【论文笔记】Ultra Reliable, Low Latency V2I Wireless Communications with Edge Computing
超可靠低延迟的V2I通信是无人驾驶汽车(AV)的关键要求。 为此,具有边缘计算功能的蜂窝小型基站(SBS)可以通过本地处理来自AV的任务请求来减少端到端(E2E)服务延迟,无需将任务转发到远程云服务器。 但是,由于SBS的计算能力有限,再加上无线带宽资源的稀缺性,最大程度地减小AV的E2E延迟并实现可靠的V2I网络是一项挑战。本文提出了一种新算法来联合优化AV与SBS的连接和带宽分配,以最大化V2I网络的可靠性。 他参考了劳动力匹配市场的算法,可以有效地执行AV与SBS的分布式关联,同时考虑AV的延迟需求以及SBS的有限计算和带宽资源。
介绍
与AV相关的大多数任务是需要低延迟的可靠处理。因此,V2I无线系统必须能够在严格的延迟和可靠性要求下管理AV的请求任务[5] – [7]。
蜂窝V2I通信与边缘计算集成的难点: 首先,小型小区BS(SBS)的计算资源有限,因此AV任务很容易使它们过载。 第二,在V2I系统中用于AV任务管理的端到端(E2E)延迟取决于:a)上行链路传输延迟(即,向SBS请求任务);b)边缘机的计算延迟;c)将处理后的任务发送给AV的下行传输延迟。一旦与异构任务和无线信道的随机变化结合在一起,在V2I网络中优化E2E服务质量(QoS)就变得非常具有挑战性,并且需要高效的AV-SBS协同以及无线和计算资源管理。
最近已出现一些解决上述V2I挑战的工作[5],[11]-[14]。 在[5]中,作者研究了传输时间间隔(TTI)对低延迟车辆通信性能的影响。 [12]调查了V2I网络中各种软件定义的延迟控制方案。 [13]开发了一种边缘计算框架来减少车辆服务的计算等待时间。[14]提出了用于实现低延迟车辆通信的另一种无线资源管理方法。 同时,大多数有关AV-SBS协同的工作(例如,参见[15]及其参考文献)的优化目标均为常规指标,例如最大信号干扰加噪声比(max-SINR)和最大接收信号强度指示符(max-RSSI )。
但是,[5],[11]-[14]中的都是孤立地研究计算和通信延迟的,而不是从端到端的角度。 例如,[5]中的工作考虑了计算延迟的固定值,而忽略了端到端延迟。 另外,[14]中的作者只关注无线资源管理,而没有考虑计算延迟。 此外,现有的工作大多依赖于集中式资源管理,而需要快速而有效的分布式算法来管理密集V2I网络中的任务。
资源管理的集中式和分布式的区别在于:前者的无线资源管理功能集中在一个高层网元中,后者将无线资源管理功能下放到底层的基站中,这样就节省了基站和高层网元信令交互传输的时间。
本文提出一个低延时的V2I通信框架,它可以通过联合优化AV-SBS的无线资源管理来提高可靠性。为此,我们基于匹配理论构建了一种新颖的解决方案,该解决方案可以解决AV任务的端到端时延要求以及SBS的有限计算和带宽资源带来的问题。 为了解决此问题,我们提出了一种新颖的算法,该算法将AV与SBS迭代关联,并分配带宽。 实践证明,该算法能够收敛于AV与SBS之间的核心分配,从而保证了V2I网络在使用分布式实现时的稳定性。 仿真结果表明,与max-SINR和maxRSSI作优化目标相比,该算法可最大程度地提高V2I系统的可靠性和最小化AV的E2E延迟。
系统模型

考虑面积为A的正方形区域的无线蜂窝网,由N个均匀分布的SBS组成,其整体记作 。在该网络中,M个AV组成的集合
。在该网络中,M个AV组成的集合 被随机部署,并且必须与SBS通信。 自然,AV的无缝运行需要实时管理多个任务。 表I总结了典型任务及其延迟要求的列表。 为了避免回程网络的延迟,SBS配备了边缘计算机,以处理来自AV的任务集合
被随机部署,并且必须与SBS通信。 自然,AV的无缝运行需要实时管理多个任务。 表I总结了典型任务及其延迟要求的列表。 为了避免回程网络的延迟,SBS配备了边缘计算机,以处理来自AV的任务集合 中的任务(比如单个AV无法完成的高清地图构建),并将必要的信息发送到AV。
中的任务(比如单个AV无法完成的高清地图构建),并将必要的信息发送到AV。

考虑到SBS的边缘计算能力,可以将AV m∈ 和SBS n∈ 之间的V2I通信的E2E传输时延定义为

其中T 是一个TTI的持续时间(以毫秒为单位),![]() (m,n; s)是任务s的传输时延。 另外,
(m,n; s)是任务s的传输时延。 另外,![]() (m,n; s)是在SBS n的边缘单元处理AV m的任务s的计算时延。 接下来,我们详细描述传输和处理延迟。
(m,n; s)是在SBS n的边缘单元处理AV m的任务s的计算时延。 接下来,我们详细描述传输和处理延迟。
整体的传输时延是上行和下行传输延迟的和:
![]()
其中![]() 表示下行传输时延,是AV m 将任务 s 发送到SBS n 所用的时延,由下计算:??
表示下行传输时延,是AV m 将任务 s 发送到SBS n 所用的时延,由下计算:??

-
 表示下行传输的任务 s 的包的尺寸/bit
表示下行传输的任务 s 的包的尺寸/bit -
分母表示一个TTI内传输的下行链路数据。为了有效利用时频资源,我们考虑了带宽为W的正交频分复用(OFDM)帧结构,他被均匀地分成K个子信道,用集合
 表示,每个子信道都有带宽
表示,每个子信道都有带宽  。 因此,下行速率为:
。 因此,下行速率为:
其中![]() = 1,表示子信道k被SBS n分配到 AV m,否则为0;可知下行链路的SINR:
= 1,表示子信道k被SBS n分配到 AV m,否则为0;可知下行链路的SINR:![]() 会影响下行速率:
会影响下行速率:

其中![]() 分别表示:SBS n的传输功率,SBS n‘对AV m的干扰,噪声功率。在(5)中,
分别表示:SBS n的传输功率,SBS n‘对AV m的干扰,噪声功率。在(5)中,![]() 和
和![]() 分别表示AV m和SBS n的天线增益。
分别表示AV m和SBS n的天线增益。 ![]() 和
和![]() 分别表示子信道k处的瑞利衰落信道增益和AV m与SBS n之间的下行链路路径损耗。 在低延迟V2I中TTI持续时间很小(约为一个OFDM符号持续时间[5]),因此,信道增益
分别表示子信道k处的瑞利衰落信道增益和AV m与SBS n之间的下行链路路径损耗。 在低延迟V2I中TTI持续时间很小(约为一个OFDM符号持续时间[5]),因此,信道增益![]() (和(4)中的速率)可以认为在一个数据包的传输过程中是恒定的 。
(和(4)中的速率)可以认为在一个数据包的传输过程中是恒定的 。
类似于(3),我们可以得到上行传输时延![]() ,上行链路的SINR由下式给出:
,上行链路的SINR由下式给出:

其中![]() 是AV m的发射功率,
是AV m的发射功率,![]() 是在子信道k’中传输的来自另一个AV m’的干扰。假设V2I中的上行链路流量主要是较小的数据包(例如,请求服务或发送短控制数据包),我们假设上行链路传输通过子信道k‘
是在子信道k’中传输的来自另一个AV m’的干扰。假设V2I中的上行链路流量主要是较小的数据包(例如,请求服务或发送短控制数据包),我们假设上行链路传输通过子信道k‘ 管理。??
管理。??
SBS的计算时延是一个随机变量。 这种随机性主要源于:任务的执行时间取决于要处理的数据[10]。此外SBS计算机的类型一致与否也会影响计算时延,类型不一致的SBS对同一个任务的计算时延将不同。由于这种不确定性,通常定义一个概率质量函数(pmf),用于表示由边缘机SBS  通过
通过 个时间步长 [10]来完成的任意任务
个时间步长 [10]来完成的任意任务 的计算时延。
的计算时延。
在不失一般性的前提下,我们考虑每个SBS使用一台边缘计算机。 在V2I方案中,可以将多个任务分配给SBS。 在这种情况下,分配给(SBS的)机器的任务在队列 µ(n) ⊆  中进行批处理。在这里,我们注意到任意任务 的完成时间pmf取决于队列µ(n)中的其他任务。 现在,通过对队列µ(n)中位于s之前的任务的执行时间pmf进行卷积,可以得到任务s∈μ(n)完成时间的pmf:
中进行批处理。在这里,我们注意到任意任务 的完成时间pmf取决于队列µ(n)中的其他任务。 现在,通过对队列µ(n)中位于s之前的任务的执行时间pmf进行卷积,可以得到任务s∈μ(n)完成时间的pmf:

圈星表示卷积,![]() 是在机器 中排队的任务的集合。通过上式,可以得到SBS中任务的预期完成时间:
是在机器 中排队的任务的集合。通过上式,可以得到SBS中任务的预期完成时间:

其中![]() 是 任务s进行之前的最大处理时间步数。
是 任务s进行之前的最大处理时间步数。
问题表述
考虑所提出的框架,目标是最大化V2I系统的可靠性,同时考虑每个AV任务的延迟要求。 考虑到这一点,我们定义伯努利随机变量 ,如下式:

其中![]() 是任务s的可容忍E2E延迟,即如果任务s在小于其E2E延迟约束的时间内成功管理则(m,n; s)= 1,否则,(m,n; s) = 0。基于(9)和3GPP的可靠性定义[16],我们可以将V2I系统可靠性定义为【此式的两个积项都是0/1】
是任务s的可容忍E2E延迟,即如果任务s在小于其E2E延迟约束的时间内成功管理则(m,n; s)= 1,否则,(m,n; s) = 0。基于(9)和3GPP的可靠性定义[16],我们可以将V2I系统可靠性定义为【此式的两个积项都是0/1】

对于![]() ,其中每个成员是 为
,其中每个成员是 为![]() 的带宽分配
的带宽分配 ![]() 。 同时,如果AV m与SBS n相关,则
。 同时,如果AV m与SBS n相关,则 = 1,否则 =0。实际上,从(10)可见,网络可靠性取决于:1)AV与SBS的关联性; 2)每个SBS的带宽分配。 计算时延依赖于与SBS相关的AV的子集,如(7)所示。 因此,为了最大化可靠性η,面临的挑战是共同找到最佳的AV-SBS关联和资源分配,同时考虑到一个AV的传输和计算延迟受其他AV影响的事实。
= 1,否则 =0。实际上,从(10)可见,网络可靠性取决于:1)AV与SBS的关联性; 2)每个SBS的带宽分配。 计算时延依赖于与SBS相关的AV的子集,如(7)所示。 因此,为了最大化可靠性η,面临的挑战是共同找到最佳的AV-SBS关联和资源分配,同时考虑到一个AV的传输和计算延迟受其他AV影响的事实。
AV m∈
= 1表示子信道k被SBS n分配到 AV m
到这里我们可以表述 AV-SBS协同和资源分配问题如下:

约束(12)和(13)表示每个AV最多与一个SBS相连、每个SBS最多与M个AV相连
(14)表示每个SBS的下行传输可以使用K个子信道
(15)确保每个小区内的子信道正交
最大化可靠性问题是一个NP-hard问题,其很难解决。下面我们提出通过以下架构解决这个问题
对低延迟V2I通信的匹配策略
为了在(11)-(16)的约束下共同优化AV-SBS关联策略和带宽分配,必须找到一种快速收敛的算法。 为此,我们基于匹配理论构建解决方案,尤其是,通过使用劳力市场中工人到公司的分配问题来模拟从AV到SBS的关联问题[18]。也就是说,考虑到一组工人(AVs)和一组公司(SBS),每个工人的目标是以尽可能高的薪水聘用,而公司的目的是雇用一部分使他们的收入最大化的工人。 接下来,使用这个双向框架,我们展示如何将V2I资源管理问题表达为劳动力匹配市场。
【A. SBS和AV的效用函数】
这里的效用函数,英文为Utility Function,文章将其视为目标函数来使用
为确保网络的低延时通信,每个SBS n可以以选择一组AV和对应的带宽分配策略,目标是最大化下面的效用函数

传输延迟![]() 在(2)式中给出,AV组
在(2)式中给出,AV组 ![]() 的任务的计算时延是随机和未知。在式(17)中,SBS根据式(8)估计AV组的计算时延。式(17)的第一项与AV的带宽
的任务的计算时延是随机和未知。在式(17)中,SBS根据式(8)估计AV组的计算时延。式(17)的第一项与AV的带宽  成反比,
成反比, 是一个控制系数。分配的带宽可以视作服务AV的cost,因此,(17)的第一项将防止带宽分配的不公平。类比劳动力匹配市场,(17)中的第一项中的是公司支付给工人的工资。
是一个控制系数。分配的带宽可以视作服务AV的cost,因此,(17)的第一项将防止带宽分配的不公平。类比劳动力匹配市场,(17)中的第一项中的是公司支付给工人的工资。
这里的
是传输时延,
是计算时延
每个AV m旨在与SBS相关联,并使端到端的延迟最小。但AV不知道其各自的任务在SBS的计算延迟。这是因为任务的计算延迟也和其他与该SBS相连的AV有关,如(7)所示。该信息由SBS提供。因此 AV  的效用是:
的效用是:

![]() 由资源分配向量
由资源分配向量 决定。
决定。
【B.将V2I通信视作匹配问题】
使用为AV和SBS的效用函数,我们将提出的匹配问题定义如下:
定义 1. 一个AV-SBS的匹配映射 f :
- 对任意AV m,
。
表示AV m未分配到任何SBS
- 对任意SBS n,
# 这里的
表示SBS n所连接的所有的AV
,iif
此定义还要确保满足(12)(13)的可行性约束
此外,服从带宽分配矢量![]() 的映射可表示为
的映射可表示为![]() , 如果满足以下条件,则称为 个体合理分配(individually rational):1)对于任何分配给SBS f(m)的AV,
, 如果满足以下条件,则称为 个体合理分配(individually rational):1)对于任何分配给SBS f(m)的AV,![]() > 0 # 表示AV m 和SBS f(m)之间的信道不为0; 2)对于任何SBS n,0 <
> 0 # 表示AV m 和SBS f(m)之间的信道不为0; 2)对于任何SBS n,0 <![]() <∞ # SBS的效用必须是非负且有限的。 我们的目标是在个体合理的基础上找到AV到SBS的严格最佳(core)搭配,如下所述。
<∞ # SBS的效用必须是非负且有限的。 我们的目标是在个体合理的基础上找到AV到SBS的严格最佳(core)搭配,如下所述。
定义 2.一个个体合理分配的AV-SBS对(f ; w)是一个最佳搭配,如果不存在AV-SBS M'的配对(n, M')(对应带宽分配矢量
)能做到:
,for all m
M‘
若存在满足以上两个条件的(n, M'),则可以通过阻断(blocking)映射f来改进他们的效用,并充分形成一个分配方案。本来,最佳搭配的概念就是通过阻止不理想的SBS-AV分配来保证V2I系统的稳定性。
但是找到最佳的AV到SBS的搭配具有很困难,因为AV和SBS的相互依赖的效用是基于以下两个事实:1)从(7)中,分配到同一SBS的AV的处理延迟相互关联 ; (2)根据(14),对一个AV分配的带宽取决于对同一小区内的其他AV的资源分配。实际上,诸如延迟接受算法[19]之类的经典方法无法为V2I问题[18]产生核心分配。 因此,我们接下来提出一种新算法,该算法可确保找到AV对SBS的核心分配。
联合AV-SBS分配和资源管理的匹配算法
这里先按照人力市场的背景下解释一下此算法:
- step1:第一轮中,每个公司为每个求职者安排一个工资,然后求职者比较以下收到的offer,可以选择拒绝某个offer
- 当有求职者拒绝offer时,进入step2
- step2:每一轮中公司都要重新为求职者(但这里不一定是给每个人都要安排)安排一个工资,公司计算根据他发出去的offer算一算得到哪些人可让公司效益最大化,列出人员清单
- step3:综合考虑
- step4:每个人接收本轮中他受到的最好的offer,并拒绝其他offer
保证最佳搭配的关键思想是允许在执行AV-SBS关联时调整AV和SBS之间的带宽。 也就是说,SBS可为每个AV提供一个确定的端到端延迟(通过分配多个子信道),而AV可以接受报价或拒绝报价以与另一个SBS更好地分配。基于此思想,我们在表II中提出了一种新颖的算法,该算法如下进行:最初在回合j = 0,每个SBS为每个AV分配一个子信道。 随着算法的进行,每个SBS n在第j轮更新更新带宽分配向量![]() 。 更新规则:如果AV在第j-1轮中拒绝了SBS n的报价,则
。 更新规则:如果AV在第j-1轮中拒绝了SBS n的报价,则![]() ; 否则,
; 否则,![]() 。
。

在任一轮 j上,根据带宽分配![]() ,每个SBS n∈N选择一个AV子集,以最大化其效用(17)。 在步骤2中执行AV选择过程。随后在步骤3中,综合考虑所有AV并根据自己的效用函数来选择一些AV,这些AV列入SBS的关联列表中,如果本轮的信道分配没有被AV拒绝,则在下一轮重复这个分配数值。 在步骤4中,每个AV暂时接受在(18)中最大化其效用的报价,并拒绝其余的报价。 最后,在步骤5中,SBS根据先前解释的规则来更新其带宽分配矢量
,每个SBS n∈N选择一个AV子集,以最大化其效用(17)。 在步骤2中执行AV选择过程。随后在步骤3中,综合考虑所有AV并根据自己的效用函数来选择一些AV,这些AV列入SBS的关联列表中,如果本轮的信道分配没有被AV拒绝,则在下一轮重复这个分配数值。 在步骤4中,每个AV暂时接受在(18)中最大化其效用的报价,并拒绝其余的报价。 最后,在步骤5中,SBS根据先前解释的规则来更新其带宽分配矢量![]() ,∀n∈N。 一旦AV没有拒绝报价,该算法就会收敛。 在证明所提出的算法收敛于最佳搭配之前,我们进行了以下初步观察:
,∀n∈N。 一旦AV没有拒绝报价,该算法就会收敛。 在证明所提出的算法收敛于最佳搭配之前,我们进行了以下初步观察:
备注1.每个AV在每一轮中至少有一个关联报价。
步骤1中,每个SBS将关联提议发送到所有AV。 由于在任何回合中,每个AV暂时都接受一个报价,在下一回合为此AV分配的带宽保持不变。 此外,从第3步开始,任何未被拒绝的报价都必须在下一轮中重复。 因此,在任何回合中,AV至少具有一个关联报价。
引理1. 经历有限的回合之后,每个AV都将有一个唯一的报价,算法收敛。
证明: 由备注1,我们注意到每个AV在每个回合中至少都有一个报价。 此外,根据步骤5中的带宽分配规则,下一轮SBS为AV分配的带宽必比上一轮大,除了接受其offer的AV。 同时,根据(17),SBS的效用是分配带宽的递减函数。 因此,随着算法的进行,每个AV收到的offer数量减少,直到每个AV仅接收到它接受的一个offer(带宽分配)。 由于此时没有拒绝发生,因此该算法收敛。
引理2. 表II中提出的算法收敛的最终结果为,AV和SBS的个体合理分配。
证明: 令![]() 为经历j*次迭代所到达的收敛点的结果,因为在步骤1中,每个AV至少被分配到一个信道,在步骤5中,每一轮的带宽分配都要下降,因此对于所有m∈,
为经历j*次迭代所到达的收敛点的结果,因为在步骤1中,每个AV至少被分配到一个信道,在步骤5中,每一轮的带宽分配都要下降,因此对于所有m∈,![]() 。从步骤2的AV选择过程中,由任意SBS n选择的AV子集
。从步骤2的AV选择过程中,由任意SBS n选择的AV子集![]() 将产生有限的正效用
将产生有限的正效用![]() 。 因此,经过j ∗次迭代,
。 因此,经过j ∗次迭代,![]() 将为正,由此得证。
将为正,由此得证。
定理1. 表II中提出的算法保证收敛的结果中 AV和SBS的最佳搭配。
证明: 引理1显示了任意j *次迭代后所提出算法的收敛性。 令算法的结果为![]() 。我们通过反证法证明此结果是最佳搭配。假设此结果不是严格的核心分配。由于引理2中的
。我们通过反证法证明此结果是最佳搭配。假设此结果不是严格的核心分配。由于引理2中的![]() 是有理数,所以必须有一个SBS和a的阻塞对。 具有带宽分配矢量ˆ wn的AV子集(n,M 0),使得∀m∈M 0:
是有理数,所以必须有一个SBS和a的阻塞对。 具有带宽分配矢量ˆ wn的AV子集(n,M 0),使得∀m∈M 0:

根据(19),在该算法的任何回合中,任何AV m∈M 0都绝不能从SBS n接收到带宽分配为ˆ w mn(或大于ˆ w mn)的提议。 否则,AV m将接受该报价。 同时,由于在每一轮之后分配给每个AV的带宽增加或保持恒定(根据步骤5中的更新规则),所以为了使SBS n与M 0中的AV形成阻塞对,带宽分配必须满足ˆ w 对于所有m∈M 0,mn≥w mf(m)。但是,鉴于SBS的效用是分配带宽的递减函数,则
其中(21)中的严格不等式直接由(20)引起。 实际上,(21)暗示SBS n将向M 0中的AV子集提出带宽分配矢量w n(j ∗),这与算法收敛的初始假设相矛盾。 因此,不存在这样的阻塞对,从而确保了对核心分配的收敛。
性能评估
【A. 仿真参数】
我们考虑一个面积为100 m×100 m的区域,其中AV和SBS随机分布在该区域中。 我们考虑10个SBS,而AV的数量从10到40不等。统计结果是大量独立运行的平均值。表III总结了仿真参数。

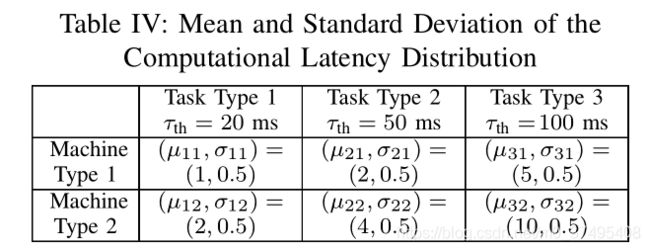
此外,我们从集合S = {s 1,s 2,s 3}中的三种任务类型为每个AV分配一个随机任务。 根据SBS的边缘计算能力,我们考虑两种具有不同等待时间分布的SBS来管理S中的任务。对于在机器类型j∈{1,2}上处理的每个任务si∈S,其pmf 计算等待时间遵循高斯分布N(μij,σ2 ij),均值μij和方差σ2 ij [10],如表IV所示。 表IV中还指定了每种任务类型可容忍的E2E延迟。 我们将提出的算法与Max-SINR和Max-RSSI关联的性能进行比较。
【B.仿真结果】
图2显示了M = 40 AVs和N = 10 SBSs的V2I网络中可靠性的累积分布函数(CDF)。 图2中的结果表明,所提出的算法明显优于max-SINR和maxRSSI方案。 例如,在所提出的方案中,可靠性低于0.8的概率仅为30%,而max-SINR和max-RSSI的概率分别为95%和85%。 这种性能提升主要是由于执行AV到SBS关联和带宽分配时考虑了E2E延迟,而基准方案并未优化E2E延迟。

图3展示了E2E延时的CDF并比较了在一个V2I网络中三种不同方案的表现(在M=40,N=10下)。首先我们可以发现提出的方案可以以接近99%的高概率保证50 ms的端到端延迟。 但是,这两种基线方法都只能以小于90%的概率满足E2E延迟要求。 对于具有M = 40个AV的大型V2I网络,图3中的结果表明,所提出的算法可以有效地最小化E2E延迟。 显然,随着网络负载的减少,端到端延迟将减少。

为了显示传输和计算延迟对总体E2E延迟的影响,在M = 40 AV和N = 10 SBS的情况下,分别在图4和5中显示了这些度量的CDF。 将图4中的传输等待时间的值与图5中的计算等待时间进行比较,我们可以观察到边缘计算机的计算延迟是很长的(可以达到100 ms)并且不能忽略。 此外,图5显示,与基线算法相比,该方案考虑了计算延迟和每个边缘机的负载量,所以产生了更有效的AV到SBS关联。 这个特点可以看作是完成了负载平衡,我们的方法重点考虑每个SBS上分配任务的计算负载,而非AV的数量。

图6展示了每个AV的平均下行数据速率与AV数量的关系。显然,随着网络中AV的增多,AV的平均速率会降低。 结果如图6所示,提出的算法在数据速率方面明显优于基线方法。 例如,在M = 20 AV的V2I网络中,性能相比max-RSSI 和max-SINR方案,提升分别为49%和90%,

最后,图7显示了所提出算法的迭代次数(置信误差条为95%)相对于AV的数量的关系。 图7中的结果表明,即使对于具有10个SBS和30个AV的大型V2I网络,迭代次数也不会超过60。此外,结果表明迭代次数相对网络规模是多项式关系。

结论
在本文中,我们提出了一种用于自动驾驶汽车的超可靠,低延迟的车辆到基础设施通信的新颖框架。 我们已经表明,通过将AV间相互影响导致的计算延迟以及无线网络中的传输延迟联合考虑,所提出的框架可以最大化V2I网络的可靠性。 在这方面,我们基于劳动力匹配市场的概念提出了一种新颖的算法,该算法允许将AV与SBS进行分布式关联,同时考虑到每个SBS的有限计算和带宽资源。 此外,我们已经证明了该算法对AV到SBS的核心分配的收敛性。 仿真结果表明了该方案的各种优点。