第十一届蓝桥杯嵌入式省赛程序设计题(HAL库版)
蓝桥杯嵌入式(HAL库版)省赛系列文章
第六届蓝桥杯嵌入式省赛程序设计题(HAL库版)
第九届蓝桥杯嵌入式省赛程序设计题(HAL库版)
第十届蓝桥杯嵌入式省赛程序设计题(HAL库版)
第十三届蓝桥杯嵌入式省赛程序设计题(HAL库版)
第十一届蓝桥杯嵌入式省赛程序设计题(HAL库版)
- 蓝桥杯嵌入式(HAL库版)省赛系列文章
- 一、赛题要求
-
- 1. 硬件框图
- 2. 功能要求
- 二、配置工程
-
- 1. 配置流程
- 1.1 选择芯片
- 1.2 配置引脚
- 1.3 配置时钟
- 1.4 建立工程
- 三、软件实现
- 总结
一、赛题要求
1. 硬件框图

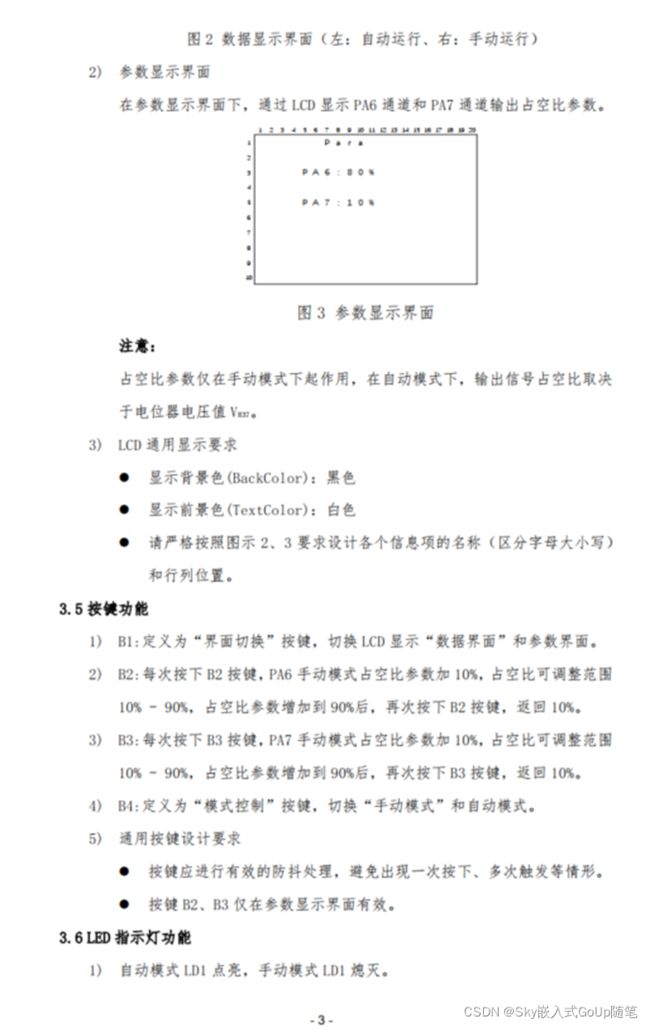
2. 功能要求


二、配置工程
1. 配置流程
根据题目要求,需要用到以下资源:
- 一个ADC通道(PB15)用于测量R37电压(CT117E-M4中为PB15,不是PB0)
- 两路PWM信号(PA6和PA7)
- 四个按键(PB0,PB1,PB2,PA0)
- 一个定时器,用于精准控时0.1秒
- LCD外设屏幕
- LED1和LED2灯(PC8,PC9)以及LED锁存控制引脚PD2
1.1 选择芯片
根据比赛要求,选择STM32G431RBTx芯片进行配置
1.2 配置引脚
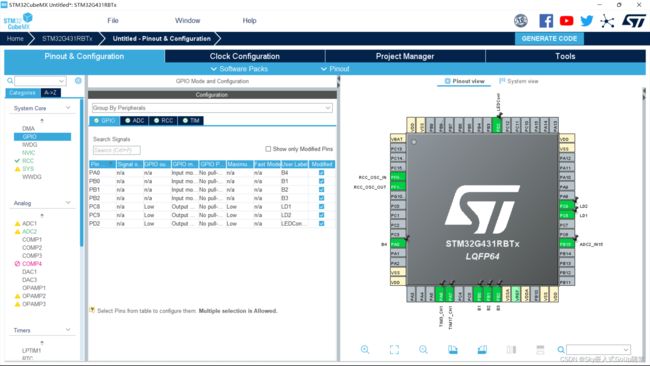
1.3 配置时钟

1.4 建立工程

三、软件实现
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "lcd.h"
#include "stdio.h"
#include "string.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
ADC_HandleTypeDef hadc2;
TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim17;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC2_Init(void);
static void MX_TIM2_Init(void);
static void MX_TIM3_Init(void);
static void MX_TIM17_Init(void);
uint8_t KEY_Scan(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin);
char ADC_TEXT[30];
char Duty_100Hz_TEXT[30];
char Duty_200Hz_TEXT[30];
uint8_t MODE_FLAG = 0;
uint8_t KEYB1_FLAG = 0;
uint8_t KEYB2_FLAG = 0;
uint8_t KEYB3_FLAG = 0;
uint8_t KEYB4_FLAG = 0;
uint16_t Duty_100Hz = 1000;
uint16_t Duty_200Hz = 1000;
uint16_t Duty_MANU_100Hz(uint16_t Duty_Manu_100Hz);
uint16_t Duty_MANU_200Hz(uint16_t Duty_Manu_200Hz);
double adc;
double V;
double GET_ADC(void);
void MODE_Change(void);
void Interface_Change(void);
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC2_Init();
MX_TIM2_Init();
MX_TIM3_Init();
MX_TIM17_Init();
HAL_TIM_PWM_Start_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_PWM_Start_IT(&htim17,TIM_CHANNEL_1);
LCD_Init();
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
/* Infinite loop */
while (1)
{
V = GET_ADC();
//Data Interface
if(MODE_FLAG == 0)
{
sprintf(ADC_TEXT," V:%.2fV ",V);
LCD_SetTextColor(White);
LCD_DisplayStringLine(Line0,(uint8_t*)" Data ");
LCD_DisplayStringLine(Line3,(uint8_t*)ADC_TEXT);
//Data Interface -> LED2 ON
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);
HAL_GPIO_WritePin(LD2_GPIO_Port,GPIO_PIN_9,GPIO_PIN_RESET);
HAL_GPIO_WritePin(LEDControl_GPIO_Port,LEDControl_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(LEDControl_GPIO_Port,LEDControl_Pin,GPIO_PIN_RESET);
//Auto Mode -> LED1 ON
if(KEYB4_FLAG == 0)
{
HAL_GPIO_WritePin(LD1_GPIO_Port,GPIO_PIN_8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(LEDControl_GPIO_Port,LEDControl_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(LEDControl_GPIO_Port,LEDControl_Pin,GPIO_PIN_RESET);
LCD_DisplayStringLine(Line5,(uint8_t*)" Mode:AUTO ");
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,10000*V/3.3);
__HAL_TIM_SET_COMPARE(&htim17,TIM_CHANNEL_1,10000*V/3.3);
}
//MANU Mode -> LED1 OFF
if(KEYB4_FLAG == 1)
{
HAL_GPIO_WritePin(LD1_GPIO_Port,GPIO_PIN_8,GPIO_PIN_SET);
HAL_GPIO_WritePin(LEDControl_GPIO_Port,LEDControl_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(LEDControl_GPIO_Port,LEDControl_Pin,GPIO_PIN_RESET);
LCD_DisplayStringLine(Line5,(uint8_t*)" Mode:MANU ");
}
}
//Para Interface
if(MODE_FLAG == 1)
{
LCD_DisplayStringLine(Line0,(uint8_t*)" Para ");
//Para Interface -> LED2 OFF
HAL_GPIO_WritePin(LD2_GPIO_Port,GPIO_PIN_All,GPIO_PIN_SET);
HAL_GPIO_WritePin(LEDControl_GPIO_Port,LEDControl_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(LEDControl_GPIO_Port,LEDControl_Pin,GPIO_PIN_RESET);
//Auto Mode
if(KEYB4_FLAG == 0)
{
HAL_GPIO_WritePin(LD1_GPIO_Port,GPIO_PIN_8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(LEDControl_GPIO_Port,LEDControl_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(LEDControl_GPIO_Port,LEDControl_Pin,GPIO_PIN_RESET);
sprintf(Duty_100Hz_TEXT," PA6:%.0f%% ",100*V/3.3);
LCD_DisplayStringLine(Line3,(uint8_t*)Duty_100Hz_TEXT);
sprintf(Duty_200Hz_TEXT," PA7:%.0f%% ",100*V/3.3);
LCD_DisplayStringLine(Line5,(uint8_t*)Duty_200Hz_TEXT);
}
//MANU Mode
if(KEYB4_FLAG == 1)
{
sprintf(Duty_100Hz_TEXT," PA6:%d%% ",Duty_100Hz/100);
LCD_DisplayStringLine(Line3,(uint8_t*)Duty_100Hz_TEXT);
sprintf(Duty_200Hz_TEXT," PA7:%d%% ",Duty_200Hz/100);
LCD_DisplayStringLine(Line5,(uint8_t*)Duty_200Hz_TEXT);
Duty_100Hz = Duty_MANU_100Hz(Duty_100Hz);
Duty_200Hz = Duty_MANU_200Hz(Duty_200Hz);
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,Duty_100Hz);
__HAL_TIM_SET_COMPARE(&htim17,TIM_CHANNEL_1,Duty_200Hz);
}
}
Interface_Change();
MODE_Change();
}
/* USER CODE END 3 */
}
uint16_t Duty_MANU_100Hz(uint16_t Duty_Manu_100Hz)
{
if(KEY_Scan(B2_GPIO_Port,B2_Pin) == 1)
{
Duty_Manu_100Hz += 1000;
if(Duty_Manu_100Hz == 10000)
Duty_Manu_100Hz = 1000;
}
return Duty_Manu_100Hz;
}
uint16_t Duty_MANU_200Hz(uint16_t Duty_Manu_200Hz)
{
if(KEY_Scan(B3_GPIO_Port,B3_Pin) == 1)
{
Duty_Manu_200Hz += 1000;
if(Duty_Manu_200Hz == 10000)
Duty_Manu_200Hz = 1000;
}
return Duty_Manu_200Hz;
}
void MODE_Change(void)
{
if(KEY_Scan(B4_GPIO_Port,B4_Pin) == 1)
{
KEYB4_FLAG ++;
LCD_Clear(Black);
}
if(KEYB4_FLAG > 1)
{
KEYB4_FLAG = 0;
LCD_Clear(Black);
}
}
void Interface_Change(void)
{
if(KEY_Scan(B1_GPIO_Port,B1_Pin) == 1)
{
MODE_FLAG ++;
LCD_Clear(Black);
}
if(MODE_FLAG >1)
{
MODE_FLAG = 0;
LCD_Clear(Black);
}
}
//Pressed:1 UnPressed:0
uint8_t KEY_Scan(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin)
{
if(HAL_GPIO_ReadPin(GPIOx,GPIO_Pin) == RESET)
{
while (HAL_GPIO_ReadPin(GPIOx,GPIO_Pin) == RESET);
return 1;
}
else
return 0;
}
double GET_ADC()
{
HAL_ADC_Start(&hadc2);
adc = HAL_ADC_GetValue(&hadc2);
return (adc*3.3/4096);
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV3;
RCC_OscInitStruct.PLL.PLLN = 20;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief ADC2 Initialization Function
* @param None
* @retval None
*/
static void MX_ADC2_Init(void)
{
/* USER CODE BEGIN ADC2_Init 0 */
/* USER CODE END ADC2_Init 0 */
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC2_Init 1 */
/* USER CODE END ADC2_Init 1 */
/** Common config
*/
hadc2.Instance = ADC2;
hadc2.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2;
hadc2.Init.Resolution = ADC_RESOLUTION_12B;
hadc2.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc2.Init.GainCompensation = 0;
hadc2.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc2.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
hadc2.Init.LowPowerAutoWait = DISABLE;
hadc2.Init.ContinuousConvMode = DISABLE;
hadc2.Init.NbrOfConversion = 1;
hadc2.Init.DiscontinuousConvMode = DISABLE;
hadc2.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc2.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc2.Init.DMAContinuousRequests = DISABLE;
hadc2.Init.Overrun = ADC_OVR_DATA_PRESERVED;
hadc2.Init.OversamplingMode = DISABLE;
if (HAL_ADC_Init(&hadc2) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_15;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_2CYCLES_5;
sConfig.SingleDiff = ADC_SINGLE_ENDED;
sConfig.OffsetNumber = ADC_OFFSET_NONE;
sConfig.Offset = 0;
if (HAL_ADC_ConfigChannel(&hadc2, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC2_Init 2 */
/* USER CODE END ADC2_Init 2 */
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 80-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 999;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
}
/**
* @brief TIM3 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 80-1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 9999;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = Duty_100Hz;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
HAL_TIM_MspPostInit(&htim3);
}
/**
* @brief TIM17 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM17_Init(void)
{
/* USER CODE BEGIN TIM17_Init 0 */
/* USER CODE END TIM17_Init 0 */
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
/* USER CODE BEGIN TIM17_Init 1 */
/* USER CODE END TIM17_Init 1 */
htim17.Instance = TIM17;
htim17.Init.Prescaler = 40-1;
htim17.Init.CounterMode = TIM_COUNTERMODE_UP;
htim17.Init.Period = 9999;
htim17.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim17.Init.RepetitionCounter = 0;
htim17.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim17) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim17) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = Duty_200Hz;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim17, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.BreakFilter = 0;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim17, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM17_Init 2 */
/* USER CODE END TIM17_Init 2 */
HAL_TIM_MspPostInit(&htim17);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOF_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LEDControl_GPIO_Port, LEDControl_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin : B4_Pin */
GPIO_InitStruct.Pin = B4_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(B4_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : B1_Pin B2_Pin B3_Pin */
GPIO_InitStruct.Pin = B1_Pin|B2_Pin|B3_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pins : LD1_Pin LD2_Pin */
GPIO_InitStruct.Pin = GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : LEDControl_Pin */
GPIO_InitStruct.Pin = LEDControl_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LEDControl_GPIO_Port, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
总结
上述代码并未使用中断,使用的是查询的方式,如果使用中断,则思路为:对按键中断服务函数进行PWM的占空比的修改以及界面的修改,调用3个中断服务函数即可。
虽然本届赛题难度不高,但笔者能力有限,如果文章有什么问题大家可以随时私信或评论我给我指出,如果大家有什么别的问题也欢迎来与我进行交流!