CSPNet 论文学习
Abstract
神经网络为计算机视觉任务如目标检测,提供了 state of the art 的方法,取得了难以置信的成绩。但是,这些成绩都过于依赖高计算量,使我们无法在廉价的设备上使用这些先进的方法。本文从网络结构的角度出发,提出了跨阶段局部网络(CSPNet),缓解之前的方法对高计算成本的依赖。作者认为,网络优化过程中存在大量重复的梯度信息。CSPNet 尊重梯度的多样性,将网络中各阶段的特征图整合起来。在ImageNet的实验中,与其它方法相比,CSPNet的计算量降低了 20 % 20\% 20%,而准确率保持不变甚至有所提升。在COCO数据集上,CSPNet的 A P 50 AP_{50} AP50要明显高于其它的SOTA方法。CSPNet很容易实现,也很通用,可以与ResNet, ResNeXt, DenseNet 等方法结合使用。代码位于https://github.com/WongKinYiu/CrossStagePartialNetworks。
1. Introduction
一般来说,神经网络越深、越宽的话,性能就越好。但是,这样做会带来计算量的显著增加,对于有些任务(如目标检测)来说就比较昂贵。人们越来越需要计算量较低的模型,因为现实环境中的应用程序通常运行在小型设备上,而且推理时间不能长,这给计算机视觉算法带来了不小的挑战。尽管有一些方法是针对移动端CPU设计的,它们所采用的 depth-wise separable convolution 与工业界在边缘计算上的IC设计(如Application-Specific Integrated Circuit, ASIC)不兼容。本文,作者研究了SOTA方法的算力成本,如ResNet, ResNeXt, DenseNet。作者进一步设计了计算效率比较高的组件,使这些网络可以部署在CPU和移动端GPU上,而不牺牲性能。

本文中,作者提出了跨阶段局部网络(CSPNet)。CSPNet的设计目的就是让网络在降低计算量的前提下,获取更丰富的梯度融合信息。它将基础层的特征图划分为2个部分,然后再通过一个跨阶段层级将这2个部分融合起来。通过分开梯度流,梯度流就可以在不同的网络路径上传播。这样,通过变换 concat 和 transition 操作,作者发现传播后的梯度流会有较大的相关性差异。此外,CSPNet 能够极大地降低计算量,提升推理速度和准确率,如图1所示。基于CSPNet的目标检测器主要解决了下面3个问题:
- 增强CNN的学习能力:轻量化后,现有CNN的准确率会大幅度退化,所以作者希望可以增强CNN的学习能力,这样即便轻量化了,也可以保持住准确性。CSPNet 可以轻松地加在 ResNet, ResNeXt, DenseNet 之中,计算量普遍会降低 10 % 10\% 10%到 20 % 20\% 20%,但准确率都超过了本来的算法。
- 去掉算力较高的计算瓶颈结构:计算瓶颈算力消耗过高,会导致推理时间过长,或者部分运算单元会闲置。因此,作者希望可以将计算量均匀地摊在每一层上,这样就可有效地提升每个计算单元的利用率,降低不必要的资源消耗。CSPNet 将 PeleeNet的计算瓶颈的计算量几乎降低了一半。在MS COCO数据集上,它将基于YOLOv3的模型的计算瓶颈的算力消耗降低了 80 % 80\% 80%。
- 降低内存占用:DRAM的晶元制造成本非常昂贵。如果我们可以有效地降低内存成本,我们就可以极大地减少ASIC的成本。为了降低内存使用率,在特征金字塔生成过程中,作者采用了 cross-channel pooling 来压缩特征图。这样,CSPNet 将 PeleeNet 在特征金字塔生成过程中所消耗的内存降低了 75 % 75\% 75%。
CSPNet 可以提升CNN的学习能力,因此就可以用一个较小的模型取得更高的准确率。在 GTX 1080Ti显卡上,CSPNet 在 COCO A P 50 AP_{50} AP50上取得了 50 % 50\% 50%,速度是109FPS。因此CSPNet 能够有效地降低显存占用,在 Intel i9-9900K 上,该方法实现了 40 % 40\% 40%的 COCO A P 50 AP_{50} AP50,速度是 52FPS。此外,CSPNet 能够极大地降低计算瓶颈,Exact Fusion Model 能够有效地降低所需的内存消耗,在NVIDIA Jetson TX2上,该方法取得了 42 % 42\% 42%的 COCO A P 50 AP_{50} AP50,速度是49FPS。
2. Related Works
CNN 结构设计。在ResNeXt中,作者首次提出了 cardinality 比深度和宽度维度更有效。DenseNet 能够显著地降低参数量和计算量,因为采用了大量的复用特征。它将之前所有层的输出特征 concatenate 起来,作为下一层的输入,最大化 cardinality。SparseNet 将 dense 连接调整为指数分布的连接,有效地提高参数利用率,因此效果更好。Wang 等人根据梯度信息结合的想法,进一步解释了高 cardinality 和稀疏连接能够提升网络的学习能力,提出了 partial ResNet(PRN)。为了提升CNN推理的速度,Ma等人在设计 ShuffleNet-V2时提出了4个指导意见。Chao等人提出了低内存占用的CNN,Harmonic DenseNet(HarDNet),以及一个尺度卷积输入/输出,是对DRAM占用与实际DRAM占用比例的近似。
实时目标检测器:最著名的两个实时目标检测器就是 YOLOv3和SSD。基于SSD,LRF和RFBNet 在GPU上取得了 state of the art 的实时目标检测性能。最近,anchor-free 目标检测器又逐渐吃香起来,CenterNet 和 CornerNet-Lite 便属于这类检测器,在效率和性能上都不错。对于CPU或移动端GPU上的实时目标检测,基于SSD的 Pelee,基于YOLOv3的PRN,Light-head RCNN 的 ThunderNet都取得了极佳的表现。
3. Method
3.1 Cross Stage Partial Network
DenseNet:图2 展示了单阶段 DenseNet 的具体结构。每个阶段都包含一个 dense 模块和一个 transition 层,每个 dense 模块由 k k k个 dense 层构成。第 i i i个dense层的输出会与第 i i i个dense层的输入 concat 起来,作为第 i + 1 i+1 i+1个 dense 层的输入。下面等式就是对上述机制的表示:
x 1 = w 1 ∗ x 0 x_1 = w_1 \ast x_0 x1=w1∗x0
x 2 = w 2 ∗ [ x 0 , x 1 ] x_2 = w_2 \ast [x_0, x_1] x2=w2∗[x0,x1]
. . . ... ...
x k = w k ∗ [ x 0 , x 1 , . . . , x k − 1 ] x_k = w_k \ast [x_0, x_1, ..., x_{k-1}] xk=wk∗[x0,x1,...,xk−1]
其中 ∗ \ast ∗代表卷积操作, [ x 0 , x 1 , . . . ] [x_0, x_1, ...] [x0,x1,...]表示将 x 0 , x 1 , . . . , x_0,x_1,..., x0,x1,..., concat 起来, w i w_i wi是权重, x i x_i xi是第 i i i个dense 层的输出。
如果我们想要通过反向传播来更新权重,其等式可以表示为:
w 1 ′ = f ( w 1 , g 0 ) w_1' = f(w_1, g_0) w1′=f(w1,g0)
w 2 ′ = f ( w 2 , g 0 , g 1 ) w_2' = f(w_2, g_0, g_1) w2′=f(w2,g0,g1)
w 3 ′ = f ( w 3 , g 0 , g 1 , g 2 ) w_3' = f(w_3, g_0, g_1, g_2) w3′=f(w3,g0,g1,g2)
w k ′ = f ( w k , g 0 , g 1 , . . . , g k − 1 ) w_k' = f(w_k, g_0, g_1,...,g_{k-1}) wk′=f(wk,g0,g1,...,gk−1)
其中 f f f是权重更新函数, g i g_i gi表示回传到第 i i i个dense 层的梯度。我们可以发现,在更新不同dense层的权重时,大量的梯度信息存在复用的情况。这会使得不同的dense层在不断学习重复的特征。

Cross Stage Partial DenseNet。单阶段CSPDenseNet的结构如图2(b)所示。CSPDenseNet的一个阶段由一个局部dense模块和一个局部transition层组成。在局部dense模块中,基础层的特征图被分为2个部分,通过通道 x 0 = [ x 0 ′ , x 0 ′ ′ ] x_0=[x_0', x_0''] x0=[x0′,x0′′]
。在 x 0 ′ ′ , x 0 ′ x_0'', x_0' x0′′,x0′中,前者直接与该阶段的末尾连接,后者会穿过整个dense模块。在一个局部transition层中:
- 首先,dense层的输出, [ x 0 ′ ′ , x 1 , . . . , x k ] [x_0'', x_1, ..., x_k] [x0′′,x1,...,xk]会经过一个 transition层。
- 其次,transition层的输出 x T x_T xT,会与 x 0 ′ ′ x_0'' x0′′ concat起来,然后经过另一个transition层,输出 x U x_U xU。
前向传播的等式和CSPDenseNet的参数更新如下所示:
x k = w k ∗ [ x 0 ′ ′ , x 1 , . . . , x k − 1 ] x_k = w_k \ast [x_{0''}, x_1, ...,x_{k-1}] xk=wk∗[x0′′,x1,...,xk−1]
x T = w T ∗ [ x 0 ′ ′ , x 1 , . . . , x k ] x_T = w_T \ast [x_{0''}, x_1, ...,x_{k}] xT=wT∗[x0′′,x1,...,xk]
x U = w U ∗ [ x 0 ′ , x T ] x_U = w_U \ast [x_{0'}, x_T] xU=wU∗[x0′,xT]
w k ′ = f ( w k , g 0 ′ ′ , g 1 , g 2 , . . . , g k − 1 ) w_k' = f(w_k, g_{0''}, g_1, g_2, ...,g_{k-1}) wk′=f(wk,g0′′,g1,g2,...,gk−1)
w T ′ = f ( w T , g 0 ′ ′ , g 1 , g 2 , . . . , g k − 1 ) w_T' = f(w_T, g_{0''}, g_1, g_2, ...,g_{k-1}) wT′=f(wT,g0′′,g1,g2,...,gk−1)
w U ′ = f ( w U , g 0 ′ , . . . , g T ) w_U' = f(w_U, g_{0'},...,g_{T}) wU′=f(wU,g0′,...,gT)
可以发现,一方面来自dense层的梯度会被单独整合起来。另一方面,没有经过dense层的特征图 x 0 ′ x_0' x0′也会被单独地整合起来。要更新权重的梯度信息时,这两部分不会包含对方重复的梯度信息。
总之,CSPDenseNet 保留了DenseNet的优点—特征复用特点,但同时通过截断梯度流,避免了大量的重复的梯度信息。为了实现这个想法,作者设计了一个层级特征融合策略,在局部transition层中使用。
Partial dense block。设计partial dense block的目的是:
- 增加梯度路径:通过拆分与融合策略,梯度路径的数量就增加了一倍。有了cross-stage策略,我们就可以缓解直接复制特征图来 concat 操作所带来的缺点。
- 平衡每层的计算量:通常,DenseNet 基础层的通道个数要远远大于 growth rate。因为partial dense block中 dense层操作的通道个数只是原来的一半,它就可以有效解决接近一半的算力瓶颈。
- 降低内存占用:假设dense block 的基础特征图大小是 w × h × c w\times h\times c w×h×c,growth rate 是 d d d,总共有 m m m个dense层。然后,该dense block的CIO就是 ( c × m ) + ( ( m 2 + m ) × d ) / 2 (c\times m)+((m^2+m)\times d)/2 (c×m)+((m2+m)×d)/2,partial dense block的CIO是 ( ( c × m ) + ( m 2 + m ) × d ) / 2 ((c\times m) + (m^2+m)\times d)/2 ((c×m)+(m2+m)×d)/2。 m m m和 d d d通常要远远小于 c c c,partial dense block能够节省最多一半的内存占用。

Partial transition layer。设计partial transition layer是为了最大化梯度组合的差异。Partial transition layer是一个层级特征融合机制,使用了梯度流截断的策略来防止不同的层学到重复的梯度信息。作者设计了两个不同的 CSPDenseNet 来介绍梯度流截断策略如何影响网络的性能。图3©和(d)是两个不同的融合策略。CSP(先融合)将两个部分输出的特征图 concat 起来,然后进行 transition 操作。如果采用此策略,会有大量的梯度信息被复用。至于CSP(后融合)策略,dense block 的输出会先通过 transition层,然后与第一部分的特征图进行 concat操作。如果我们采取CSP(后融合)策略,梯度信息就不会被复用,因为梯度流被提前截断了。如果我们用上图中的4个结构来进行图像分类,其各自的结果就如图4所示。我们可以看到,采用CSP(后融合)策略来图像分类,计算量会显著降低,而 top-1准确率只降低了 0.1 % 0.1\% 0.1%。另一方面,CSP(先融合)策略会明显地降低计算量,但是top-1准确率会下降 1.5 % 1.5\% 1.5%。通过跨阶段的拆分和融合策略,我们就可以在信息整合的过程中,有效地降低冗余的可能性。从图4中可以看到,我们可以有效地降低重复的梯度信息,网络的学习能力得到极大提升。

将CSPNet应用在其它网络结构上。CSPNet 也可以轻松地应用在 ResNet和ResNeXt上,结构如图5所示。由于只有一半的特征通道会经过 Res(X)模块,我们就无需再引入bottleneck layer。当FLOPs固定的时候,这就是理论上的MAC(memory access cost)下界。

3.2 Exact Fusion Model
看得准才能预测得准 :作者提出了EFM来获取每个anchor的Field of View(FoV),增强单阶段目标检测器的准确率。对于分割任务,由于像素级的标签通常不包含全局信息,我们更倾向于使用较大的图像区块来提取信息。但是,对于图像分类和目标检测任务,从图像级和边框级的标签上观察,一些重要的信息可能是比较模糊的。Li等人发现CNN学习图像级标签的时候,经常会转移注意力,这就是为什么双阶段检测器要比单阶段检测器效果好。
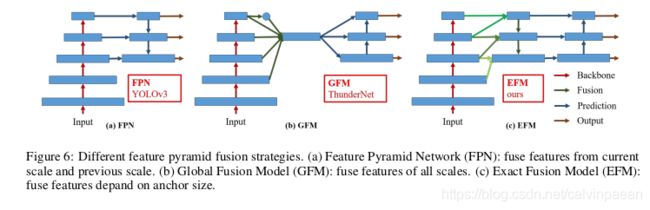
聚合特征金字塔:EFM能够更好地聚合特征金字塔。EFM基于YOLOv3而来,对于每个 ground truth 物体都有一个边框。每个ground truth边框都对应一个高于阈值IOU的 anchor box。如果anchor box 的大小与网格FoV相等,那么对于第 s s s尺度的网格来说,它里面的边框就是 s − 1 s-1 s−1尺度的下界与 s + 1 s+1 s+1尺度的上界。因此,EFM将三个尺度的特征组合了起来。
平衡计算量:因为特征金字塔中concat的特征图非常大,会增加内存占用与计算量。为了解决这个问题,作者提出了Maxout方法来压缩特征图。
4. Experiments
Pls read paper for more details.