径 推荐使用gedit
4.修改编译makefile文件CmakeLists.txt
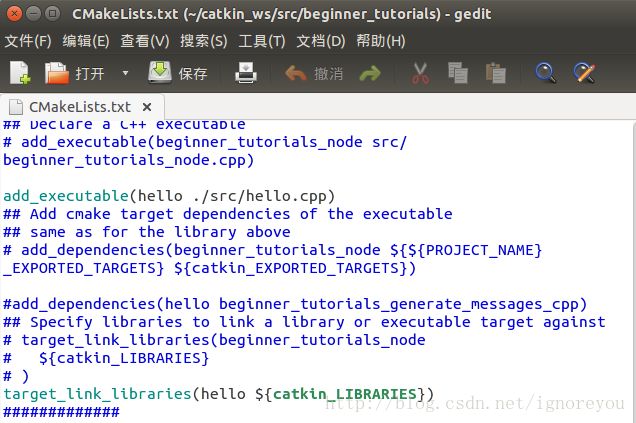
注意路径!!!
主要的文件:
cmake_minimum_required(VERSION2.8.3)
project(beginner_tutorials)
find_package(catkin REQUIREDCOMPONENTS roscpp rospy std_msgs)
include_directories(${catkin_INCLUDE_DIRS})
add_executable(hello./src/hello.cpp)
target_link_libraries(hello${catkin_LIBRARIES})
要添加的就这两句:
add_executable(hello./src/hello.cpp)
target_link_libraries(hello${catkin_LIBRARIES})
5.回到工作空间catkin_ws下,编译包使用catkin_make

注:因我已经编译过,所以有点不一样
6.source一下之后就可以运行了

注意:一定要source,否则会报错:没有发现包