多视图聚类(+incomplete multi view cluster)
1.A study of graph-based system for multi-view clustering


2.Consistency Meets Inconsistency: A Unified Graph Learning Framework for Multi-view Clustering
该方法首次将多视图一致性和多视图不一致性在同一的优化模型中明确地表述出来。设计了一种新的交替优化方案,迭代学习每个视图图地一致部分和不一致部分,以及融合所有视图一致部分的统一图。此方案既适用于相似图也适用于不同图,从而产生了两种基于图融合的变体,暨距离(不同)图融合和相似图融合。代码:https://github.com/youweiliang/ConsistentGraphLearning https://github.com/youweiliang/ConsistentGraphLearning
https://github.com/youweiliang/ConsistentGraphLearning

3.Consensus guided incomplete multi-view spectral clustering
CGIMVSC视图寻找每个单一视图的局部信息和所有视图共享的语义一致性信息,局部结构从不完整数据中自适应获得而不是通过k近邻预先定义,引入一个共正则化约束去最小化公共表示和单个视图表示之间的不一致性,使所有视图都能获得一致聚类结果。


4.Multi-View Spectral Clustering With Incomplete Graphs
将谱嵌入过程和相似矩阵补全过程相结合,将公共表示矩阵与对应的特定视图表示矩阵相乘,恢复每个相似矩阵的缺失项,然后根据完整的相似矩阵学习这些表示矩阵。


5.A novel consensus learning approach to incomplete multi-view
通过将索引矩阵集成到矩阵分解中,引入一种低维共识表示,从可用实例的原始特征表示中挖掘互补的多视图信息。此外,通过结合自表示、索引矩阵和共识项,利用共识相似图来探索数据点之间潜在的跨视图关系。关键是通过图拉普拉斯正则化将共识表示与相似图关联。

6. Adaptive Weighted Graph Fusion Incomplete Multi-View Subspace Clustering


7.Incomplete Multi-view Clustering

8.Incomplete Multiview Spectral Clustering With Adaptive Graph Learning

9. Incomplete Multi-Modal Visual Data Grouping


10. Low-rank representation with adaptive graph regularization
将距离正则化和非负约束联合集成到LRR框架中,使该方法能够同时利用数据的全局和局部信息进行图学习。其次,在模型中进一步引入一种新的秩约束,使学到的图具有非常清晰的聚类结构。

11.Multi-view subspace clustering with intactness-aware similarity


 12.Multi-View Clustering via Joint Nonnegative Matrix Factorization
12.Multi-View Clustering via Joint Nonnegative Matrix Factorization
通过添加对U的约束可以在V和V*之间达到共识的可比性

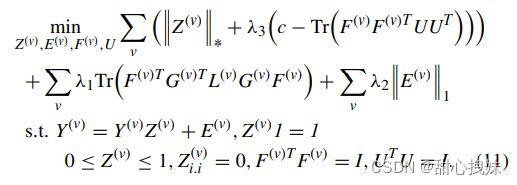
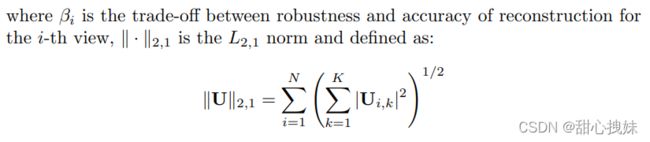
13. Multiple Incomplete Views Clustering via Weighted Nonnegative Matrix Factorization with L2,1 Regularization
基于L2,1范数正则化加权非负矩阵分解的算法,通过学习所有视图的潜在特征矩阵并生成共识矩阵,从而最小化每个视图和共识之间的差异。

14. Multi-View Intact Space Clustering
大多数现有的多视图聚类方法都假设每个单独的视图足以构建集群结构,但是在实际应用中并不能保证这一点。多视图完整空间聚类能够同时从多个不足的视图中恢复潜在的完好空间,并从得到的完备空间构建聚类结构。对于每个视图,设计一个视图生成函数,将潜在的完整空间表示映射到视图表示中。由于给出了视图表示,通过将每个视图表示映射回来,可以恢复潜在的完备空间,在此基础上可以应用基于矩阵分解的聚类方法。

15. One-Pass Incomplete Multi-View Clustering

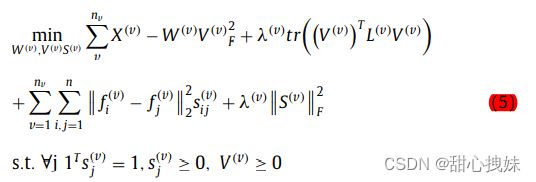
16. SRAGL-AWCL: A two-step multi-view clustering via sparse representation and adaptive weighted cooperative learning
将提出的自适应图学习稀疏表示与自适应加权协作学习相结合。在第一步中,所提出的通过流形正则化的矩阵分解可以增强每个视图样本的稀疏特征聚类判别能力。引入自适应图学习的同步优化方法可以更好地保留其内部各视图的完整结构。通过使用稀疏矩阵和最优图相似矩阵来保证视图的结构相关性;第二部,对每个视图进行自适应加权协同学习,得到全局最优矩阵。为了保证全局矩阵与各个视图相关联,还对全局矩阵进行了图学习。

17.Multi-view graph embedding clustering network: Joint self-supervision and block diagonal representation

18.Multi-View Subspace Clustering
子空间聚类就是找到数据分布的低维子空间,并对数据点进行正确的聚类。使用一个共同的聚类结构来保证不同视图之间的一致性。
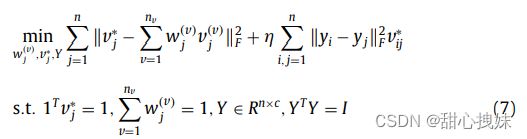
19.Multi-View Clustering in Latent Embedding Space
潜在嵌入空间多视图聚类,该方法能将学到的潜在嵌入空间中的多视图数据聚类,同时在统一的优化框架中学习全局结构和聚类指示矩阵。

20.The Constrained Laplacian Rank Algorithm for Graph-Based Clustering

21. Consensus One-step Multi-view Subspace Clustering
多视图子空间聚类有较强的揭示跨视图隐藏的内在低维聚类结构的能力,但是现有的MVSC方法通过合并噪声亲和矩阵,直接在相似度上融合多视图信息,并分离了亲和学习、多视图信息融合和聚类过程。本文提出COMVSC,共识一步多视图子空间聚类,不是直接融合多个亲和矩阵,COMVSC优化集成判别分区级信息,在统一的框架下同时学习了亲和矩阵、共识表示和最终聚类标签矩阵。


22.Robust Graph Learning From Noisy Data
通过自适应去除原始数据中的噪声和误差,从真实世界的噪声数据中学习可靠的图。可以看作是流形正则化鲁棒主成分分析的一个鲁棒版本。首先利用图平滑性假设提高低秩恢复,再利用RPCA恢复的干净数据改善图的构造。

23. Unified Embedding Alignment with Missing Views Inferring for Incomplete Multi-View Clustering
鲁棒不完全多视图聚类的统一嵌入对齐框架。引入位置保留的重建项来推断缺失的视图,使所有的视图可以自然对齐。通过反向图正则化自适应学习并嵌入共识图,保证多个视图的共同局部结构,进而使不完整视图和推断视图进一步对齐。

24.One-step multi-view subspace clustering with incomplete views
基于低秩矩阵分解的不完整多视图子空间聚类方法。利用低秩矩阵分解学习共识表示矩阵,结合本文提出的非负嵌入和谱嵌入子空间聚类的目标函数,将整个过程建立为同一个目标函数进行联合优化,不需要进行后处理(kmeans),避免了对初值敏感的缺陷。

25. Adaptive partial graph learning and fusion for incomplete multi‐view clustering
最近提出的不完整多视图聚类方法关注于从可用实例中直接学习一个公共表示或者一个共识邻接相似度图,然而却忽略了隐藏在缺失视图中可用的信息。本文提出了一种基于自适应局部图学习与融合的不完整多视图聚类方法,利用每个视图的可用实例来学习相遇的特定视图的部分图,在该部分图中可用很好地保存视图内地局部结构,然后设计了一个跨视图图融合项来学习不同视图地一致完全图,它可以利用从不完整视图学习到的特定视图的部分图中隐藏的互补信息。另外对融合图的图拉普拉斯矩阵施加秩约束。

26. Adaptive Graph Completion Based Incomplete Multi-View Clustering
提出了一种基于不完整多视图聚类的自适应图补全方法,开发了一个图补全和共识表示学习的联合框架,该框架主要包括视图内保存、视图内推断和共识表示学习三部分。为了减少信息不平衡的负面影响,AGC-IMC在共识表示学习中引入了一些自适应权重来平滑不同视图的重要性。


整理了一些我近期看过的文章,主要是多视图聚类,我自己在研究不完整多视图聚类,所以有兴趣的朋友欢迎跟我一起讨论