C++(ALL) STL ATL Opencv 视觉图像实践进展记录
目录
检索文件夹中的图片名——可用于批量读取图片
C++ 创建文件夹并检测指定文件的个数
C++ 检测指定文件的个数
C++ 多线程
C++ 常见错误解决
"Error: "const char"类型的实参与"LPCWSTR"类型的形参不兼容",解决方法:
operator()
找数组最大最小值
图像增强——RGB图分离并均衡化
图像增强——RGB图分离并对数log变换
图像增强——滤波器
图像增强——高反差
图像增强——边缘增强
形态学——膨胀腐蚀
图像分割
图像分割——OTSU阈值
图像分割——Kmeans
图像滤波
多种滤波器
轮廓
findContours
drawContours
boundingRect
minAreaRect
轮廓子程序
图像特征提取思路
ATL::CImage读取图片
ATL::CImage转Mat
C++ 图像处理——滤波
C++ Opencv HSV
C++ Opencv 双边滤波
C++ Opencv 图像特征( Opencv3)
C++ Opencv 图像特征brisk s
C++ Opencv hog+svm
C++ Opencv 颜色、纹理、形状+svm
主函数
子程序
子函数
C++ Opencv HU、MOM、GLCM
C++ Opencv hog+SVM(opencv3)
C++ Opencv 特征AKAZE(opencv3.3.0)
C++ Opencv 矩形分割
C++ vector容器打印
C++ FlyCapture相机
C++ Modbus通信
C++ Opencv xml调用
C++ Opencv xvid编码录像
C++ Opencv glcm
C++ Opencv 同态滤波
C++ Opencv hsv的h直方图
C++ Opencv HSV H、S、V直方图
C++ ATL::CImage和Mat的转换
C++ Opencv 图像目标分割
C++ Opencv 特征Feature.h{颜色、形状、纹理}
C++ vector操作
C++ io头文件进行zhi指定文件夹的文件名获取+文件个数返回
检索文件夹中的图片名——可用于批量读取图片
/*
#include
using namespace std;
*/
std::string img_dir = "C:\\Users\\Administrator\\Desktop\\样品\\目标分割结果\\";
for (int i = 0; i < 6; i++){
string pos;
stringstream ss;
ss << i;
ss >> pos;
string img_name = img_dir + "test" + pos + ".bmp";
cout << img_name << endl;
}
system("pause"); 
C++ 创建文件夹并检测指定文件的个数
// 创建文件夹
string dirName = "save";
bool flag = CreateDirectory(dirName.c_str(), NULL);
//读取指定文件夹的文件数目
cv::String pattern = "./save/*.bmp";//
size_t cout;
cout = read_images_in_folder(pattern);
// 保存图片
char filesave[100];
cout++;//全局变量进行命名统一名称累加保存
sprintf_s(filesave, "./save/save%d.bmp", cout);
imwrite(filesave, my_camera.src);//保存图片到当前项目位置
//读取当前文件夹图片的个数子程序
size_t read_images_in_folder(cv::String pattern)//读取当前指定目录的图片的个数
{
vector fn;
glob(pattern, fn, false);//OpenCV自带一个函数glob()可以遍历文件
size_t count = fn.size(); //number of png files in images folder
return count;
} C++ 检测指定文件的个数
//读取当前文件夹图片的个数子程序
/*
cv::String pattern = "./save/*.bmp";
int cout = read_images_in_folder(pattern);
*/
size_t read_images_in_folder(cv::String pattern)//读取当前指定目录的图片的个数
{
vector fn;
glob(pattern, fn, false);//OpenCV自带一个函数glob()可以遍历文件
size_t count = fn.size(); //number of png files in images folder
return count;
} C++ 多线程
#include
#include //多线程
#include //mutex是用来保证线程同步的,防止不同的线程同时操作同一个共享数据。但是使用mutex是不安全的,当一个线程在解锁之前异常退出了,那么其它被阻塞的线程就无法继续下去。
using namespace std;
int cnt = 20;
mutex m;
void t1()
{
while (cnt > 0)
{
lock_guard lockGuard(m);//lock_guard则相对安全,它是基于作用域的,能够自解锁,当该对象创建时,它会像m.lock()一样获得互斥锁,当生命周期结束时,它会自动析构(unlock),不会因为某个线程异常退出而影响其他线程。
if (cnt > 0)
{
--cnt;
cout << cnt << endl;
}
}
}
void t2()
{
while (cnt > 0)
{
lock_guard lockGuard(m);
if (cnt > 0)
{
--cnt;
cout << "t2";
cout << cnt << endl;
}
}
}
int main()
{
thread th1(t1);
thread th2(t2);
th1.join();//线程执行后才执行下一个线程
th2.join();
system("pause");
return 0;
} C++ 常见错误解决
"Error: "const char"类型的实参与"LPCWSTR"类型的形参不兼容",解决方法:
项目菜单——项目属性(最后一个)——配置属性——常规——项目默认值——字符集,将使用Unicode字符集改为未设置即可。
operator()
IntelliSense: 在没有适当 operator() 的情况下调用类类型的对象或将函数转换到指向函数的类型
找数组最大最小值
// 计算最大最小值
/*
float p[10] = { 1, 20, 2.3, 3.3, 5, -0.22, 5, 40, 5, 4 };
int length = 10;
float max = 0;
float min = 0;
feature_class.normalize_nolinear(p,length,max,min);
cout<<"max:"< p[i])
{
min = p[i];
}
}
} 图像增强
图像增强——RGB图分离并均衡化
Mat src = imread(argv[i]);
Mat imageRGB[3];
split(src, imageRGB);
for (int i = 0; i < 3; i++)
{
equalizeHist(imageRGB[i], imageRGB[i]);
}
merge(imageRGB, 3, src);图像增强——RGB图分离并对数log变换
Mat image = imread(argv[i]);
Mat imageLog(image.size(), CV_32FC3);
for (int i = 0; i < image.rows; i++)
{
for (int j = 0; j < image.cols; j++)
{
imageLog.at(i, j)[0] = log(1 + image.at(i, j)[0]);
imageLog.at(i, j)[1] = log(1 + image.at(i, j)[1]);
imageLog.at(i, j)[2] = log(1 + image.at(i, j)[2]);
}
}
//归一化到0~255
normalize(imageLog, imageLog, 0, 255, CV_MINMAX);
//转换成8bit图像显示
convertScaleAbs(imageLog, imageLog);
图像增强——滤波器
// 滤波器
void sharpenImage(const cv::Mat &image, cv::Mat &result)
{
//创建并初始化滤波模板
/*滤波核为拉普拉斯核3x3:
0 -1 0
-1 5 -1
0 -1 0
*/
cv::Mat kernel(3, 3, CV_32F, cv::Scalar(0));
kernel.at(0, 1) = -1.0;
kernel.at(1, 0) = -1.0;
kernel.at(1, 1) = 5.0;
kernel.at(1, 2) = -1.0;
kernel.at(2, 1) = -1.0;
result.create(image.size(), image.type());
//对图像进行滤波
cv::filter2D(image, result, image.depth(), kernel);
} 图像增强——高反差
Mat HighPass(Mat img)
{
Mat temp;
GaussianBlur(img, temp, Size(7, 7), 1.6, 1.6);
int r = 3;
Mat diff = img + r*(img - temp); //高反差保留算法
return diff;
}图像增强——边缘增强
void edgeEnhance(cv::Mat& srcImg, cv::Mat& dstImg)
{
if (!dstImg.empty())
{
dstImg.release();
}
std::vector rgb;
if (srcImg.channels() == 3) // rgb image
{
cv::split(srcImg, rgb);
}
else if (srcImg.channels() == 1) // gray image
{
rgb.push_back(srcImg);
}
// 分别对R、G、B三个通道进行边缘增强
for (size_t i = 0; i < rgb.size(); i++)
{
cv::Mat sharpMat8U;
cv::Mat sharpMat;
cv::Mat blurMat;
// 高斯平滑
cv::GaussianBlur(rgb[i], blurMat, cv::Size(3, 3), 0, 0);
// 计算拉普拉斯
cv::Laplacian(blurMat, sharpMat, CV_16S);
// 转换类型
sharpMat.convertTo(sharpMat8U, CV_8U);
cv::add(rgb[i], sharpMat8U, rgb[i]);
}
cv::merge(rgb, dstImg);
} 形态学——膨胀腐蚀
erode(hu_dst, hu_dst, getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1)));
dilate(hu_dst, hu_dst, getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1)));图像分割
图像分割——OTSU阈值
//otsu阈值自动求取
double getThreshVal_Otsu(const cv::Mat& _src)
{
cv::Size size = _src.size();
if (_src.isContinuous())
{
size.width *= size.height;
size.height = 1;
}
const int N = 256;
int i, j, h[N] = { 0 };
for (i = 0; i < size.height; i++)
{
const uchar* src = _src.data + _src.step*i;
for (j = 0; j <= size.width - 4; j += 4)
{
int v0 = src[j], v1 = src[j + 1];
h[v0]++; h[v1]++;
v0 = src[j + 2]; v1 = src[j + 3];
h[v0]++; h[v1]++;
}
for (; j < size.width; j++)
h[src[j]]++;
}
double mu = 0, scale = 1. / (size.width*size.height);
for (i = 0; i < N; i++)
mu += i*h[i];
mu *= scale;
double mu1 = 0, q1 = 0;
double max_sigma = 0, max_val = 0;
for (i = 0; i < N; i++)
{
double p_i, q2, mu2, sigma;
p_i = h[i] * scale;
mu1 *= q1;
q1 += p_i;
q2 = 1. - q1;
if (std::min(q1, q2) < FLT_EPSILON || std::max(q1, q2) > 1. - FLT_EPSILON)
continue;
mu1 = (mu1 + i*p_i) / q1;
mu2 = (mu - q1*mu1) / q2;
sigma = q1*q2*(mu1 - mu2)*(mu1 - mu2);
if (sigma > max_sigma)
{
max_sigma = sigma;
max_val = i;
}
}
return max_val;
}图像分割——Kmeans
Mat Image_Kmeans(Mat src, int n)
{
int width = src.cols;
int height = src.rows;
int dims = src.channels();
// 初始化定义
int sampleCount = width*height;
int clusterCount = n;//分几类
Mat points(sampleCount, dims, CV_32F, Scalar(10));
Mat labels;
Mat centers(clusterCount, 1, points.type());
// 图像RGB到数据集转换
int index = 0;
for (int row = 0; row < height; row++) {
for (int col = 0; col < width; col++) {
index = row*width + col;
Vec3b rgb = src.at(row, col);
points.at(index, 0) = static_cast(rgb[0]);
points.at(index, 1) = static_cast(rgb[1]);
points.at(index, 2) = static_cast(rgb[2]);
}
}
// 运行K-Means数据分类
TermCriteria criteria = TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 10, 1.0);
kmeans(points, clusterCount, labels, criteria, 3, KMEANS_PP_CENTERS, centers);
// 显示图像分割结果
Mat result = Mat::zeros(src.size(), CV_8UC3);
for (int row = 0; row < height; row++) {
for (int col = 0; col < width; col++) {
index = row*width + col;
int label = labels.at(index, 0);
if (label == 1) {
result.at(row, col)[0] = 255;
result.at(row, col)[1] = 0;
result.at(row, col)[2] = 0;
}
else if (label == 2){
result.at(row, col)[0] = 0;
result.at(row, col)[1] = 255;
result.at(row, col)[2] = 0;
}
else if (label == 3) {
result.at(row, col)[0] = 0;
result.at(row, col)[1] = 0;
result.at(row, col)[2] = 255;
}
else if (label == 0) {
result.at(row, col)[0] = 0;
result.at(row, col)[1] = 255;
result.at(row, col)[2] = 255;
}
}
}
return result;
} 图像滤波
多种滤波器
https://blog.csdn.net/zoucharming/article/details/70197863
在图像处理中,尽可能消除图片中的噪声,消除噪声就需要用到滤波,在本次opencv学习中,学习了三个滤波方式。
(1)平均滤波,就是将一个区域内的像素值求和取平均值,然后用这个平均值替换区域中心的像素值。
blur(源Mat对象,目标Mat对象,Size对象,Point对象)//Size对象用来确定区域大小,Point对象如果x,y都是-1则表示更新区域中心的像素。
(2)高斯滤波,也是将一个区域的像素值求取平均值替换区域中心的像素值,但是是加权平均,权重按照二维正态分布。
GaussianBlur(源Mat对象,目标Mat对象,Size对象,x方向正太分布参数,y方向正太分布参数)
(3)中值滤波,之前的两个滤波都有个问题,如果区域中有极端值,很可能影响滤波效果,中值滤波采用区域中的中值来替换,有利于克服椒盐噪声。
medianBlur(源Mat对象,目标Mat对象,int size)//这里的size表示正方形区域的边长
(4)双边滤波,之前的滤波还有个问题,他们都会把轮廓给模糊了,有一些区域之间相差较大的像素,这往往能看出轮廓,所以如果我们给个限制范围,如果两点间的像素值差距大于这个范围就不滤波了,保留图像轮廓
bilateralFilter(源Mat对象,目标Mat对象,int 区域半径,int 限制范围,int space)//space是当区域半径给的是0时,用来计算区域范围的,一般情况下没用,随便给个数就行。
#include
#include
#include
#include
using namespace std;
using namespace cv;
int main()
{
Mat src;
src = imread("1.jpg", 1);
if (src.empty())
{
printf("cannot load!!\n");
return -1;
}
namedWindow("原图");
imshow("原图", src);
Mat dst,dst1;
blur(src, dst, Size(3, 3), Point(-1, -1));
namedWindow("均值滤波");
imshow("均值滤波", dst);
GaussianBlur(src, dst, Size(5, 5), 5, 5);
namedWindow("高斯滤波");
imshow("高斯滤波", dst);
medianBlur(src, dst, 5);
namedWindow("中值滤波");
imshow("中值滤波", dst);
bilateralFilter(src, dst, 5, 100, 3);
namedWindow("双边滤波");
imshow("双边滤波", dst);
waitKey(0);
return 0;
}
轮廓
findContours
Mat grayImage;//输入处理后的二值图
vector> contours;
vector hierarchy;
Mat showImage = Mat::zeros(grayImage.size(), CV_32SC1);
Mat showedge = Mat::zeros(grayImage.size(), CV_8UC1);
findContours(grayImage, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(-1, -1)); drawContours
drawContours(要绘制的图、所有轮廓容器、轮廓编号、颜色填充、线宽);
for (size_t i = 0; i < contours.size(); i++)
{
//这里static_cast(i+1)是为了分水岭的标记不同,区域1、2、3。。。。这样才能分割
drawContours(showImage, contours, static_cast(i), Scalar::all(static_cast(i + 1)), 2);//指定要绘制轮廓的编号
} boundingRect
// 矩形边框 boundingRect
Rect rect = boundingRect(Mat(contours[i]));
rectangle(edge_dst_, rect, Scalar(theRNG().uniform(0, 255), theRNG().uniform(0, 255), theRNG().uniform(0, 255)), 3);minAreaRect
//最小外接边框
RotatedRect box = minAreaRect(Mat(contours[i])); //计算每个轮廓最小外接矩形
Point2f rect[4];
box.points(rect); //把最小外接矩形四个端点复制给rect数组
float angle = box.angle;
for (int j = 0; j<4; j++)
{
line(edge_dst_, rect[j], rect[(j + 1) % 4], Scalar(1), 2, 8); //绘制最小外接矩形每条边
}轮廓子程序
#include
#include
#include
#include
using namespace cv;
using namespace std;
void sear_contours(Mat src, Mat dst)
{
//转换为灰度图并平滑滤波
cvtColor(src, src, COLOR_BGR2GRAY);
// 找—— findContours
vector> contours;
vector hierarchy;
findContours(src, contours, hierarchy, 2, 2);
// 画—— drawContours
dst = Mat::zeros(src.size(), CV_8UC3);
for (int i = 0; i < hierarchy.size(); i++)
{
drawContours(dst, contours, i, Scalar(255, 255, 255), -1, 1, hierarchy);
drawContours(dst, contours, i, Scalar(0, 0, 0), 10, 1, hierarchy);//比实际范围变小,防止边界影响检测
}
// 矩—— 最小外接边框 minAreaRect
for (size_t i = 0; i < hierarchy.size(); i++)
{
RotatedRect box = minAreaRect(Mat(contours[i])); //计算每个轮廓最小外接矩形
Point2f rect[4];
box.points(rect); //把最小外接矩形四个端点复制给rect数组
float angle = box.angle;
for (int j = 0; j<4; j++)
{
line(dst, rect[j], rect[(j + 1) % 4], Scalar(rand() % 255, rand() % 255, rand() % 255), 2, 8); //绘制最小外接矩形每条边
}
}
// 矩—— 矩形边框 boundingRect
for (size_t i = 0; i < hierarchy.size(); i++)
{
Rect rect = boundingRect(Mat(contours[i]));
rectangle(dst, rect, Scalar(theRNG().uniform(0, 255), theRNG().uniform(0, 255), theRNG().uniform(0, 255)), 3);
}
} // 图像增强——边缘增强
// 高斯平滑
cv::GaussianBlur(dst, dst, cv::Size(3, 3), 0, 0);
// 图像增强——伽马变换
Mat imageGamma(dst.size(), CV_32FC3);
for (int i = 0; i < dst.rows; i++)
{
for (int j = 0; j < dst.cols; j++)
{
imageGamma.at(i, j)[0] = (dst.at(i, j)[0])*(dst.at(i, j)[0])*(dst.at(i, j)[0]);
imageGamma.at(i, j)[1] = (dst.at(i, j)[1])*(dst.at(i, j)[1])*(dst.at(i, j)[1]);
imageGamma.at(i, j)[2] = (dst.at(i, j)[2])*(dst.at(i, j)[2])*(dst.at(i, j)[2]);
}
}
//归一化到0~255
normalize(imageGamma, imageGamma, 0, 255, CV_MINMAX);
//转换成8bit图像显示
convertScaleAbs(imageGamma, imageGamma);
//imshow("原图", image);
//imshow("伽马变换图像增强效果", imageGamma);
dst = imageGamma; // 图像增强——边缘增强
// 高斯平滑
//cv::GaussianBlur(dst, dst, cv::Size(3, 3), 0, 0);
Mat temp;
GaussianBlur(dst, temp, Size(3, 3), 1.6, 1.6);
int r = 3;
Mat diff = dst + r*(dst - temp); //高反差保留算法
// 图像增强——伽马变换
Mat imageGamma(dst.size(), CV_32FC3);
for (int i = 0; i < dst.rows; i++)
{
for (int j = 0; j < dst.cols; j++)
{
imageGamma.at(i, j)[0] = (dst.at(i, j)[0])*(dst.at(i, j)[0])*(dst.at(i, j)[0]);
imageGamma.at(i, j)[1] = (dst.at(i, j)[1])*(dst.at(i, j)[1])*(dst.at(i, j)[1]);
imageGamma.at(i, j)[2] = (dst.at(i, j)[2])*(dst.at(i, j)[2])*(dst.at(i, j)[2]);
}
}
//归一化到0~255
normalize(imageGamma, imageGamma, 0, 255, CV_MINMAX);
//转换成8bit图像显示
convertScaleAbs(imageGamma, imageGamma);
//imshow("原图", image);
//imshow("伽马变换图像增强效果", imageGamma);
dst = imageGamma; 图像特征提取思路
颜色:白平衡——同态滤波——亮度归一
纹理:差分高通滤波器——直方图均衡化——纹理加强
矩:仿射原理
ATL::CImage读取图片
#include //ATL
#include
using namespace std;
// 图片读取\保存
void test()
{
ATL::CImage Image;
Image.Load(_T("条纹1.bmp"));
if (Image.IsNull())
{
cout << "没加载成功" << endl;
}
else
{
cout << "读取成功" << endl;
Image.Save(_T("image1.bmp"));
cout << "通道(int):" << Image.GetBPP() / 8 << endl;
cout << "宽(int):" << Image.GetWidth() << endl;
cout << "高(int)" << Image.GetHeight() << endl;
cout << "每行字节数(int):" << Image.GetPitch() << endl;
}
} ATL::CImage转Mat
//CImage 转 Mat
void CImage2Mat(CImage& Image, Mat& src)
{
// CImage 转 Mat
if (Image.IsNull())
{
cout << "没加载成功" << endl;
//MessageBox(_T("没有加载成功"));
}
if (1 == Image.GetBPP() / 8)
{
src.create(Image.GetHeight(), Image.GetWidth(), CV_8UC1);
}
else if (3 == Image.GetBPP() / 8)
{
src.create(Image.GetHeight(), Image.GetWidth(), CV_8UC3);
}
//拷贝数据
uchar* pucRow; //指向 Mat 数据区的行指针
uchar* pucImage = (uchar*)Image.GetBits(); //指向 CImage 数据区的指针
int nStep = Image.GetPitch();//每行的字节数,注意这个返回值有正有负
for (int nRow = 0; nRow < Image.GetHeight(); nRow++)
{
pucRow = (src.ptr(nRow));
for (int nCol = 0; nCol < Image.GetWidth(); nCol++)
{
if (1 == Image.GetBPP() / 8)
{
pucRow[nCol] = *(pucImage + nRow * nStep + nCol);
}
else if (3 == Image.GetBPP() / 8)
{
for (int nCha = 0; nCha < 3; nCha++)
{
pucRow[nCol * 3 + nCha] = *(pucImage + nRow * nStep + nCol * 3 + nCha);
}
}
}
}
} C++ 图像处理——滤波
#include
#include
#include
#include
#include
using namespace cv;
using namespace std;
/*
边缘突出
用高通——拉普拉斯
锐化处理
去噪点
用低通——均值、中值
偏色问题解决
用白平衡进行处理
【空域与频域之间是有一定关系。均值滤波器是一种低通滤波;拉普拉斯算子滤波(边缘检测)是一种高通滤波】
*/
class Blur_Class
{
public:
/*
双边滤波——保留纹理的滤波
三通道图,返回三通道图
Shuangbian_Bialteral_Filter(src, src);
*/
void Shuangbian_Bialteral_Filter(Mat src, Mat dst, int R = 10, double sigmaC = 20, double sigmaS = 20);
/*
高分差滤波——类似锐化增加噪声点
三通道图,返回三通道图
HighPass(src, dst);
*/
void HighPass(Mat src, Mat dst, int r = 3, int k = 3);
/*
LOG变换——使整体图片亮度均衡(强度大)
三通道图,返回三通道图
log_Filter(src, src);
*/
void log_Filter(Mat src, Mat dst);
/*
均衡化——一定程度上亮度均衡,增强边缘强度
输入单通道、三通道
junheng_equalizeHist(src, src);
*/
void junheng_equalizeHist(Mat src, Mat dst);
/*
中值滤波——可以去除多个零散密集的噪声点
输入单通道、三通道图
zhongzhi_Median_Filter(src, src);
*/
void zhongzhi_Median_Filter(Mat src, Mat dst, int k = 10);
/*
膨胀腐蚀——默认膨胀
输入单通道、三通道
PF_Filter(src, dst);
*/
void PF_Filter(Mat src, Mat dst, bool flag = true, int k = 1);
/*
自己定义卷积核
0 -1 0
-1 5 -1
0 -1 0
filter(dst2, dst2)
*/
void filter(Mat src, Mat dst, Mat kerne = (Mat_(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0));
public:
/* RGB分离 */
void RGB_Split(Mat src, Mat r = Mat(), Mat g = Mat(), Mat b = Mat(), Mat R = Mat(), Mat G = Mat(), Mat B = Mat());
/*白平衡*/
void baipingheng(Mat src, Mat dst);
public:
/*
lab
*/
void RGB2LAB(Mat& rgb, Mat& Lab);
/*
偏色检验
*/
float colorCheck(const Mat& imgLab);
};
/*——————————————————————————————————————————————————————————————*/
/*
双边滤波——保留纹理的滤波
三通道图,返回三通道图
Shuangbian_Bialteral_Filter(src, src);
*/
void Blur_Class::Shuangbian_Bialteral_Filter(Mat src, Mat dst, int R, double sigmaC, double sigmaS)
{
Mat dst_;
bilateralFilter(src, dst_, R, sigmaC, sigmaS);
dst_.copyTo(dst);
}
/*
高反差滤波——类似锐化增加噪声点——叠加边缘后的效果图 = 原图 + r*(原图-滤波)
三通道图,返回三通道图
HighPass(src, dst);
*/
void Blur_Class::HighPass(Mat src, Mat dst, int r, int k)
{
Mat temp;
int n = 2 * k + 1;
Size ksize = Size(n, n);
GaussianBlur(src, temp, ksize, 1.6, 1.6);
Mat diff = src + r*(src - temp); //高反差保留算法
diff.copyTo(dst);
}
/*
LOG变换——使整体图片亮度均衡(强度大)
三通道图,返回三通道图
log_Filter(src, src);
*/
void Blur_Class::log_Filter(Mat src, Mat dst)
{
Mat imageLog(src.size(), CV_32FC3);
for (int i = 0; i < src.rows; i++)
{
for (int j = 0; j < src.cols; j++)
{
imageLog.at(i, j)[0] = log(1 + src.at(i, j)[0]);
imageLog.at(i, j)[1] = log(1 + src.at(i, j)[1]);
imageLog.at(i, j)[2] = log(1 + src.at(i, j)[2]);
}
}
//归一化到0~255
normalize(imageLog, imageLog, 0, 255, CV_MINMAX);
//转换成8bit图像显示
convertScaleAbs(imageLog, imageLog);
imageLog.copyTo(dst);
}
/*
均衡化——一定程度上亮度均衡,增强边缘强度
输入单通道、三通道
junheng_equalizeHist(src, src);
*/
void Blur_Class::junheng_equalizeHist(Mat src, Mat dst)
{
if (src.channels() == 3)
{
dst.create(src.size(), src.type());
Mat imageRGB[3];
split(src, imageRGB);
for (int i = 0; i < 3; i++)
{
equalizeHist(imageRGB[i], imageRGB[i]);
}
merge(imageRGB, 3, dst);
}
else if (src.channels() == 1)
{
dst.create(src.size(), src.type());
equalizeHist(src, dst);
}
}
/*
中值滤波——可以去除多个零散密集的噪声点
输入单通道、三通道图
zhongzhi_Median_Filter(src, src);
*/
void Blur_Class::zhongzhi_Median_Filter(Mat src, Mat dst, int k)
{
int n = 2 * k + 1;
dst.create(src.size(), src.type());
medianBlur(src, dst, n);
}
/*
膨胀腐蚀——默认膨胀
输入单通道、三通道
PF_Filter(src, dst);
*/
void Blur_Class::PF_Filter(Mat src, Mat dst, bool flag, int k)
{
int n = 2 * k + 1;
Size Ksize = Size(k, k);
Mat element = getStructuringElement(MORPH_RECT, Ksize);
if (flag == true)
{
// 进行膨胀操作
dilate(src, dst, element);
}
else
{
// 进行腐蚀操作
erode(src, dst, element);
}
}
/*
自己定义卷积核
0 -1 0
-1 5 -1
0 -1 0
filter(dst2, dst2)
*/
void Blur_Class::filter(Mat src, Mat dst, Mat kerne)
{
//Mat kerne = (Mat_(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0); // 生成一个掩模核 大小为 3x3 , 通过<< 输入到矩阵Mat_ 中,然后隐式转换成Mat类型
dst.create(src.size(), src.type());
filter2D(src, dst, CV_8UC3, kerne);
}
/*
RGB
分离成r、g、b
合并成R、G、B
*/
void Blur_Class::RGB_Split(Mat src, Mat r, Mat g, Mat b, Mat R, Mat G, Mat B)
{
Mat imageRGB[3];
split(src, imageRGB);
r.create(src.size(), src.type());
g.create(src.size(), src.type());
b.create(src.size(), src.type());
b = imageRGB[0];
g = imageRGB[1];
r = imageRGB[2];
Mat black = Mat::zeros(Size(src.cols, src.rows), CV_8UC1);
vector channels_r;
channels_r.push_back(black);
channels_r.push_back(black);
channels_r.push_back(r);
merge(channels_r, R);
vector channels_g;
channels_g.push_back(black);
channels_g.push_back(g);
channels_g.push_back(black);
merge(channels_g, G);
vector channels_b;
channels_b.push_back(b);
channels_b.push_back(black);
channels_b.push_back(black);
merge(channels_b, B);
}
/*
白平衡
*/
void Blur_Class::baipingheng(Mat src, Mat dst)
{
vector imageRGB;
split(src, imageRGB);
//求原始图像的RGB分量的均值
double R, G, B;
B = mean(imageRGB[0])[0];
G = mean(imageRGB[1])[0];
R = mean(imageRGB[2])[0];
//需要调整的RGB分量的增益
double KR, KG, KB;
KB = (R + G + B) / (3 * B);
KG = (R + G + B) / (3 * G);
KR = (R + G + B) / (3 * R);
//调整RGB三个通道各自的值
imageRGB[0] = imageRGB[0] * KB;
imageRGB[1] = imageRGB[1] * KG;
imageRGB[2] = imageRGB[2] * KR;
//RGB三通道图像合并
dst.create(src.size(), src.type());
merge(imageRGB, dst);
namedWindow("白平衡调整后", 0);
imshow("白平衡调整后", dst);
waitKey();
}
/*转换成lab*/
void Blur_Class::RGB2LAB(Mat& rgb, Mat& Lab)
{
Mat XYZ(rgb.size(), rgb.type());
Mat_::iterator begainRGB = rgb.begin();
Mat_::iterator endRGB = rgb.end();
Mat_::iterator begainXYZ = XYZ.begin();
int shift = 22;
for (; begainRGB != endRGB; begainRGB++, begainXYZ++)
{
(*begainXYZ)[0] = ((*begainRGB)[0] * 199049 + (*begainRGB)[1] * 394494 + (*begainRGB)[2] * 455033 + 524288) >> (shift - 2);
(*begainXYZ)[1] = ((*begainRGB)[0] * 75675 + (*begainRGB)[1] * 749900 + (*begainRGB)[2] * 223002 + 524288) >> (shift - 2);
(*begainXYZ)[2] = ((*begainRGB)[0] * 915161 + (*begainRGB)[1] * 114795 + (*begainRGB)[2] * 18621 + 524288) >> (shift - 2);
}
int LabTab[1024];
for (int i = 0; i < 1024; i++)
{
if (i>9)
LabTab[i] = (int)(pow((float)i / 1020, 1.0F / 3) * (1 << shift) + 0.5);
else
LabTab[i] = (int)((29 * 29.0 * i / (6 * 6 * 3 * 1020) + 4.0 / 29) * (1 << shift) + 0.5);
}
const int ScaleLC = (int)(16 * 2.55 * (1 << shift) + 0.5);
const int ScaleLT = (int)(116 * 2.55 + 0.5);
const int HalfShiftValue = 524288;
begainXYZ = XYZ.begin();
Mat_::iterator endXYZ = XYZ.end();
Lab.create(rgb.size(), rgb.type());
Mat_::iterator begainLab = Lab.begin();
for (; begainXYZ != endXYZ; begainXYZ++, begainLab++)
{
int X = LabTab[(*begainXYZ)[0]];
int Y = LabTab[(*begainXYZ)[1]];
int Z = LabTab[(*begainXYZ)[2]];
int L = ((ScaleLT * Y - ScaleLC + HalfShiftValue) >> shift);
int A = ((500 * (X - Y) + HalfShiftValue) >> shift) + 128;
int B = ((200 * (Y - Z) + HalfShiftValue) >> shift) + 128;
(*begainLab)[0] = L;
(*begainLab)[1] = A;
(*begainLab)[2] = B;
}
}
/*偏色检测*/
float Blur_Class::colorCheck(const Mat& imgLab)
{
Mat_::const_iterator begainIt = imgLab.begin();
Mat_::const_iterator endIt = imgLab.end();
float aSum = 0;
float bSum = 0;
for (; begainIt != endIt; begainIt++)
{
aSum += (*begainIt)[1];
bSum += (*begainIt)[2];
}
int MN = imgLab.cols*imgLab.rows;
double Da = aSum / MN - 128; // 必须归一化到[-128,,127]范围内
double Db = bSum / MN - 128;
//平均色度
double D = sqrt(Da*Da + Db*Db);
begainIt = imgLab.begin();
double Ma = 0;
double Mb = 0;
for (; begainIt != endIt; begainIt++)
{
Ma += abs((*begainIt)[1] - 128 - Da);
Mb += abs((*begainIt)[2] - 128 - Db);
}
Ma = Ma / MN;
Mb = Mb / MN;
//色度中心距
double M = sqrt(Ma*Ma + Mb*Mb);
//偏色因子
float K = (float)(D / M);
cout << "K=" << K << endl;
return K;
}
C++ Opencv HSV
Opencv的HSV范围:

C++ Opencv 双边滤波
转:
双边滤波是一种非线性滤波器,它可以达到保持边缘、降噪平滑的效果。和其他滤波原理一样,双边滤波也是采用加权平均的方法,用周边像素亮度值的加权平均代表某个像素的强度,所用的加权平均基于高斯分布。最重要的是,双边滤波的权重不仅考虑了像素的欧氏距离(如普通的高斯低通滤波,只考虑了位置对中心像素的影响),还考虑了像素范围域中的辐射差异(例如卷积核中像素与中心像素之间相似程度、颜色强度,深度距离等),在计算中心像素的时候同时考虑这两个权重。
高斯滤波:

双边滤波:




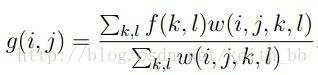
g(i, j)代表输出点;
S(i, j)的是指以(i,j)为中心的(2N+1)(2N+1)的大小的范围;
f(k, l)代表(多个)输入点;
w(i, j, k, l)代表经过两个高斯函数计算出的值(这里还不是权值)
上述公式我们进行转化,假设公式中w(i,j,k,l)为m,则有
设 m1+m2+m3 … +mn = M,则有
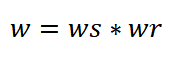
w(i, j, k, l):ws为空间临近高斯函数,wr为像素值相似度高斯函数
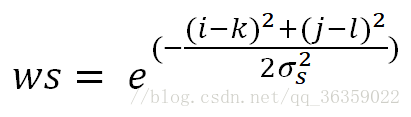

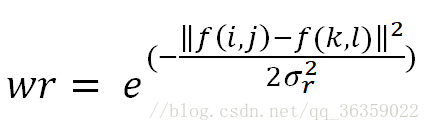


双边滤波的核函数是空间域核(空间域(spatial domain S))与像素范围域核(像素范围域(range domain R))的综合结果:在图像的平坦区域,像素值变化很小,对应的像素范围域权重接近于1,此时空间域权重起主要作用,相当于进行高斯模糊;在图像的边缘区域,像素值变化很大,像素范围域权重变大,从而保持了边缘的信息。

算法实现:
void bilateralFilter(src, dst, d, sigmaColor, sigmaSpace, BORDER_DEFAULT)
/*
. InputArray src: 输入图像,可以是Mat类型,图像必须是8位或浮点型单通道、三通道的图像。
. OutputArray dst: 输出图像,和原图像有相同的尺寸和类型。
. int d: (直径范围)表示在过滤过程中每个像素邻域的直径范围。如果这个值是非正数,则函数会从第五个参数sigmaSpace计算该值。
. double sigmaColor:(sigma颜色) 颜色空间过滤器的sigma值,这个参数的值月大,表明该像素邻域内有月宽广的颜色会被混合到一起,产生较大的半相等颜色区域。
. double sigmaSpace:(sigma空间) 坐标空间中滤波器的sigma值,如果该值较大,则意味着颜色相近的较远的像素将相互影响,从而使更大的区域中足够相似的颜色获取相同的颜色。当d>0时,d指定了邻域大小且与sigmaSpace五官,否则d正比于sigmaSpace.
. int borderType=BORDER_DEFAULT: 用于推断图像外部像素的某种边界模式,有默认值BORDER_DEFAULT.
*/
bilateralFilter(src, dst, 10, 10, 10);C++ Opencv 图像特征( Opencv3)
// 特征点
void FeatureAndCompare(cv::Mat srcImage1)
{
CV_Assert(srcImage1.data != NULL);
Mat c_src1 = srcImage1.clone();
// 转换为灰度
cv::Mat grayMat1;
cv::cvtColor(srcImage1, grayMat1, CV_RGB2GRAY);
加强
equalizeHist(grayMat1, grayMat1);
锐化
sharpenImage1(grayMat1, grayMat1);
//
cv::Ptr ptrBrisk = cv::BRISK::create();
vector kp1;
Mat des1;//descriptor
ptrBrisk->detectAndCompute(grayMat1, Mat(), kp1, des1);
Mat res1;
int drawmode = DrawMatchesFlags::DRAW_RICH_KEYPOINTS;
drawKeypoints(c_src1, kp1, res1, Scalar::all(-1), drawmode);//画出特征点
//
//std::cout << "size of description of Img1: " << kp1.size() << endl;
//
namedWindow("drawKeypoints", 0);
imshow("drawKeypoints", c_src1);
cvWaitKey(0);
} //brisk
void brisk_feature(Mat src1, Mat src2)
{
cv::cvtColor(src1, src1, CV_RGB2GRAY);
cv::cvtColor(src2, src2, CV_RGB2GRAY);
// 加强
equalizeHist(src1, src1);
equalizeHist(src2, src2);
// 锐化
//sharpenImage1(src1, src1);
//sharpenImage1(src2, src2);
Ptr brisk = BRISK::create();
vectorkeypoints1, keypoints2;
Mat descriptors1, descriptors2;
brisk->detectAndCompute(src1, Mat(), keypoints1, descriptors1);
brisk->detectAndCompute(src2, Mat(), keypoints2, descriptors2);
Mat dst1,dst2;
drawKeypoints(src1, keypoints1, dst1);
drawKeypoints(src2, keypoints2, dst2);
namedWindow("output1", 0);
imshow("output1", dst1);
waitKey();
namedWindow("output2", 0);
imshow("output2", dst2);
waitKey();
BFMatcher matcher;
vectormatches;
matcher.match(descriptors1, descriptors2, matches);
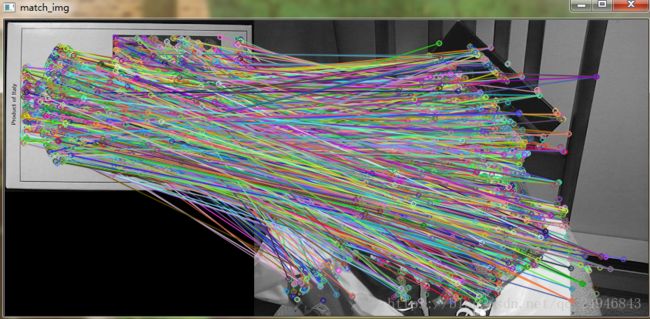
Mat match_img;
drawMatches(src1, keypoints1, src2, keypoints2, matches, match_img);
namedWindow("match_img", 0);
imshow("match_img", match_img);
double minDist = 1000;
for (int i = 0; i < descriptors1.rows; i++)
{
double dist = matches[i].distance;
if (dist < minDist)
{
minDist = dist;
}
}
printf("min distance is:%f\n", minDist);
vectorgoodMatches;
for (int i = 0; i < descriptors1.rows; i++)
{
double dist = matches[i].distance;
if (dist < max(1.8*minDist, 0.02))
{
goodMatches.push_back(matches[i]);
}
}
Mat good_match_img;
drawMatches(src1, keypoints1, src2, keypoints2, goodMatches, good_match_img, Scalar::all(-1), Scalar::all(-1), vector(), 2);
namedWindow("goodMatch", 0);
imshow("goodMatch", good_match_img);
waitKey(0);
} C++ Opencv 图像特征brisk s
#include
#include
using namespace cv;
using namespace xfeatures2d;
using namespace std;
int main(int arc, char** argv) {
Mat src1 = imread("1.png",IMREAD_GRAYSCALE);
Mat src2 = imread("2.png",IMREAD_GRAYSCALE);
namedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src1);
Ptr brisk = BRISK::create();
vectorkeypoints1, keypoints2;
Mat descriptors1, descriptors2;
brisk->detectAndCompute(src1, Mat(), keypoints1, descriptors1);
brisk->detectAndCompute(src2, Mat(), keypoints2, descriptors2);
/*Mat dst1;
drawKeypoints(src1, keypoints1, dst1);
imshow("output1", dst1);*/
BFMatcher matcher;
vectormatches;
matcher.match(descriptors1, descriptors2, matches);
Mat match_img;
drawMatches(src1, keypoints1, src2, keypoints2, matches, match_img);
imshow("match_img", match_img);
double minDist = 1000;
for (int i = 0; i < descriptors1.rows; i++)
{
double dist = matches[i].distance;
if (dist < minDist)
{
minDist = dist;
}
}
printf("min distance is:%f\n", minDist);
vectorgoodMatches;
for (int i = 0; i < descriptors1.rows; i++)
{
double dist = matches[i].distance;
if (dist < max( 1.8*minDist, 0.02))
{
goodMatches.push_back(matches[i]);
}
}
Mat good_match_img;
drawMatches(src1, keypoints1, src2, keypoints2, goodMatches, good_match_img, Scalar::all(-1), Scalar::all(-1), vector(), 2);
imshow("goodMatch", good_match_img);
vectorsrc1GoodPoints, src2GoodPoints;
for (int i = 0; i < goodMatches.size(); i++)
{
src1GoodPoints.push_back(keypoints1[goodMatches[i].queryIdx].pt);
src2GoodPoints.push_back(keypoints2[goodMatches[i].trainIdx].pt);
}
Mat P = findHomography(src1GoodPoints, src2GoodPoints, RANSAC);
vector src1corner(4);
vector src2corner(4);
src1corner[0] = Point(0, 0);
src1corner[1] = Point(src1.cols, 0);
src1corner[2] = Point(src1.cols, src1.rows);
src1corner[3] = Point(0, src1.rows);
perspectiveTransform(src1corner, src2corner, P);
line(good_match_img, src2corner[0] + Point2f(src1.cols, 0), src2corner[1] + Point2f(src1.cols, 0), Scalar(0, 0, 255), 2);
line(good_match_img, src2corner[1] + Point2f(src1.cols, 0), src2corner[2] + Point2f(src1.cols, 0), Scalar(0, 0, 255), 2);
line(good_match_img, src2corner[2] + Point2f(src1.cols, 0), src2corner[3] + Point2f(src1.cols, 0), Scalar(0, 0, 255), 2);
line(good_match_img, src2corner[3] + Point2f(src1.cols, 0), src2corner[0] + Point2f(src1.cols, 0), Scalar(0, 0, 255), 2);
imshow("result", good_match_img);
waitKey(0);
return 0;
}


C++ Opencv hog+svm
思路:
// HOG描述子向量
std::vector descriptors;
cv::HOGDescriptor hog(cv::Size(48, 48), cv::Size(16, 16), cv::Size(8, 8), cv::Size(8, 8), 9);
hog.compute(src, descriptors, cv::Size(8, 8));
int DescriptorDim = descriptors.size();
// SVM 样本+标签
int num;
Mat sampleFeatureMat = cv::Mat::zeros(num, DescriptorDim, CV_32FC1);
int i, j;//i为样本序列,j为样本特征值
sampleFeatureMat.at(i, j) = descriptors[j];
Mat sampleLabelMat;
int label;
sampleLabelMat.at(i, 0) = label; C++ Opencv 颜色、纹理、形状+svm
主函数
#include
#include
#include
#include
#include
#include "Water_Cut.h"
#include "Feature.h"
using namespace cv;
using namespace std;
using namespace cv::ml;
Feature feature_class;
int main()
{
// 训练——训练时候关闭测试
#if 0
// 遍历图片——为了循环提取特征用
string train_img_dir = "C:\\Users\\Administrator\\Desktop\\样品\\训练";
string train_img_namehead = "test";
string train_img_type = "bmp";
//size_t train_img_num = 4;
string img_name = train_img_dir + "\\" + "*." + train_img_type; //cout << img_name << endl;
int train_img_num = feature_class.read_images_in_folder(img_name);
cout << "训练图个数:" << train_img_num << endl;
// 训练用的输入和标签
Mat trainmat;
trainmat = cv::Mat::zeros(train_img_num, 32, CV_32FC1);
Mat labelmat;
labelmat = cv::Mat::zeros(train_img_num, 1, CV_32SC1);
// 遍历图并提取特征
vector train_img = feature_class.data_search(train_img_dir, train_img_namehead, train_img_type, train_img_num);
for (size_t i = 0; i < train_img_num; i++)
{
resize(train_img[i], train_img[i], Size(train_img[i].cols / 2, train_img[i].rows / 2));
namedWindow("vetmat", 0);
imshow("vetmat", train_img[i]);//train_img[i].clone();
waitKey(0);
// 图像分割
Mat src = train_img[i].clone();
Mat dst = Mat::zeros(train_img[i].size(), CV_8UC3);
Mat edge = Mat::zeros(train_img[i].size(), CV_8UC3);
Water_Cut(src, dst, edge);
// 图像特征_HU
Mat hu_dst = dst.clone();
double Hu[7] = { 0 };
feature_class.feature_hu(hu_dst, Hu);
// 图像特征_COLOR
Mat color_dst = dst.clone();
float Mom[9] = { 0 };
feature_class.feature_color(color_dst, Mom);
// 图像特征_GLCM
Mat glcm_dst = dst.clone();
cv::cvtColor(glcm_dst, glcm_dst, CV_RGB2GRAY);
float glcm_data[16] = { 0 };
feature_class.feature_glcm(glcm_dst, glcm_data);
float train_data[32] = { 0 };
for (size_t j = 0; j < 7; j++)
{
train_data[j] = (float)Hu[j];
}
for (size_t j = 0; j < 9; j++)
{
train_data[7 + j] = (float)Mom[j];
}
for (size_t j = 0; j < 16; j++)
{
train_data[16 + j] = (float)glcm_data[j];
}
vector traindata; // 特征值——一类(一张图)的特征
for (size_t k = 0; k < 32; k++)
{
traindata.push_back(train_data[k]);
}
std::cout << "traindata size:";
std::cout << traindata.size() << endl;
for (size_t j = 0; j < traindata.size(); j++)
{
trainmat.at(i, j) = traindata[j];
}
labelmat.at(i, 0) = i + 1; //每张一类
}
// 训练的初始化
Ptr svm = SVM::create();
svm->setType(SVM::C_SVC);
svm->setKernel(SVM::LINEAR);
svm->setTermCriteria(TermCriteria(TermCriteria::MAX_ITER, 100, 1e-6));
std::cout << "开始训练" << endl;
svm->train(trainmat, ROW_SAMPLE, labelmat);
std::cout << "开始结束" << endl;
svm->save("svm.xml");
#endif
// 测试——测试时候关闭训练
#if 1
// 遍历测试文件
// 遍历图片——为了循环提取特征用
//string test_img_dir = "C:\\Users\\Administrator\\Desktop\\样品\\测试\\方格1号";
//string test_img_dir = "C:\\Users\\Administrator\\Desktop\\样品\\测试\\花纹2号";
//string test_img_dir = "C:\\Users\\Administrator\\Desktop\\样品\\测试\\空纹理3号";
//string test_img_dir = "C:\\Users\\Administrator\\Desktop\\样品\\测试\\条纹4号";
string test_img_dir = "C:\\Users\\Administrator\\Desktop\\样品\\测试\\";
string test_img_namehead = "test";
string test_img_type = "bmp";
string img_name = test_img_dir + "\\" + "*." + test_img_type; //cout << img_name << endl;
int test_img_num = feature_class.read_images_in_folder(img_name);
std::cout << "测试图个数:" << test_img_num << endl;
// 训练用的输入和标签
Mat testmat;
testmat = cv::Mat::zeros(test_img_num, 32, CV_32F);
// 遍历图并提取特征
vector test_img = feature_class.data_search(test_img_dir, test_img_namehead, test_img_type, test_img_num);
for (size_t i = 0; i < test_img_num; i++)
{
resize(test_img[i], test_img[i], Size(test_img[i].cols / 2, test_img[i].rows / 2));
cv::namedWindow("vetmat", 0);
cv::imshow("vetmat", test_img[i]);//test_img[i].clone();
// 图像分割
Mat src = test_img[i].clone();
Mat dst = Mat::zeros(test_img[i].size(), CV_8UC3);
Mat edge = Mat::zeros(test_img[i].size(), CV_8UC3);
Water_Cut(src, dst, edge);
// 图像特征_HU
Mat hu_dst = dst.clone();
double Hu[7] = { 0 };
feature_class.feature_hu(hu_dst, Hu);
// 图像特征_COLOR
Mat color_dst = dst.clone();
float Mom[9] = { 0 };
feature_class.feature_color(color_dst, Mom);
// 图像特征_GLCM
Mat glcm_dst = dst.clone();
cv::cvtColor(glcm_dst, glcm_dst, CV_RGB2GRAY);
float glcm_data[16] = { 0 };
feature_class.feature_glcm(glcm_dst, glcm_data);
cv::waitKey();
float test_data[32] = { 0 };
for (size_t j = 0; j < 7; j++)
{
test_data[j] = (float)Hu[j];
}
for (size_t j = 0; j < 9; j++)
{
test_data[7 + j] = (float)Mom[j];
}
for (size_t j = 0; j < 16; j++)
{
test_data[16 + j] = (float)glcm_data[j];
}
vector testdata; // 特征值——一类(一张图)的特征
for (size_t k = 0; k < 32; k++)
{
testdata.push_back(test_data[k]);
}
std::cout << "testdata size:";
std::cout << testdata.size() << endl;
for (size_t j = 0; j < testdata.size(); j++)
{
testmat.at(i, j) = testdata[j];
}
}
Ptr svmtest = Algorithm::load("svm.xml"); // SVM::load()是一个静态函数,不能单独用
Mat result;
float temp = svmtest->predict(testmat, result);
std::cout << "分类结果" << endl;
std::cout << result << endl;
for (size_t i = 0; i < test_img_num; i++)
{
int a = result.at(i, 0).x;
std::cout << "最终分类为:" << "第" << a << "号瓷砖" << endl;
}
#endif
system("pause");
return 0;
} 子程序
#include
#include
#include
#include "time.h"
using namespace cv;
using namespace std;
using namespace cv::ml;
class Feature
{
public:
/*
第一步:建立类
#include
#include
#include
#include "time.h"
using namespace cv;
using namespace std;
第二步:包含类
Feature feature_class;
第三步:
集合颜色+形状+纹理
// 图像特征_HU
Mat hu_dst = dst.clone();
double Hu[7] = { 0 };
feature_class.feature_hu(hu_dst, Hu);
// 图像特征_COLOR
Mat color_dst = dst.clone();
float Mom[9] = { 0 };
feature_class.feature_color(color_dst, Mom);
// 图像特征_GLCM
Mat glcm_dst = dst.clone();
cv::cvtColor(glcm_dst, glcm_dst, CV_RGB2GRAY);
float glcm_data[16] = { 0 };
feature_class.feature_glcm(glcm_dst, glcm_data);
第四步:
// 特征集合7+9+16
float test_data[32] = { 0 };
for (size_t j = 0; j < 7; j++)
{
test_data[j] = (float)Hu[j];
}
for (size_t j = 0; j < 9; j++)
{
test_data[7 + j] = (float)Mom[j];
}
for (size_t j = 0; j < 16; j++)
{
test_data[16 + j] = (float)glcm_data[j];
}
*/
/* 【颜色】 */
// 颜色 计算三阶矩
double calc3orderMom(Mat &channel) //计算三阶矩
{
uchar *p;
double mom = 0;
double m = mean(channel)[0]; //计算单通道图像的均值
int nRows = channel.rows;
int nCols = channel.cols;
if (channel.isContinuous()) //连续存储有助于提升图像扫描速度
{
nCols *= nRows;
nRows = 1;
}
for (int i = 0; i < nRows; i++) //计算立方和
{
p = channel.ptr(i);
for (int j = 0; j < nCols; j++)
mom += pow((p[j] - m), 3);
}
float temp;
temp = cvCbrt((float)(mom / (nRows*nCols))); //求均值的立方根
mom = (double)temp;
return mom;
}
// 颜色 计算9个颜色矩:3个通道的1、2、3阶矩
double *colorMom(Mat &img)
{
double *Mom = new double[9]; //存放9个颜色矩
if (img.channels() != 3)
std::cout << "Error,input image must be a color image" << endl;
Mat b(img.rows, img.cols, CV_8U);
Mat r(img.rows, img.cols, CV_8U);
Mat g(img.rows, img.cols, CV_8U);
Mat channels[] = { b, g, r };
split(img, channels);
//cv::imshow("r", channels[0]);
//cv::imshow("g", channels[1]);
//cv::imshow("b", channels[2]);
//waitKey(0);
Mat tmp_m, tmp_sd;
//计算b通道的颜色矩
meanStdDev(b, tmp_m, tmp_sd);
Mom[0] = tmp_m.at(0, 0);
Mom[3] = tmp_sd.at(0, 0);
Mom[6] = calc3orderMom(b);
// cout << Mom[0] << " " << Mom[1] << " " << Mom[2] << " " << endl;
//计算g通道的颜色矩
meanStdDev(g, tmp_m, tmp_sd);
Mom[1] = tmp_m.at(0, 0);
Mom[4] = tmp_sd.at(0, 0);
Mom[7] = calc3orderMom(g);
// cout << Mom[3] << " " << Mom[4] << " " << Mom[5] << " " << endl;
//计算r通道的颜色矩
meanStdDev(r, tmp_m, tmp_sd);
Mom[2] = tmp_m.at(0, 0);
Mom[5] = tmp_sd.at(0, 0);
Mom[8] = calc3orderMom(r);
// cout << Mom[6] << " " << Mom[7] << " " << Mom[8] << " " << endl;
return Mom;//返回颜色矩数组
}
// 颜色
bool feature_color(Mat src, float Mom[9])
{
if (src.channels() == 3)
{
// 图像特征_COLOR
Mat color_dst = src.clone();
cv::cvtColor(color_dst, color_dst, CV_RGB2HSV);
double *MOM;
MOM = colorMom(color_dst);
for (int i = 0; i < 9; i++)
{
std::cout << (float)MOM[i] << endl;
Mom[i] = (float)MOM[i];
}
return true;
}
else
{
std::cout << "channels!=3";
return false;
}
}
/* 【形状】 */
bool feature_hu(Mat src, double Hu[7])
{
if (src.channels() == 3)
{
// 图像特征_HU
Mat hu_dst = src.clone();
cv::cvtColor(hu_dst, hu_dst, CV_RGB2GRAY);
Canny(hu_dst, hu_dst, 0, 120);
//double Hu[7]; //存储得到的Hu矩阵
Moments mo = moments(hu_dst);//矩变量
HuMoments(mo, Hu);
for (int i = 0; i < 7; i++)
{
std::cout << (float)Hu[i] << endl;
}
return true;
}
else if ((src.channels() == 1))
{
Mat hu_dst = src.clone();
Canny(hu_dst, hu_dst, 0, 120);
//double Hu[7]; //存储得到的Hu矩阵
Moments mo = moments(hu_dst);//矩变量
HuMoments(mo, Hu);
for (int i = 0; i < 7; i++)
{
std::cout << (float)Hu[i] << endl;
}
return true;
}
else
{
return false;
}
}
// 纹理
const int gray_level = 16;//纹理区域块的大小,通常将图像划分成若干个纹理块计算
vector glamvalue;//全局变量
//【】第一步:j计算共生矩阵
void getglcm_0(Mat& input, Mat& dst)//0度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)//寻找像素灰度最大值
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;//像素灰度最大值加1即为该矩阵所拥有的灰度级数
if (max_gray_level > 16)//若灰度级数大于16,则将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
else//若灰度级数小于16,则生成相应的灰度共生矩阵
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
}
void getglcm_45(Mat& input, Mat& dst)//45度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;
if (max_gray_level > 16)
{
for (int i = 0; i < height; i++)//将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
else
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
}
void getglcm_90(Mat& input, Mat& dst)//90度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;
if (max_gray_level > 16)
{
for (int i = 0; i < height; i++)//将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j];
dst.ptr(rows)[cols]++;
}
}
}
else
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j];
dst.ptr(rows)[cols]++;
}
}
}
}
void getglcm_135(Mat& input, Mat& dst)//135度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;
if (max_gray_level > 16)
{
for (int i = 0; i < height; i++)//将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 1; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j - 1];
dst.ptr(rows)[cols]++;
}
}
}
else
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 1; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j - 1];
dst.ptr(rows)[cols]++;
}
}
}
}
// 【】第二步:计算纹理特征 // 特征值计算—— double& Asm, double& Con, double& Ent, double& Idm
void feature_computer(Mat&src, float& Asm, float& Con, float& Ent, float& Idm)//计算特征值
{
int height = src.rows;
int width = src.cols;
int total = 0;
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
total += srcdata[j];//求图像所有像素的灰度值的和
}
}
Mat copy;
copy.create(height, width, CV_64FC1);
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
float*copydata = copy.ptr(i);
for (int j = 0; j < width; j++)
{
copydata[j] = (float)srcdata[j] / (float)total;//图像每一个像素的的值除以像素总和
}
}
for (int i = 0; i < height; i++)
{
float*srcdata = copy.ptr(i);
for (int j = 0; j < width; j++)
{
Asm += srcdata[j] * srcdata[j]; //能量
if (srcdata[j]>0)
{
Ent -= srcdata[j] * log(srcdata[j]); //熵
}
Con += (float)(i - j)*(float)(i - j)*srcdata[j]; //对比度
Idm += srcdata[j] / (1 + (float)(i - j)*(float)(i - j)); //逆差矩
}
}
}
// 【】融合第一、二步
/*
Mat src_gray;
float data[16] = {0};
*/
void feature_glcm(Mat src_gray, float data[16])
{
Mat dst_0, dst_90, dst_45, dst_135;
getglcm_0(src_gray, dst_0);
float asm_0 = 0, con_0 = 0, ent_0 = 0, idm_0 = 0;
feature_computer(dst_0, asm_0, con_0, ent_0, idm_0);
getglcm_45(src_gray, dst_45);
float asm_45 = 0, con_45 = 0, ent_45 = 0, idm_45 = 0;
feature_computer(dst_45, asm_45, con_45, ent_45, idm_45);
getglcm_90(src_gray, dst_90);
float asm_90 = 0, con_90 = 0, ent_90 = 0, idm_90 = 0;
feature_computer(dst_90, asm_90, con_90, ent_90, idm_90);
getglcm_135(src_gray, dst_135);
float asm_135 = 0, con_135 = 0, ent_135 = 0, idm_135 = 0;
feature_computer(dst_135, asm_135, con_135, ent_135, idm_135);
float AMS[4] = { asm_0, asm_45, asm_90, asm_135 };
float COM[4] = { con_0, con_45, con_90, con_135 };
float ENT[4] = { ent_0, ent_45, ent_90, ent_135 };
float IDM[4] = { idm_0, idm_45, idm_90, idm_135 };
float glcm_data[16] = {
asm_0, asm_45, asm_90, asm_135,
con_0, con_45, con_90, con_135,
ent_0, ent_45, ent_90, ent_135,
idm_0, idm_45, idm_90, idm_135
};
/*std::cout << "特征数据:" << endl;*/
for (size_t i = 0; i < 16; i++)
{
data[i] = glcm_data[i];
//std::cout << data[i] << " ";
}
}
// 读取当前文件夹图片的个数子程序
/*
cv::String pattern = "./save/*.bmp";
int cout = read_images_in_folder(pattern);
*/
size_t read_images_in_folder(cv::String pattern)//读取当前指定目录的图片的个数
{
vector fn;
glob(pattern, fn, false);//OpenCV自带一个函数glob()可以遍历文件
size_t count = fn.size(); //number of png files in images folder
return count;
}
// 【】文件检索
/*
string train_img_dir = "C:\\Users\\Administrator\\Desktop\\样品\\训练";
string train_img_namehead = "test";
string train_img_type = "bmp";
size_t train_img_num = 4;
vector train_img = data_search(train_img_dir, train_img_namehead, train_img_type, train_img_num);
for (size_t i = 0; i < train_img_num; i++)
{
namedWindow("vetmat", 0);
imshow("vetmat", train_img[i]);
waitKey(0);
}
*/
vector data_search(string &img_dir, string &img_namehead, string &img_type, size_t n)
{
float train_data[4][16] = { 0 };
vector src;
for (int i = 0; i < n; i++)
{
string pos;
stringstream ss;
ss << i;
ss >> pos;
string img_name = img_dir + "\\" + img_namehead + pos + "." + img_type; //cout << img_name << endl;
Mat outsrc = imread(img_name);
src.push_back(outsrc);
}
return src;
}
private:
};
子函数
#include
#include
using namespace cv;
using namespace std;
/*遗留问题:两点的确立*/
void Water_Cut(InputArray& src, OutputArray& dst, OutputArray& edge)
{
Mat srcImage;
src.copyTo(srcImage);
//cv::resize(srcImage, srcImage, Size(srcImage.cols / 2, srcImage.rows / 2));
cv::namedWindow("resImage", 0);
cv::imshow("resImage", srcImage);
//waitKey();
// 【mask两点】
//mask的第一点 maskImage
Mat maskImage;
maskImage = Mat(srcImage.size(), CV_8UC1); // 掩模,在上面做标记,然后传给findContours
maskImage = Scalar::all(0);
Point point1(0, 0), point2(100, 10);
//line(maskImage, point1, point2, Scalar::all(255), 5, 8, 0);
circle(maskImage, point1, 10, Scalar::all(255), 100);
//mask的第二点 maskImage
Point point3(srcImage.cols / 2, srcImage.rows / 2), point4(srcImage.cols / 2+200, srcImage.rows / 2);
//line(maskImage, point3, point4, Scalar::all(255), 5, 8, 0);
circle(maskImage, point3, 10, Scalar::all(255), 100);
/*namedWindow("resImage", 0);
imshow("resImage", maskImage);
waitKey();*/
// 【轮廓】
vector> contours;
vector hierarchy;
findContours(maskImage, contours, hierarchy, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
// 【分水岭】
// 参数二:maskWaterShed(CV_32S)
Mat maskWaterShed; // watershed()函数的参数
maskWaterShed = Mat(maskImage.size(), CV_32S);//空白掩码 maskWaterShed
maskWaterShed = Scalar::all(0);
/* 在maskWaterShed上绘制轮廓 */
for (int index = 0; index < contours.size(); index++)
drawContours(maskWaterShed, contours, index, Scalar::all(index + 1), -1, 8, hierarchy, INT_MAX);
/* 如果imshow这个maskWaterShed,我们会发现它是一片黑,原因是在上面我们只给它赋了1,2,3这样的值,通过代码80行的处理我们才能清楚的看出结果 */
// 参数一:srcImage(CV_8UC3)
watershed(srcImage, maskWaterShed); //int index = maskWaterShed.at(row, col);操作
// 【随机生成几种颜色】
vector colorTab;
for (int i = 0; i < contours.size(); i++)
{
int b = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int r = theRNG().uniform(0, 255);
colorTab.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
Mat dst_ = Mat::zeros(maskWaterShed.size(), CV_8UC3);
Mat dst_edge = Mat::zeros(maskWaterShed.size(), CV_8UC3);
int index = maskWaterShed.at(maskWaterShed.rows / 2, maskWaterShed.cols / 2);
int index_temp = 0;
for (int i = 0; i < maskWaterShed.rows; i++)
{
for (int j = 0; j < maskWaterShed.cols; j++)
{
index_temp = maskWaterShed.at(i, j);
//cout << index_temp << endl;
if (index_temp == index)//取中心的标签区域
{
dst_edge.at(i, j) = Vec3b((uchar)255, (uchar)255, (uchar)255); //colorTab[index - 1];
dst_.at(i, j) = srcImage.at(i, j);
}
}
}
cv::namedWindow("分割结果", 0);
cv::imshow("分割结果", dst_);
imwrite("条纹1.bmp", dst_);
/*Mat dst_add;
addWeighted(dst_edge, 0.3, srcImage, 0.7, 0, dst_add);
namedWindow("加权结果", 0);
imshow("加权结果", dst_add);*/
cv::namedWindow("连通域", 0);
cv::imshow("连通域", dst_edge);
imwrite("条纹1_.bmp", dst_edge);
dst_.copyTo(dst);
dst_edge.copyTo(edge);
} C++ Opencv HU、MOM、GLCM
/*
第一步:建立类
#include
#include
#include
#include "time.h"
using namespace cv;
using namespace std;
第二步:包含类
Feature feature_class;
第三步:
集合颜色+形状+纹理
// 图像特征_HU
Mat hu_dst = dst.clone();
double Hu[7] = { 0 };
feature_class.feature_hu(hu_dst, Hu);
// 图像特征_COLOR
Mat color_dst = dst.clone();
float Mom[9] = { 0 };
feature_class.feature_color(color_dst, Mom);
// 图像特征_GLCM
Mat glcm_dst = dst.clone();
cv::cvtColor(glcm_dst, glcm_dst, CV_RGB2GRAY);
float glcm_data[16] = { 0 };
feature_class.feature_glcm(glcm_dst, glcm_data);
第四步:
// 特征集合7+9+16
float test_data[32] = { 0 };
for (size_t j = 0; j < 7; j++)
{
test_data[j] = (float)Hu[j];
}
for (size_t j = 0; j < 9; j++)
{
test_data[7 + j] = (float)Mom[j];
}
for (size_t j = 0; j < 16; j++)
{
test_data[16 + j] = (float)glcm_data[j];
}
*/
/* 【颜色】 */
// 颜色 计算三阶矩
double calc3orderMom(Mat &channel) //计算三阶矩
{
uchar *p;
double mom = 0;
double m = mean(channel)[0]; //计算单通道图像的均值
int nRows = channel.rows;
int nCols = channel.cols;
if (channel.isContinuous()) //连续存储有助于提升图像扫描速度
{
nCols *= nRows;
nRows = 1;
}
for (int i = 0; i < nRows; i++) //计算立方和
{
p = channel.ptr(i);
for (int j = 0; j < nCols; j++)
mom += pow((p[j] - m), 3);
}
float temp;
temp = cvCbrt((float)(mom / (nRows*nCols))); //求均值的立方根
mom = (double)temp;
return mom;
}
// 颜色 计算9个颜色矩:3个通道的1、2、3阶矩
double *colorMom(Mat &img)
{
double *Mom = new double[9]; //存放9个颜色矩
if (img.channels() != 3)
std::cout << "Error,input image must be a color image" << endl;
Mat b(img.rows, img.cols, CV_8U);
Mat r(img.rows, img.cols, CV_8U);
Mat g(img.rows, img.cols, CV_8U);
Mat channels[] = { b, g, r };
split(img, channels);
//cv::imshow("r", channels[0]);
//cv::imshow("g", channels[1]);
//cv::imshow("b", channels[2]);
//waitKey(0);
Mat tmp_m, tmp_sd;
//计算b通道的颜色矩
meanStdDev(b, tmp_m, tmp_sd);
Mom[0] = tmp_m.at(0, 0);
Mom[3] = tmp_sd.at(0, 0);
Mom[6] = calc3orderMom(b);
// cout << Mom[0] << " " << Mom[1] << " " << Mom[2] << " " << endl;
//计算g通道的颜色矩
meanStdDev(g, tmp_m, tmp_sd);
Mom[1] = tmp_m.at(0, 0);
Mom[4] = tmp_sd.at(0, 0);
Mom[7] = calc3orderMom(g);
// cout << Mom[3] << " " << Mom[4] << " " << Mom[5] << " " << endl;
//计算r通道的颜色矩
meanStdDev(r, tmp_m, tmp_sd);
Mom[2] = tmp_m.at(0, 0);
Mom[5] = tmp_sd.at(0, 0);
Mom[8] = calc3orderMom(r);
// cout << Mom[6] << " " << Mom[7] << " " << Mom[8] << " " << endl;
return Mom;//返回颜色矩数组
}
// 颜色
bool feature_color(Mat src, float Mom[9])
{
if (src.channels() == 3)
{
// 图像特征_COLOR
Mat color_dst = src.clone();
cv::cvtColor(color_dst, color_dst, CV_RGB2HSV);
double *MOM;
MOM = colorMom(color_dst);
for (int i = 0; i < 9; i++)
{
std::cout << (float)MOM[i] << endl;
Mom[i] = (float)MOM[i];
}
return true;
}
else
{
std::cout << "channels!=3";
return false;
}
}
/* 【形状】 */
bool feature_hu(Mat src, double Hu[7])
{
if (src.channels() == 3)
{
// 图像特征_HU
Mat hu_dst = src.clone();
cv::cvtColor(hu_dst, hu_dst, CV_RGB2GRAY);
Canny(hu_dst, hu_dst, 0, 120);
//double Hu[7]; //存储得到的Hu矩阵
Moments mo = moments(hu_dst);//矩变量
HuMoments(mo, Hu);
for (int i = 0; i < 7; i++)
{
std::cout << (float)Hu[i] << endl;
}
return true;
}
else if ((src.channels() == 1))
{
Mat hu_dst = src.clone();
Canny(hu_dst, hu_dst, 0, 120);
//double Hu[7]; //存储得到的Hu矩阵
Moments mo = moments(hu_dst);//矩变量
HuMoments(mo, Hu);
for (int i = 0; i < 7; i++)
{
std::cout << (float)Hu[i] << endl;
}
return true;
}
else
{
return false;
}
}
// 纹理
const int gray_level = 16;//纹理区域块的大小,通常将图像划分成若干个纹理块计算
vector glamvalue;//全局变量
//【】第一步:j计算共生矩阵
void getglcm_0(Mat& input, Mat& dst)//0度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)//寻找像素灰度最大值
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;//像素灰度最大值加1即为该矩阵所拥有的灰度级数
if (max_gray_level > 16)//若灰度级数大于16,则将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
else//若灰度级数小于16,则生成相应的灰度共生矩阵
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
}
void getglcm_45(Mat& input, Mat& dst)//45度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;
if (max_gray_level > 16)
{
for (int i = 0; i < height; i++)//将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
else
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
}
void getglcm_90(Mat& input, Mat& dst)//90度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;
if (max_gray_level > 16)
{
for (int i = 0; i < height; i++)//将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j];
dst.ptr(rows)[cols]++;
}
}
}
else
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j];
dst.ptr(rows)[cols]++;
}
}
}
}
void getglcm_135(Mat& input, Mat& dst)//135度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;
if (max_gray_level > 16)
{
for (int i = 0; i < height; i++)//将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 1; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j - 1];
dst.ptr(rows)[cols]++;
}
}
}
else
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 1; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j - 1];
dst.ptr(rows)[cols]++;
}
}
}
}
// 【】第二步:计算纹理特征 // 特征值计算—— double& Asm, double& Con, double& Ent, double& Idm
void feature_computer(Mat&src, float& Asm, float& Con, float& Ent, float& Idm)//计算特征值
{
int height = src.rows;
int width = src.cols;
int total = 0;
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
total += srcdata[j];//求图像所有像素的灰度值的和
}
}
Mat copy;
copy.create(height, width, CV_64FC1);
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
float*copydata = copy.ptr(i);
for (int j = 0; j < width; j++)
{
copydata[j] = (float)srcdata[j] / (float)total;//图像每一个像素的的值除以像素总和
}
}
for (int i = 0; i < height; i++)
{
float*srcdata = copy.ptr(i);
for (int j = 0; j < width; j++)
{
Asm += srcdata[j] * srcdata[j]; //能量
if (srcdata[j]>0)
{
Ent -= srcdata[j] * log(srcdata[j]); //熵
}
Con += (float)(i - j)*(float)(i - j)*srcdata[j]; //对比度
Idm += srcdata[j] / (1 + (float)(i - j)*(float)(i - j)); //逆差矩
}
}
}
// 【】融合第一、二步
/*
Mat src_gray;
float data[16] = {0};
*/
void feature_glcm(Mat src_gray, float data[16])
{
Mat dst_0, dst_90, dst_45, dst_135;
getglcm_0(src_gray, dst_0);
float asm_0 = 0, con_0 = 0, ent_0 = 0, idm_0 = 0;
feature_computer(dst_0, asm_0, con_0, ent_0, idm_0);
getglcm_45(src_gray, dst_45);
float asm_45 = 0, con_45 = 0, ent_45 = 0, idm_45 = 0;
feature_computer(dst_45, asm_45, con_45, ent_45, idm_45);
getglcm_90(src_gray, dst_90);
float asm_90 = 0, con_90 = 0, ent_90 = 0, idm_90 = 0;
feature_computer(dst_90, asm_90, con_90, ent_90, idm_90);
getglcm_135(src_gray, dst_135);
float asm_135 = 0, con_135 = 0, ent_135 = 0, idm_135 = 0;
feature_computer(dst_135, asm_135, con_135, ent_135, idm_135);
float AMS[4] = { asm_0, asm_45, asm_90, asm_135 };
float COM[4] = { con_0, con_45, con_90, con_135 };
float ENT[4] = { ent_0, ent_45, ent_90, ent_135 };
float IDM[4] = { idm_0, idm_45, idm_90, idm_135 };
float glcm_data[16] = {
asm_0, asm_45, asm_90, asm_135,
con_0, con_45, con_90, con_135,
ent_0, ent_45, ent_90, ent_135,
idm_0, idm_45, idm_90, idm_135
};
/*std::cout << "特征数据:" << endl;*/
for (size_t i = 0; i < 16; i++)
{
data[i] = glcm_data[i];
//std::cout << data[i] << " ";
}
}
// 读取当前文件夹图片的个数子程序
/*
cv::String pattern = "./save/*.bmp";
int cout = read_images_in_folder(pattern);
*/
size_t read_images_in_folder(cv::String pattern)//读取当前指定目录的图片的个数
{
vector fn;
glob(pattern, fn, false);//OpenCV自带一个函数glob()可以遍历文件
size_t count = fn.size(); //number of png files in images folder
return count;
}
C++ Opencv hog+SVM(opencv3)
// opencv3
#include
#include
#include
#include
#include
using namespace cv::ml;
#define PosSamNO 30 //正样本个数
#define NegSamNO 30 //负样本个数
#define TestSamNO 5 //测试个数
void train_svm_hog()
{
//HOG检测器,用来计算HOG描述子的
//检测窗口(48,48),块尺寸(16,16),块步长(8,8),cell尺寸(8,8),直方图bin个数9
cv::HOGDescriptor hog(cv::Size(48, 48), cv::Size(16, 16), cv::Size(8, 8), cv::Size(8, 8), 9);
int DescriptorDim;//HOG描述子的维数,由图片大小、检测窗口大小、块大小、细胞单元中直方图bin个数决定
//设置SVM参数
cv::Ptr svm = cv::ml::SVM::create();
svm->setType(cv::ml::SVM::Types::C_SVC);
svm->setKernel(cv::ml::SVM::KernelTypes::LINEAR);
svm->setTermCriteria(cv::TermCriteria(cv::TermCriteria::MAX_ITER, 100, 1e-6));
std::string ImgName;
//正样本图片的文件列表
std::ifstream finPos("positive_samples.txt");
//负样本图片的文件列表
std::ifstream finNeg("negative_samples.txt");
//所有训练样本的特征向量组成的矩阵,行数等于所有样本的个数,列数等于HOG描述子维数
cv::Mat sampleFeatureMat;
//训练样本的类别向量,行数等于所有样本的个数,列数等于1;1表示有目标,-1表示无目标
cv::Mat sampleLabelMat;
//依次读取正样本图片,生成HOG描述子
for (int num = 0; num < PosSamNO && getline(finPos, ImgName); num++)
{
std::cout << "Processing:" << ImgName << std::endl;
cv::Mat image = cv::imread(ImgName);
cv::resize(image, image, cv::Size(48, 48));
//HOG描述子向量
std::vector descriptors;
//计算HOG描述子,检测窗口移动步长(8,8)
hog.compute(image, descriptors, cv::Size(8, 8));
//处理第一个样本时初始化特征向量矩阵和类别矩阵,因为只有知道了特征向量的维数才能初始化特征向量矩阵
if (0 == num)
{
//HOG描述子的维数
DescriptorDim = descriptors.size();
//初始化所有训练样本的特征向量组成的矩阵,行数等于所有样本的个数,列数等于HOG描述子维数sampleFeatureMat
sampleFeatureMat = cv::Mat::zeros(PosSamNO + NegSamNO, DescriptorDim, CV_32FC1);
//初始化训练样本的类别向量,行数等于所有样本的个数,列数等于1
sampleLabelMat = cv::Mat::zeros(PosSamNO + NegSamNO, 1, CV_32SC1);
}
//将计算好的HOG描述子复制到样本特征矩阵sampleFeatureMat
for (int i = 0; i < DescriptorDim; i++)
{
//第num个样本的特征向量中的第i个元素
sampleFeatureMat.at(num, i) = descriptors[i];
} //正样本类别为1,判别为无喷溅
sampleLabelMat.at(num, 0) = 1;
}
//依次读取负样本图片,生成HOG描述子
for (int num = 0; num < NegSamNO && getline(finNeg, ImgName); num++)
{
std::cout << "Processing:" << ImgName << std::endl;
cv::Mat src = cv::imread(ImgName);
cv::resize(src, src, cv::Size(48, 48));
//HOG描述子向量
std::vector descriptors;
//计算HOG描述子,检测窗口移动步长(8,8)
hog.compute(src, descriptors, cv::Size(8, 8));
//处理第一个样本时初始化特征向量矩阵和类别矩阵,因为只有知道了特征向量的维数才能初始化特征向量矩阵
//std::cout << "descriptor dimention:" << descriptors.size() << std::endl;
//将计算好的HOG描述子复制到样本特征矩阵sampleFeatureMat
for (int i = 0; i < DescriptorDim; i++)
{
//第PosSamNO+num个样本的特征向量中的第i个元素
sampleFeatureMat.at(num + PosSamNO, i) = descriptors[i];
}
//负样本类别为-1,判别为喷溅
sampleLabelMat.at(num + PosSamNO, 0) = -1;
}
//训练SVM分类器
std::cout << "开始训练SVM分类器" << std::endl;
cv::Ptr td = cv::ml::TrainData::create(sampleFeatureMat, cv::ml::SampleTypes::ROW_SAMPLE, sampleLabelMat);
svm->train(td);
std::cout << "SVM分类器训练完成" << std::endl;
//将训练好的SVM模型保存为xml文件
svm->save("SVM_HOG.xml");
return;
}
void svm_hog_classification()
{
//HOG检测器,用来计算HOG描述子的
//检测窗口(48,48),块尺寸(16,16),块步长(8,8),cell尺寸(8,8),直方图bin个数9
cv::HOGDescriptor hog(cv::Size(48, 48), cv::Size(16, 16), cv::Size(8, 8), cv::Size(8, 8), 9);
//HOG描述子的维数,由图片大小、检测窗口大小、块大小、细胞单元中直方图bin个数决定
int DescriptorDim;
//测试样本图片的文件列表
std::ifstream finTest("test_samples.txt");
std::string ImgName;
for (int num = 0; num < TestSamNO && getline(finTest, ImgName); num++)
{
//从XML文件读取训练好的SVM模型
cv::Ptr svm = cv::ml::SVM::load("SVM_HOG.xml ");
if (svm->empty())
{
std::cout << "load svm detector failed!!!" << std::endl;
return;
}
//针对测试集进行识别
std::cout << "开始识别..." << std::endl;
std::cout << "Processing:" << ImgName << std::endl;
cv::Mat test = cv::imread(ImgName);
cv::resize(test, test, cv::Size(48, 48));
std::vector descriptors;
hog.compute(test, descriptors);
cv::Mat testDescriptor = cv::Mat::zeros(1, descriptors.size(), CV_32FC1);
for (size_t i = 0; i < descriptors.size(); i++)
{
testDescriptor.at(0, i) = descriptors[i];
}
float label = svm->predict(testDescriptor);
imshow("test image", test);
std::cout << "这张图属于:" << label << std::endl;
cv::waitKey(0);
}
return;
}
int main(int argc, char** argv)
{
train_svm_hog();
svm_hog_classification();
return 0;
} C++ Opencv 特征AKAZE(opencv3.3.0)
特征检测
第一步:检测器
Ptr detector = AKAZE::create(); 第二步:检测器子类—检测
detector->detect(img, keypoints, Mat());计算检测时间(通用):
double t1 = getTickCount();
/*加入你要计算时间的代码段*/
double t2 = getTickCount();
double tkaze = (t2 - t1) / getTickFrequency();
printf("Time consume(s) : %f\n", tkaze);第三步:画出特征点图
drawKeypoints(img, keypoints, keypointImg, Scalar::all(-1), DrawMatchesFlags::DEFAULT);总体程序
// Demo_Feature.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include
#include
using namespace cv;
using namespace std;
int _tmain(int argc, _TCHAR* argv[])
{
Mat img1 = imread("C:\\Users\\Administrator\\Desktop\\样品\\瓷砖\\方格.bmp", IMREAD_GRAYSCALE);
Mat img2 = imread("C:\\Users\\Administrator\\Desktop\\样品\\瓷砖\\方格.bmp", IMREAD_GRAYSCALE);
if (img1.empty() && img2.empty()) {
printf("could not load image...\n");
return -1;
}
imshow("input image", img1);
// kaze detection
Ptr detector = AKAZE::create();
vector keypoints;
double t1 = getTickCount();
detector->detect(img1, keypoints, Mat());
double t2 = getTickCount();
double tkaze = 1000 * (t2 - t1) / getTickFrequency();
printf("KAZE Time consume(ms) : %f", tkaze);
Mat keypointImg;
drawKeypoints(img1, keypoints, keypointImg, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
imshow("kaze key points", keypointImg);
waitKey(0);
return 0;
} 特征匹配
第一步:检测器
Ptr detector = AKAZE::create(); 第二步: 检测器子类—检测和计算
detector->detectAndCompute(img1, Mat(), keypoints_obj, descriptor_obj);
detector->detectAndCompute(img2, Mat(), keypoints_scene, descriptor_scene);第三步: 计算结果匹配
// 构建匹配器
FlannBasedMatcher matcher(new flann::LshIndexParams(20, 10, 2));
// 进行匹配
matcher.match(descriptor_obj, descriptor_scene, matches);第四步:匹配结果画出
drawMatches(img1, keypoints_obj, img2, keypoints_scene, matches, akazeMatchesImg);第五步:最佳匹配选取
vector goodMatches;
double minDist = 100000, maxDist = 0;
for (int i = 0; i < descriptor_obj.rows; i++) {
double dist = matches[i].distance;
if (dist < minDist) {
minDist = dist;
}
if (dist > maxDist) {
maxDist = dist;
}
}
printf("min distance : %f", minDist);
for (int i = 0; i < descriptor_obj.rows; i++) {
double dist = matches[i].distance;
if (dist < max(1.5*minDist, 0.02)) {
goodMatches.push_back(matches[i]);
}
} 第六步:最佳匹配结果画出
drawMatches(img1, keypoints_obj, img2, keypoints_scene, goodMatches, akazeMatchesImg, Scalar::all(-1),Scalar::all(-1), vector(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS); 总体程序
// Demo_Feature.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include
#include
using namespace cv;
using namespace std;
int _tmain(int argc, _TCHAR* argv[])
{
Mat img1 = imread("C:\\Users\\Administrator\\Desktop\\样品\\瓷砖\\方格.bmp", IMREAD_GRAYSCALE);
Mat img2 = imread("C:\\Users\\Administrator\\Desktop\\样品\\瓷砖\\方格.bmp", IMREAD_GRAYSCALE);
if (img1.empty() && img2.empty()) {
printf("could not load image...\n");
return -1;
}
imshow("box image", img1);
imshow("scene image", img2);
// extract akaze features
Ptr detector = AKAZE::create();
vector keypoints_obj;
vector keypoints_scene;
Mat descriptor_obj, descriptor_scene;
double t1 = getTickCount();
detector->detectAndCompute(img1, Mat(), keypoints_obj, descriptor_obj);
detector->detectAndCompute(img2, Mat(), keypoints_scene, descriptor_scene);
double t2 = getTickCount();
double tkaze = 1000 * (t2 - t1) / getTickFrequency();
printf("AKAZE Time consume(ms) : %f\n", tkaze);
// matching
FlannBasedMatcher matcher(new flann::LshIndexParams(20, 10, 2));
//FlannBasedMatcher matcher;
vector matches;
matcher.match(descriptor_obj, descriptor_scene, matches);
// draw matches(key points)
Mat akazeMatchesImg;
drawMatches(img1, keypoints_obj, img2, keypoints_scene, matches, akazeMatchesImg);
imshow("akaze match result", akazeMatchesImg);
vector goodMatches;
double minDist = 100000, maxDist = 0;
for (int i = 0; i < descriptor_obj.rows; i++) {
double dist = matches[i].distance;
if (dist < minDist) {
minDist = dist;
}
if (dist > maxDist) {
maxDist = dist;
}
}
printf("min distance : %f", minDist);
for (int i = 0; i < descriptor_obj.rows; i++) {
double dist = matches[i].distance;
if (dist < max(1.5*minDist, 0.02)) {
goodMatches.push_back(matches[i]);
}
}
drawMatches(img1, keypoints_obj, img2, keypoints_scene, goodMatches, akazeMatchesImg, Scalar::all(-1),
Scalar::all(-1), vector(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
imshow("good match result", akazeMatchesImg);
waitKey(0);
return 0;
} C++ Opencv 矩形分割
图像预处理分割目标
// ROI提取
Mat Image_ROI(Mat frame)
{
Mat gray, bw, img, bkup;
/*目标提取——预处理——Mat ROI*/
/*预处理很重要——直接找到目标*/
//预处理很重要——直接找到目标
// 灰度化
cv::cvtColor(frame, gray, CV_BGR2GRAY);
img = gray.clone();
// 高斯滤波
cv::GaussianBlur(img, img, Size(5, 5), 0, 0); //高斯滤波
// 膨胀操作
Mat element = getStructuringElement(MORPH_RECT, Size(3, 3)); //第一个参数MORPH_RECT表示矩形的卷积核,当然还可以选择椭圆形的、交叉型的
cv::dilate(img, img, element); //实现过程中发现,适当的膨胀很重要
//边缘检测
cv::Canny(img, img, 30, 120, 3); //边缘提取
//namedWindow("get contour", 1);
// cv::imshow("get contour", img);
//从包好目标轮廓里面找矩形的轮廓
/**/
bkup = gray.clone();
Mat dstImg = frame.clone();
// cv::imshow("原图", dstImg);//原图
/**/
vector> contours;
vector hierarcy;
cv::findContours(img, contours, hierarcy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE);
vector boundRect(contours.size());
vector box(contours.size());
Point2f rect[4];
Mat image_object;
for (int i = 0; i < contours.size(); i++)
{
box[i] = minAreaRect(Mat(contours[i]));
if (box[i].size.width < 100 || box[i].size.height < 100)//筛选
continue;
//rectangle(dstImg, Point(boundRect[i].x, boundRect[i].y), Point(boundRect[i].x + boundRect[i].width, boundRect[i].y + boundRect[i].height), Scalar(0, 255, 0), 2, 8);
//circle(dstImg, Point(box[i].center.x, box[i].center.y), 5, Scalar(255, 255, 0), -1, 8);
box[i].points(rect);
/*for (int j = 0; j<4; j++)
{
line(dstImg, rect[j], rect[(j + 1) % 4], Scalar(255, 0, 255), 2, 8);
}*/
float angle;
std::cout << "angle=" << box[i].angle << endl;
angle = box[i].angle;
char width[20], height[20];
sprintf_s(width, "width=%0.2f", box[i].size.width);
sprintf_s(height, "height=%0.2f", box[i].size.height);
//putText(dstImg, width, Point(195, 260), CV_FONT_HERSHEY_COMPLEX_SMALL, 0.85, Scalar(255, 255, 0));
//putText(dstImg, height, Point(190, 285), CV_FONT_HERSHEY_COMPLEX_SMALL, 0.85, Scalar(255, 255, 0));
//利用仿射变换进行旋转 另一种方法,透视变换
if (0 < abs(angle) && abs(angle) <= 45)
angle = angle;//负数,顺时针旋转
else if (45 < abs(angle) && abs(angle) < 90)
angle = 90 - abs(angle);//正数,逆时针旋转
Point2f center = box[i].center; //定义旋转中心坐标
double angle0 = angle;
double scale = 1;
Mat roateM = getRotationMatrix2D(center, angle0, scale); //获得旋转矩阵,顺时针为负,逆时针为正
Mat roate_img;
warpAffine(dstImg, roate_img, roateM, dstImg.size()); //仿射变换结果frame
// imshow("roateM", roate_img);
/**/
boundRect[i] = boundingRect(Mat(contours[i]));
//显示昉射后的目标区域图
int x0 = 0, y0 = 0, w0 = 0, h0 = 0;
x0 = boundRect[i].x;
y0 = boundRect[i].y;
w0 = boundRect[i].width;
h0 = boundRect[i].height;
Mat ROI = roate_img(Rect(x0, y0, w0, h0));//截取对应的区域
//imshow("ROI", ROI);
image_object = ROI;
imwrite("测试ROI的准确性.jpg", ROI);
}
return image_object;
} C++ vector容器打印
容器vector打印:
vector keypoints_obj;
/*
分KeyPoint类和vector容器操作
*/
std::cout << "keypoints_obj尺寸:" << keypoints_obj.size() << endl;
for (size_t i = 0; i < keypoints_obj.size(); i++)
{
std::cout << "keypoints_obj关键点的方向:" << keypoints_obj[i].angle << endl;
std::cout << "keypoints_obj关键点的坐标:" << keypoints_obj[i].pt.x << keypoints_obj[i].pt.y << endl;
} 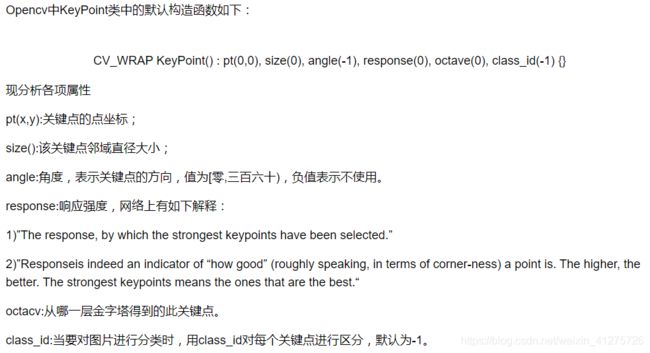
C++ FlyCapture相机
需要材料
FlyCapture2:https://pan.baidu.com/s/14NSxArB5l-bZs229C9RHVA
FlycaptureTime:https://pan.baidu.com/s/1YP9dobp2VnBHESQscjN3DA
C++ Modbus通信
需要材料:
libmodbus、调试助手
modbus发送数据子函数
第一步:
#include modbus.h
第二步:
char *ip = "192.168.83.75";
int port = 502;
int SERVER_ID = 2; //从端设备slave
int LOOP = 1; //循环次数
int ADDRESS_START = 4096; //测试寄存器起始地址
int ADDRESS_END = 4102; //测试寄存器结束地址
int nb = ADDRESS_END - ADDRESS_START;
/*申请存储空间*/
uint16_t *send_data;
send_data = (uint16_t *)malloc(nb * sizeof(uint16_t));
memset(send_data, 0, nb* sizeof(uint16_t));
for (int i = 0; i < nb; i++)
{
send_data[i] = (uint16_t)(0);//发送的数据输入
}
int flag = modbus_tcpip_send_data(send_data, ip, port, SERVER_ID, LOOP, ADDRESS_START, ADDRESS_END);//发送失败返回-1
第三步:
int modbus_tcpip_send_data(uint16_t *send_data, char *ip, int port, int SERVER_ID, int LOOP, int ADDRESS_START, int ADDRESS_END)
{
modbus_t *ctx;
int rc;
int nb_fail;
int nb_loop;
int addr;
int nb;
uint16_t *tab_rq_registers;
uint16_t *tab_rp_registers;
/*连接TCP*///("Master"(主盘)接口和"Slave"(从盘)接口)
ctx = modbus_new_tcp(ip, port);
modbus_set_debug(ctx, TRUE);//调试:返回IP和port
modbus_set_slave(ctx, SERVER_ID);
/*连接报错*/
if (modbus_connect(ctx) == -1)
{
modbus_free(ctx);
return -1;
}
nb = ADDRESS_END - ADDRESS_START;
/*申请存储空间*/
tab_rq_registers = (uint16_t *)malloc(nb * sizeof(uint16_t));
memset(tab_rq_registers, 0, nb* sizeof(uint16_t));
tab_rp_registers = (uint16_t *)malloc(nb * sizeof(uint16_t));
memset(tab_rp_registers, 0, nb* sizeof(uint16_t));
/*设定欲写入的数值*/
for (addr = ADDRESS_START; addr < ADDRESS_END; addr++)
{
for (int i = 0; i < nb; i++)
{
tab_rq_registers[i] = (uint16_t)(send_data[i]);//(uint16_t)(65535.0 * rand() / (RAND_MAX + 1.0));
}
}
/*传送与读取数据*/
nb_loop = nb_fail = 0;
while (nb_loop++ < LOOP)//写入的条件(一满足【条件】即写入并返回正确写入的【标志】)
{
int i;
addr = ADDRESS_START;
/*寄存器的批量写*/
rc = modbus_write_registers(ctx, ADDRESS_START, nb, tab_rq_registers);//返回rc为写入
if (rc != nb)
{//rc!=nb则写入错误
nb_fail++;//错误的标识
}
else
{//正确写入后,读取寄存器状态
rc = modbus_read_registers(ctx, ADDRESS_START, nb, tab_rp_registers);
if (rc != nb)
{//rc!=nb则读取失败
nb_fail++;
}/*单步调试成功*/
else
{//正确读取后,返回正确标志
for (i = 0; i < nb; i++)
{
if (tab_rq_registers[i] != tab_rp_registers[i])
{//寄存器数值不匹配则:
nb_fail++;
}/*单步调试成功*/
}
}
}
if (nb_fail)return -1;
else return 0;
/*释放内存*/
free(tab_rq_registers);
free(tab_rp_registers);
/*关闭连接*/
modbus_close(ctx);
modbus_free(ctx);
}
}C++ Opencv xml调用
需要材料:
xml
xml2
// getheader.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include "opencv2/objdetect/objdetect.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include
#include
using namespace std;
using namespace cv;
/** Function Headers */
void detectAndDisplay( Mat frame );
/** Global variables */
//-- Note, either copy these two files from opencv/data/haarscascades to your current folder, or change these locations
String face_cascade_name = "haarcascade_frontalface_alt.xml";
String eyes_cascade_name = "haarcascade_eye_tree_eyeglasses.xml";
CascadeClassifier face_cascade;
CascadeClassifier eyes_cascade;
string window_name = "Capture - Face detection";
RNG rng(12345);
const int FRAME_WIDTH = 1280;
const int FRAME_HEIGHT = 240;
/**
* @function main
*/
int main( void )
{
CvCapture* capture;
//VideoCapture capture;
Mat frame;
//-- 1. Load the cascades
if (!face_cascade.load(face_cascade_name)){ printf("--(!)Error loading\n"); system("pause"); return -1; };
if (!eyes_cascade.load(eyes_cascade_name)){ printf("--(!)Error loading\n"); system("pause"); return -1; };
frame = imread("1.jpg");//背景图片
detectAndDisplay(frame);
//VideoCapture cap(0); //打开默认的摄像头号
//if(!cap.isOpened()) //检测是否打开成功
// return -1;
//Mat edges;
namedWindow("edges",1);
//for(;;)
//{
// Mat frame;
// cap >> frame; // 从摄像头中获取新的一帧
// detectAndDisplay( frame );
// //imshow("edges", frame);
// if(waitKey(30) >= 0) break;
//}
摄像头会在VideoCapture的析构函数中释放
waitKey(0);
return 0;
}
void mapToMat(const cv::Mat &srcAlpha, cv::Mat &dest, int x, int y)
{
int nc = 3;
int alpha = 0;
for (int j = 0; j < srcAlpha.rows; j++)
{
for (int i = 0; i < srcAlpha.cols*3; i += 3)
{
alpha = srcAlpha.ptr(j)[i / 3*4 + 3];
//alpha = 255-alpha;
if(alpha != 0) //4通道图像的alpha判断
{
for (int k = 0; k < 3; k++)
{
// if (src1.ptr(j)[i / nc*nc + k] != 0)
if( (j+y < dest.rows) && (j+y>=0) &&
((i+x*3) / 3*3 + k < dest.cols*3) && ((i+x*3) / 3*3 + k >= 0) &&
(i/nc*4 + k < srcAlpha.cols*4) && (i/nc*4 + k >=0) )
{
dest.ptr(j+y)[(i+x*nc) / nc*nc + k] = srcAlpha.ptr(j)[(i) / nc*4 + k];
}
}
}
}
}
}
/**
* @function detectAndDisplay
*/
void detectAndDisplay( Mat frame )
{
std::vector faces;
Mat frame_gray;
Mat hatAlpha;
hatAlpha = imread("2.png",-1);//圣诞帽的图片
cvtColor( frame, frame_gray, COLOR_BGR2GRAY );
equalizeHist( frame_gray, frame_gray );
//-- Detect faces
face_cascade.detectMultiScale( frame_gray, faces, 1.1, 2, 0|CV_HAAR_SCALE_IMAGE, Size(30, 30) );
for( size_t i = 0; i < faces.size(); i++ )
{
Point center( faces[i].x + faces[i].width/2, faces[i].y + faces[i].height/2 );
// ellipse( frame, center, Size( faces[i].width/2, faces[i].height/2), 0, 0, 360, Scalar( 255, 0, 255 ), 2, 8, 0 );//画人脸
// line(frame,Point(faces[i].x,faces[i].y),center,Scalar(255,0,0),5);//人脸中心线
Mat faceROI = frame_gray( faces[i] );
std::vector eyes;
//-- In each face, detect eyes
eyes_cascade.detectMultiScale( faceROI, eyes, 1.1, 2, 0 |CV_HAAR_SCALE_IMAGE, Size(30, 30) );
for( size_t j = 0; j < eyes.size(); j++ )
{
Point eye_center( faces[i].x + eyes[j].x + eyes[j].width/2, faces[i].y + eyes[j].y + eyes[j].height/2 );
int radius = cvRound( (eyes[j].width + eyes[j].height)*0.25 );
//circle( frame, eye_center, radius, Scalar( 255, 0, 0 ), 3, 8, 0 ); //画眼睛
}
// if(eyes.size())
{
resize(hatAlpha,hatAlpha,Size(faces[i].width, faces[i].height),0,0,INTER_LANCZOS4);
// mapToMat(hatAlpha,frame,center.x+2.5*faces[i].width,center.y-1.3*faces[i].height);
mapToMat(hatAlpha,frame,faces[i].x,faces[i].y-0.8*faces[i].height);
}
}
//-- Show what you got
imshow( window_name, frame );
//imwrite("merry christmas.jpg",frame);
} C++ Opencv xvid编码录像
Opencv+XVID编码录像
参考
附件:![]()
/*
早期用Opencv打开相机进行录像的代码,可行的,太久没碰,贴上来。
*/
//(摄像头录像)//配合xvid编码器进行录像
void opencv_capture_save_x32_cp()
{
CvCapture* capture = 0;
CvVideoWriter* video = NULL;
IplImage* frame = 0;
int n;
capture = cvCreateCameraCapture(0);
if (!capture)
{
cout << "Can not open the camera." << endl;
printf("Can not open the camera."); //读取不成功,则标识
}
else
{
frame = cvQueryFrame(capture); //首先取得摄像头中的一帧
const char*videoPath = "camera.avi";
//int fourcc = CV_FOURCC('X', 'V', 'I', 'D'); //方法一:偶尔会失败——因为没有自动打开编译器
int fourcc = -1;//用-1可以自己选择编码格式--避免编码器不打开 //方法二:人工选择——,从未失败
video = cvCreateVideoWriter(videoPath, fourcc, 25,
cvSize(frame->width, frame->height)); //创建CvVideoWriter对象并分配空间
//保存的文件名为camera.avi,编码要在运行程序时选择,大小就是摄像头视频的大小,帧频率是32
if (video) //如果能创建CvVideoWriter对象则表明成功
{
cout << "VideoWriter has created." << endl;
}
cvNamedWindow("Camera Video", 0); //新建一个窗口
bool stop = false;
while (!stop) //
{
frame = cvQueryFrame(capture); //从CvCapture中获得一帧
if (!frame) break;
cvShowImage("Camera Video", frame); //显示视频内容的图片
n = cvWriteFrame(video, frame); //判断是否写入成功,如果返回的是1,表示写入成功
if (!n) break;
//stop = true;//停止标志
if (cvWaitKey(10) >= 0) break; //有其他键盘响应,则退出
}
}
cvReleaseVideoWriter(&video);
cvReleaseCapture(&capture);
cvDestroyWindow("Camera Video");
}// 类型转换:IplImage*—>Mat
IplImage* iplimg = cvLoadImage("heels.jpg");
Mat matImg;
matImg = Mat(iplimg);
// 类型转换:Mat—>IplImage*
IplImage *frame;
Mat Img;
frame = &IplImage(Img); //取Mat值到指针
// 或者 *frame=IplImage(Img);
工业相机录像
#include"stdafx.h"
#include
#include
#include
#include
using namespace cv;
using namespace std;
//请用户提前配置好工程头文件目录,需要包含GalaxyIncludes.h
#include"GalaxyIncludes.h"
Mat src;
int _tmain(int argc, _TCHAR* argv[])
{
//初始化
IGXFactory::GetInstance().Init();
try
{
do
{
//枚举设备
gxdeviceinfo_vector vectorDeviceInfo;
IGXFactory::GetInstance().UpdateDeviceList(1000, vectorDeviceInfo);
if (0 == vectorDeviceInfo.size())
{
cout << "无可用设备!" << endl;
break;
}
//打开第一台设备以及设备下面第一个流
CGXDevicePointer ObjDevicePtr = IGXFactory::GetInstance().OpenDeviceBySN(
vectorDeviceInfo[0].GetSN(),
GX_ACCESS_EXCLUSIVE);
CGXStreamPointer ObjStreamPtr = ObjDevicePtr->OpenStream(0);
//获取远端设备属性控制器
CGXFeatureControlPointer ObjFeatureControlPtr = ObjDevicePtr->GetRemoteFeatureControl();
//发送开采命令
ObjStreamPtr->StartGrab();
ObjFeatureControlPtr->GetCommandFeature("AcquisitionStart")->Execute();
//主程序
//采单帧
CvCapture* capture = 0;
CvVideoWriter* video = NULL;
IplImage* frame = 0;
const char*videoPath = "camera.avi";
int n;
bool flag = true;
int a = 1;
while (a)
{
CImageDataPointer objImageDataPtr;
objImageDataPtr = ObjStreamPtr->GetImage(500);//超时时间使用500ms,用户可以自行设定
if (objImageDataPtr->GetStatus() == GX_FRAME_STATUS_SUCCESS)
{
//getchar();
//采图成功而且是完整帧,可以进行图像处理...
cout << "收到一帧图像!" << endl;
cout << "ImageInfo: " << objImageDataPtr->GetStatus() << endl;
cout << "ImageInfo: " << objImageDataPtr->GetWidth() << endl;
cout << "ImageInfo: " << objImageDataPtr->GetHeight() << endl;
cout << "ImageInfo: " << objImageDataPtr->GetPayloadSize() << endl;
cout << objImageDataPtr->GetPixelFormat() << endl;
cout << GX_PIXEL_FORMAT_BAYER_GR8 << endl;
//假设原始数据是BayerRG8图像,则 GX_BIT_0_7
void* pRGB24Buffer = NULL;
pRGB24Buffer = objImageDataPtr->ConvertToRGB24(GX_BIT_0_7, GX_RAW2RGB_NEIGHBOUR, true);
Mat test;
test.create(objImageDataPtr->GetHeight(), objImageDataPtr->GetWidth(), CV_8UC3);
memcpy(test.data, pRGB24Buffer, objImageDataPtr->GetPayloadSize() * 3);
if (flag == true)//一次
{
flag = false;
frame = &IplImage(test);
//int fourcc = CV_FOURCC('X', 'V', 'I', 'D'); //方法一:偶尔会失败——因为没有自动打开编译器
int fourcc = -1;//用-1可以自己选择编码格式--避免编码器不打开 //方法二:人工选择——,从未失败
video = cvCreateVideoWriter(videoPath, fourcc, 4,
cvSize(frame->width, frame->height)); //创建CvVideoWriter对象并分配空间
if (video) //如果能创建CvVideoWriter对象则表明成功
{
cout << "VideoWriter has created." << endl;
}
cvNamedWindow("Camera Video", 0); //新建一个窗口
}
frame = &IplImage(test);
if (!frame) break;
cvShowImage("Camera Video", frame); //显示视频内容的图片
n = cvWriteFrame(video, frame); //判断是否写入成功,如果返回的是1,表示写入成功
if (!n) break;
//system("pause");
if (waitKey(20)==27)
{
a = 0;
break;
}
}
}
cvReleaseVideoWriter(&video);
cvDestroyWindow("Camera Video");
//发送停采命令
ObjFeatureControlPtr->GetCommandFeature("AcquisitionStop")->Execute();
ObjStreamPtr->StopGrab();
//释放资源
ObjStreamPtr->Close();
ObjDevicePtr->Close();
} while (false);
}
catch (CGalaxyException&e)
{
cout << "错误码: " << e.GetErrorCode() << endl;
cout << "错误描述信息: " << e.what() << endl;
}
catch (std::exception&e)
{
cout << "错误描述信息: " << e.what() << endl;
}
//反初始化库
IGXFactory::GetInstance().Uninit();
return 0;
}


C++ Opencv glcm
#include
#include
#include
#include
#include
#include
#include
using namespace std;
using namespace cv;
class MyGLCM
{
public:
MyGLCM();
~MyGLCM();
const int gray_level = 16;//纹理区域块的大小,通常将图像划分成若干个纹理块计算
vector glamvalue;//全局变量
//【】第一步:j计算共生矩阵
// 0度灰度共生矩阵
void getglcm_0(Mat& input, Mat& dst)//0度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)//寻找像素灰度最大值
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;//像素灰度最大值加1即为该矩阵所拥有的灰度级数
if (max_gray_level > 16)//若灰度级数大于16,则将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
else//若灰度级数小于16,则生成相应的灰度共生矩阵
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
}
// 45度灰度共生矩阵
void getglcm_45(Mat& input, Mat& dst)//45度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;
if (max_gray_level > 16)
{
for (int i = 0; i < height; i++)//将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
else
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
}
// 90度灰度共生矩阵
void getglcm_90(Mat& input, Mat& dst)//90度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;
if (max_gray_level > 16)
{
for (int i = 0; i < height; i++)//将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j];
dst.ptr(rows)[cols]++;
}
}
}
else
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j];
dst.ptr(rows)[cols]++;
}
}
}
}
// 135度灰度共生矩阵
void getglcm_135(Mat& input, Mat& dst)//135度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;
if (max_gray_level > 16)
{
for (int i = 0; i < height; i++)//将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 1; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j - 1];
dst.ptr(rows)[cols]++;
}
}
}
else
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 1; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j - 1];
dst.ptr(rows)[cols]++;
}
}
}
}
// 【】第二步:计算纹理特征
// 特征值计算—— double& Asm, double& Con, double& Ent, double& Idm
void feature_computer(Mat&src, float& Asm, float& Con, float& Ent, float& Idm)//计算特征值
{
int height = src.rows;
int width = src.cols;
int total = 0;
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
total += srcdata[j];//求图像所有像素的灰度值的和
}
}
Mat copy;
copy.create(height, width, CV_64FC1);
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
float*copydata = copy.ptr(i);
for (int j = 0; j < width; j++)
{
copydata[j] = (float)srcdata[j] / (float)total;//图像每一个像素的的值除以像素总和
}
}
for (int i = 0; i < height; i++)
{
float*srcdata = copy.ptr(i);
for (int j = 0; j < width; j++)
{
Asm += srcdata[j] * srcdata[j]; //能量
if (srcdata[j]>0)
{
Ent -= srcdata[j] * log(srcdata[j]); //熵
}
Con += (float)(i - j)*(float)(i - j)*srcdata[j]; //对比度
Idm += srcdata[j] / (1 + (float)(i - j)*(float)(i - j)); //逆差矩
}
}
}
private:
};
MyGLCM::MyGLCM()
{
}
MyGLCM::~MyGLCM()
{
} C++ Opencv 同态滤波
/*
#include
#include
#include
#include
#include
using namespace cv;
using namespace std;
*/
imshow("原图", src);
int M = getOptimalDFTSize(src.rows);
int N = getOptimalDFTSize(src.cols);
resize(src, src, Size(N, M));
src.convertTo(src, CV_64FC1);//CV_64FC1:每一个像素点元素占64位浮点数,通道数为1
dst.convertTo(dst, CV_64FC1);
//0. 对图片进行归一化
src = src / 255.0;
//1. ln
/*
使用ptr操作srcImg,返回的值写入 srcImg
*/
for (int i = 0; i < src.rows; i++)
{
double* srcdata = src.ptr(i);
double* logdata = src.ptr(i);
for (int j = 0; j < src.cols; j++)
{
logdata[j] = log(srcdata[j] + 1);
}
}
imshow("对数计算结果", src);
//离散余弦变换(同傅里叶变换)
//2. dct:Discrete Cosine Transform
/*
返回 mat_dct
*/
Mat mat_dct = Mat::zeros(src.rows, src.cols, CV_64FC1);
dct(src, mat_dct);
imshow("离散余弦变换", mat_dct);
//3. linear filter
/*
频域滤波器
*/
Mat H_u_v;
double gammaH = 1.5;//1.5
double gammaL = 0.5;//0.5
double C = 1;
double d0 = 10;//(srcImg.rows / 2)*(srcImg.rows / 2) + (srcImg.cols / 2)*(srcImg.cols / 2);
double d2 = 0;
H_u_v = Mat::zeros(src.rows, src.cols, CV_64FC1);
double totalWeight = 0.0;
for (int i = 0; i < src.rows; i++)
{
double * dataH_u_v = H_u_v.ptr(i);
for (int j = 0; j < src.cols; j++)
{
d2 = pow((i), 2.0) + pow((j), 2.0);
dataH_u_v[j] = (gammaH - gammaL)*(1 - exp(-C*d2 / d0)) + gammaL;
totalWeight += dataH_u_v[j];
}
}
H_u_v.ptr(0)[0] = 1.1;
imshow("频域滤波器", H_u_v);
imshow("频域滤波前", mat_dct);
mat_dct = mat_dct.mul(H_u_v);
imshow("频域滤波", mat_dct);
//4. idct
/*
离散余弦反变换
*/
idct(mat_dct, dst);
imshow("离散余弦反变换",dst);
// 5. 指数变换
for (int i = 0; i < src.rows; i++)
{
double* srcdata = dst.ptr(i);
double* dstdata = dst.ptr(i);
for (int j = 0; j < src.cols; j++)
{
dstdata[j] = exp(srcdata[j]);
}
}
imshow("指数计算结果", dst);
// 6.数据恢复
normalize(dst, dst, 0, 255, CV_MINMAX);
convertScaleAbs(dst, dst);
dst.convertTo(dst, CV_8UC1);
for (int i = 0; i < dst.rows; i++)
{
cout << dst.at(i) << endl;
}
imshow("数据恢复", dst);
} C++ Opencv hsv的h直方图
#include
#include
#include
using namespace cv;
using namespace std;
/*
如何调用
Mat src, histimg = Mat::zeros(540, 540, CV_8UC3);
getHistImg(src, histimg);
*/
void getHistImg(const Mat src, Mat &histimg) {
Mat hue, hist;
int hsize = 16;//直方图bin的个数
float hranges[] = { 0, 180 };
const float* phranges = hranges;
int ch[] = { 0, 0 };
hue.create(src.size(), src.depth());
mixChannels(&src, 1, &hue, 1, ch, 1);//得到H分量
calcHist(&hue, 1, 0, Mat(), hist, 1, &hsize, &phranges);
normalize(hist, hist, 0, 255, NORM_MINMAX);
histimg = Scalar::all(0);
int binW = histimg.cols / hsize;
Mat buf(1, hsize, CV_8UC3);
for (int i = 0; i < hsize; i++)
buf.at(i) = Vec3b(saturate_cast(i*180. / hsize), 255, 255);
cvtColor(buf, buf, COLOR_HSV2BGR);
for (int i = 0; i < hsize; i++)
{
int val = saturate_cast(hist.at(i)*histimg.rows / 255);
rectangle(histimg, Point(i*binW, histimg.rows),
Point((i + 1)*binW, histimg.rows - val),
Scalar(buf.at(i)), -1, 8);
}
}
int main()
{
//Mat srcImage = imread("C:\\Users\\Administrator\\Desktop\\b_亮度不同\\B\\01\\菇头B_3.bmp");
//【1】载入图片
Mat srcImage = imread("C:\\Users\\Administrator\\Desktop\\b_亮度不同\\B\\01\\菇头B_3.bmp");
Mat src, histimg = Mat::zeros(540, 540, CV_8UC3);
// 载入图片
src = imread("C:\\Users\\Administrator\\Desktop\\b_亮度不同\\B\\01\\菇头B_3.bmp");
if (!src.data)
{
cout << "load image failed" << endl;
return -1;
}
//转成hsv模型
cvtColor(src, src, CV_BGR2HSV);
// 调用
getHistImg(src, histimg);
imshow("histImage", histimg);
imshow("srcImage", src);
waitKey(0);
system("pause");
return 0;
}

C++ Opencv HSV H、S、V直方图
#include
#include
#include
using namespace cv;
using namespace std;
int main()
{
//Mat srcImage = imread("C:\\Users\\Administrator\\Desktop\\b_亮度不同\\B\\01\\菇头B_3.bmp");
//Mat hsvImage;
//Mat srcImage = imread("C:\\Users\\Administrator\\Desktop\\b_亮度不同\\B\\01\\菇头B_3.bmp");
//打开测试图
IplImage * image = cvLoadImage("C:\\Users\\Administrator\\Desktop\\b_亮度不同\\B\\01\\菇头B_3.bmp", 1); //将本地测试图导入到程序堆中
if (image == NULL){ //判断是否打开成功
printf("错误:无法打开该图像,图像文件路径不正确!");
return -1;
}
//RGB颜色空间到HSV颜色空间
//创建一张空白图像用于存储转换成HSV颜色空间后的图像
IplImage *image1 = cvCreateImage(cvSize(image->width, image->height), image->depth, image->nChannels); //注意图像必须和输入图像的size,颜色位深度,通道一致
cvZero(image1); //清空image_data数据
//颜色空间转换
cvCvtColor(image, image1, CV_BGR2HSV);//CV_BGR2HSV
//创建存储HSV通道图像
IplImage *image_h = cvCreateImage(cvGetSize(image), IPL_DEPTH_8U, 1);//注意,必须是单通道图像
IplImage *image_s = cvCreateImage(cvGetSize(image), IPL_DEPTH_8U, 1);//注意,必须是单通道图像
IplImage *image_v = cvCreateImage(cvGetSize(image), IPL_DEPTH_8U, 1);//注意,必须是单通道图像
//分离通道
cvSplit(image, image_h, image_s, image_v, NULL); //注意Opencv中hsv没有顺序问题
//创建H通道的直方图
int arr_size_h = 255; //定义一个变量用于表示直方图行宽
float hranges_arr_h[] = { 0, 180 }; //图像方块范围数组
float *phranges_arr_h = hranges_arr_h; //cvCreateHist参数是一个二级指针,所以要用指针指向数组然后传参
CvHistogram *hist_h = cvCreateHist(1, &arr_size_h, CV_HIST_ARRAY, &phranges_arr_h, 1); //创建一个一维的直方图,行宽为255,多维密集数组,方块范围为0-180,bin均化
//创建S通道的直方图
int arr_size_s = 255; //定义一个变量用于表示直方图行宽
float hranges_arr_s[] = { 0, 255 }; //图像方块范围数组
float *phranges_arr_s = hranges_arr_s; //cvCreateHist参数是一个二级指针,所以要用指针指向数组然后传参
CvHistogram *hist_s = cvCreateHist(1, &arr_size_s, CV_HIST_ARRAY, &phranges_arr_s, 1); //创建一个一维的直方图,行宽为255,多维密集数组,方块范围为0-255,bin均化
//创建V通道的直方图
int arr_size_v = 255; //定义一个变量用于表示直方图行宽
float hranges_arr_v[] = { 0, 255 }; //图像方块范围数组
float *phranges_arr_v = hranges_arr_v; //cvCreateHist参数是一个二级指针,所以要用指针指向数组然后传参
CvHistogram *hist_v = cvCreateHist(1, &arr_size_v, CV_HIST_ARRAY, &phranges_arr_v, 1); //创建一个一维的直方图,行宽为255,多维密集数组,方块范围为0-255,bin均化
//计算H通道的直方图大小
cvCalcHist(&image_h, hist_h, 0, 0);
//计算S通道的直方图大小
cvCalcHist(&image_s, hist_s, 0, 0);
//计算V通道的直方图大小
cvCalcHist(&image_v, hist_v, 0, 0);
//H通道的直方图缩小
float max_val_h; //用于存储获取到的最大值
cvGetMinMaxHistValue(hist_h, 0, &max_val_h, 0, 0); //获取直方图最大值
cvConvertScale(hist_h->bins, hist_h->bins, max_val_h ? 180 / max_val_h : 0., 0); //按比例缩小直方图
//S通道的直方图缩小
float max_val_s; //用于存储获取到的最大值
cvGetMinMaxHistValue(hist_s, 0, &max_val_s, 0, 0); //获取直方图最大值
cvConvertScale(hist_s->bins, hist_s->bins, max_val_s ? 255 / max_val_s : 0., 0); //按比例缩小直方图
//V通道的直方图缩小
float max_val_v; //用于存储获取到的最大值
cvGetMinMaxHistValue(hist_v, 0, &max_val_v, 0, 0); //获取直方图最大值
cvConvertScale(hist_v->bins, hist_v->bins, max_val_v ? 255 / max_val_v : 0., 0); //按比例缩小直方图
//创建一个空白图像用于绘制直方图
IplImage *histimg = cvCreateImage(cvSize(320, 200), 8, 3);
cvZero(histimg); //清空histimag-imagedata数据
//开始绘制H通道的直方图
int bin_h;
bin_h = histimg->width / arr_size_h; //得到开始绘制点位置
for (int i = 0; i < arr_size_h; i++)
{
double val = (cvGetReal1D(hist_h->bins, i)*histimg->height / 360);//获取矩阵元素值,并转换为对应高度
CvScalar color = CV_RGB(255, 0, 0);
cvRectangle(histimg, cvPoint(i*bin_h, histimg->height), cvPoint((i + 1)*bin_h, (int)(histimg->height - val)), color, 1, 8, 0);
}
//创建一个空白图像用于绘制直方图
IplImage *sistimg = cvCreateImage(cvSize(320, 200), 8, 3);
cvZero(sistimg); //清空histimag-imagedata数据
//开始绘制S通道的直方图
int bin_s;
bin_s = sistimg->width / arr_size_s; //得到开始绘制点位置
for (int i = 0; i < arr_size_s; i++)
{
double val = (cvGetReal1D(hist_s->bins, i)*sistimg->height / 255);//获取矩阵元素值,并转换为对应高度
CvScalar color = CV_RGB(0, 255, 0);
cvRectangle(sistimg, cvPoint(i*bin_s, sistimg->height), cvPoint((i + 1)*bin_s, (int)(sistimg->height - val)), color, 1, 8, 0);
}
//创建一个空白图像用于绘制直方图
IplImage *vistimg = cvCreateImage(cvSize(320, 200), 8, 3);
cvZero(vistimg); //清空histimag-imagedata数据
//开始绘制V通道的直方图
int bin_v;
bin_v = vistimg->width / arr_size_v; //得到开始绘制点位置
for (int i = 0; i < arr_size_v; i++)
{
double val = (cvGetReal1D(hist_v->bins, i)*vistimg->height / 255);//获取矩阵元素值,并转换为对应高度
CvScalar color = CV_RGB(0, 0, 255);
cvRectangle(vistimg, cvPoint(i*bin_v, vistimg->height), cvPoint((i + 1)*bin_v, (int)(vistimg->height - val)), color, 1, 8, 0);
}
//显示图像
cvNamedWindow("image_hsv", 0);
cvNamedWindow("H", 0);
cvNamedWindow("S", 0);
cvNamedWindow("V", 0);
cvShowImage("image_hsv", image1);
cvShowImage("H", histimg);
cvShowImage("S", sistimg);
cvShowImage("V", vistimg);
cvWaitKey(0);//message
return 0;
} 


C++ ATL::CImage和Mat的转换
#include
#include
#include
#include
#include "afxwin.h"
using namespace cv;
using namespace std;
class Mat_CImage
{
public:
void MatToCImage(Mat &mat, ATL::CImage &cImage)
{
//create new CImage
int width = mat.cols;
int height = mat.rows;
int channels = mat.channels();
cImage.Destroy(); //clear
cImage.Create(width, height, 8 * channels); //默认图像像素单通道占用1个字节
//copy values
uchar* ps;
uchar* pimg = (uchar*)cImage.GetBits(); //A pointer to the bitmap buffer
int step = cImage.GetPitch();
for (int i = 0; i < height; ++i)
{
ps = (mat.ptr(i));
for (int j = 0; j < width; ++j)
{
if (channels == 1) //gray
{
*(pimg + i*step + j) = ps[j];
}
else if (channels == 3) //color
{
for (int k = 0; k < 3; ++k)
{
*(pimg + i*step + j * 3 + k) = ps[j * 3 + k];
}
}
}
}
}
void CImageToMat(ATL::CImage& cimage, Mat& mat)
{
if (true == cimage.IsNull())
{
return;
}
int nChannels = cimage.GetBPP() / 8;
if ((1 != nChannels) && (3 != nChannels))
{
return;
}
int nWidth = cimage.GetWidth();
int nHeight = cimage.GetHeight();
//重建mat
if (1 == nChannels)
{
mat.create(nHeight, nWidth, CV_8UC1);
}
else if (3 == nChannels)
{
mat.create(nHeight, nWidth, CV_8UC3);
}
//拷贝数据
uchar* pucRow;//指向数据区的行指针
uchar* pucImage = (uchar*)cimage.GetBits();//指向数据区的指针
int nStep = cimage.GetPitch();//每行的字节数,注意这个返回值有正有负
for (int nRow = 0; nRow < nHeight; nRow++)
{
pucRow = (mat.ptr(nRow));
for (int nCol = 0; nCol < nWidth; nCol++)
{
if (1 == nChannels)
{
pucRow[nCol] = *(pucImage + nRow * nStep + nCol);
}
else if (3 == nChannels)
{
for (int nCha = 0; nCha < 3; nCha++)
{
pucRow[nCol * 3 + nCha] = *(pucImage + nRow * nStep + nCol * 3 + nCha);
}
}
}
}
}
}; C++ Opencv 图像目标分割
#include
#include
#include
using namespace cv;
using namespace std;
/*
如何使用
输入:src
输出: Mat dst, edge;
Water_Cut(Mat& src, OutputArray& dst, OutputArray& edge)
*/
void Water_Cut(Mat& src, OutputArray& dst, OutputArray& edge)
{
Mat srcImage = src.clone();
//src.copyTo(srcImage);
//cv::resize(srcImage, srcImage, Size(srcImage.cols / 2, srcImage.rows / 2));
//namedWindow("resImage", 0);
//imshow("resImage", srcImage);
//waitKey();
// 【mask两点】
//mask的第一点 maskImage
Mat maskImage;
maskImage = Mat(srcImage.size(), CV_8UC1); // 掩模,在上面做标记,然后传给findContours
maskImage = Scalar::all(0);
Point point1(0, 0), point2(10, 10);
line(maskImage, point1, point2, Scalar::all(255), 5, 8, 0);
//mask的第二点 maskImage
Point point3(srcImage.cols / 2, srcImage.rows / 2), point4(srcImage.cols / 2, srcImage.rows / 2);
line(maskImage, point3, point4, Scalar::all(255), 5, 8, 0);
// 【轮廓】
vector> contours;
vector hierarchy;
findContours(maskImage, contours, hierarchy, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
// 【分水岭】
// 参数二:maskWaterShed(CV_32S)
Mat maskWaterShed; // watershed()函数的参数
maskWaterShed = Mat(maskImage.size(), CV_32S);//空白掩码 maskWaterShed
maskWaterShed = Scalar::all(0);
/* 在maskWaterShed上绘制轮廓 */
for (int index = 0; index < contours.size(); index++)
drawContours(maskWaterShed, contours, index, Scalar::all(index + 1), -1, 8, hierarchy, INT_MAX);
/* 如果imshow这个maskWaterShed,我们会发现它是一片黑,原因是在上面我们只给它赋了1,2,3这样的值,通过代码80行的处理我们才能清楚的看出结果 */
// 参数一:srcImage(CV_8UC3)
watershed(srcImage, maskWaterShed); //int index = maskWaterShed.at(row, col);操作
// 【随机生成几种颜色】
vector colorTab;
for (int i = 0; i < contours.size(); i++)
{
int b = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int r = theRNG().uniform(0, 255);
colorTab.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
Mat dst_ = Mat::zeros(maskWaterShed.size(), CV_8UC3);
Mat dst_edge = Mat::zeros(maskWaterShed.size(), CV_8UC3);
int index = maskWaterShed.at(maskWaterShed.rows / 2, maskWaterShed.cols / 2);
int index_temp = 0;
for (int i = 0; i < maskWaterShed.rows; i++)
{
for (int j = 0; j < maskWaterShed.cols; j++)
{
index_temp = maskWaterShed.at(i, j);
//cout << index_temp << endl;
if (index_temp == index)//取中心的标签区域
{
dst_edge.at(i, j) = Vec3b((uchar)255, (uchar)255, (uchar)255); //colorTab[index - 1];
dst_.at(i, j) = srcImage.at(i, j);
}
}
}
//namedWindow("分割结果", 0);
//imshow("分割结果", dst_);
/*Mat dst_add;
addWeighted(dst_edge, 0.3, srcImage, 0.7, 0, dst_add);
namedWindow("加权结果", 0);
imshow("加权结果", dst_add);*/
//namedWindow("边缘区域", 0);
//imshow("边缘区域", dst_edge);
//imwrite("方格.bmp", dst_edge);
dst_.copyTo(dst);
dst_edge.copyTo(edge);
}
C++ Opencv 特征Feature.h{颜色、形状、纹理}
#include
#include
#include
#include
#include "time.h"
using namespace cv;
using namespace std;
class Feature
{
public:
/*
第一步:建立类
#include
#include
#include
#include "time.h"
using namespace cv;
using namespace std;
第二步:包含类
Feature feature_class;
第三步:
集合颜色+形状+纹理
// 图像特征_HU
Mat hu_dst = dst.clone();
double Hu[7] = { 0 };
feature_class.feature_hu(hu_dst, Hu);
// 图像特征_COLOR
Mat color_dst = dst.clone();
float Mom[9] = { 0 };
feature_class.feature_color(color_dst, Mom);
// 图像特征_GLCM
Mat glcm_dst = dst.clone();
cv::cvtColor(glcm_dst, glcm_dst, CV_RGB2GRAY);
float glcm_data[16] = { 0 };
feature_class.feature_glcm(glcm_dst, glcm_data);
第四步:
// 特征集合7+9+16
float test_data[32] = { 0 };
for (size_t j = 0; j < 7; j++)
{
test_data[j] = (float)Hu[j];
}
for (size_t j = 0; j < 9; j++)
{
test_data[7 + j] = (float)Mom[j];
}
for (size_t j = 0; j < 16; j++)
{
test_data[16 + j] = (float)glcm_data[j];
}
*/
/* —————————————————————————【颜色】———————————————————— */
// 颜色 计算三阶矩
double calc3orderMom(Mat &channel) //计算三阶矩
{
uchar *p;
double mom = 0;
double m = mean(channel)[0]; //计算单通道图像的均值
int nRows = channel.rows;
int nCols = channel.cols;
if (channel.isContinuous()) //连续存储有助于提升图像扫描速度
{
nCols *= nRows;
nRows = 1;
}
for (int i = 0; i < nRows; i++) //计算立方和
{
p = channel.ptr(i);
for (int j = 0; j < nCols; j++)
mom += pow((p[j] - m), 3);
}
float temp;
temp = cvCbrt((float)(mom / (nRows*nCols))); //求均值的立方根
mom = (double)temp;
return mom;
}
// 颜色 计算9个颜色矩:3个通道的1、2、3阶矩
double *colorMom(Mat &img)
{
double *Mom = new double[9]; //存放9个颜色矩
if (img.channels() != 3)
std::cout << "Error,input image must be a color image" << endl;
Mat b(img.rows, img.cols, CV_8U);
Mat r(img.rows, img.cols, CV_8U);
Mat g(img.rows, img.cols, CV_8U);
Mat channels[] = { b, g, r };
split(img, channels);
//cv::imshow("r", channels[0]);
//cv::imshow("g", channels[1]);
//cv::imshow("b", channels[2]);
//waitKey(0);
Mat tmp_m, tmp_sd;
//计算b通道的颜色矩
meanStdDev(b, tmp_m, tmp_sd);
Mom[0] = tmp_m.at(0, 0);
Mom[3] = tmp_sd.at(0, 0);
Mom[6] = calc3orderMom(b);
// cout << Mom[0] << " " << Mom[1] << " " << Mom[2] << " " << endl;
//计算g通道的颜色矩
meanStdDev(g, tmp_m, tmp_sd);
Mom[1] = tmp_m.at(0, 0);
Mom[4] = tmp_sd.at(0, 0);
Mom[7] = calc3orderMom(g);
// cout << Mom[3] << " " << Mom[4] << " " << Mom[5] << " " << endl;
//计算r通道的颜色矩
meanStdDev(r, tmp_m, tmp_sd);
Mom[2] = tmp_m.at(0, 0);
Mom[5] = tmp_sd.at(0, 0);
Mom[8] = calc3orderMom(r);
// cout << Mom[6] << " " << Mom[7] << " " << Mom[8] << " " << endl;
return Mom;//返回颜色矩数组
}
// 颜色
bool feature_color(Mat src, float Mom[9])
{
if (src.channels() == 3)
{
// 图像特征_COLOR
Mat color_dst = src.clone();
cv::cvtColor(color_dst, color_dst, CV_RGB2HSV);
double *MOM;
MOM = colorMom(color_dst);
for (int i = 0; i < 9; i++)
{
std::cout << (float)MOM[i] << endl;
Mom[i] = (float)MOM[i];
}
return true;
}
else
{
std::cout << "channels!=3";
return false;
}
}
/* —————————————————————————【形状】———————————————————— */
bool feature_hu(Mat src, double Hu[7])
{
if (src.channels() == 3)
{
// 图像特征_HU
Mat hu_dst = src.clone();
Mat kernel(3, 3, CV_32F, Scalar(-1));
cv::cvtColor(hu_dst, hu_dst, CV_RGB2GRAY);
Canny(hu_dst, hu_dst, 0, 120);
namedWindow("hu_dst", 0);
imshow("hu_dst", hu_dst);
waitKey(10);
//double Hu[7]; //存储得到的Hu矩阵
Moments mo = moments(hu_dst);//矩变量
HuMoments(mo, Hu);
for (int i = 0; i < 7; i++)
{
std::cout << (float)Hu[i] << endl;
}
return true;
}
else if ((src.channels() == 1))
{
Mat hu_dst = src.clone();
Canny(hu_dst, hu_dst, 0, 120);
//double Hu[7]; //存储得到的Hu矩阵
Moments mo = moments(hu_dst);//矩变量
HuMoments(mo, Hu);
for (int i = 0; i < 7; i++)
{
std::cout << (float)Hu[i] << endl;
}
return true;
}
else
{
return false;
}
}
/* —————————————————————————【纹理】————————————————————*/
const int gray_level = 16;//纹理区域块的大小,通常将图像划分成若干个纹理块计算
vector glamvalue;//全局变量
//【】第一步:j计算共生矩阵
void getglcm_0(Mat& input, Mat& dst)//0度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)//寻找像素灰度最大值
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;//像素灰度最大值加1即为该矩阵所拥有的灰度级数
if (max_gray_level > 16)//若灰度级数大于16,则将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
else//若灰度级数小于16,则生成相应的灰度共生矩阵
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
}
void getglcm_45(Mat& input, Mat& dst)//45度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;
if (max_gray_level > 16)
{
for (int i = 0; i < height; i++)//将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
else
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width - 1; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j + 1];
dst.ptr(rows)[cols]++;
}
}
}
}
void getglcm_90(Mat& input, Mat& dst)//90度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;
if (max_gray_level > 16)
{
for (int i = 0; i < height; i++)//将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j];
dst.ptr(rows)[cols]++;
}
}
}
else
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 0; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j];
dst.ptr(rows)[cols]++;
}
}
}
}
void getglcm_135(Mat& input, Mat& dst)//135度灰度共生矩阵
{
Mat src = input;
CV_Assert(1 == src.channels());
src.convertTo(src, CV_32S);
int height = src.rows;
int width = src.cols;
int max_gray_level = 0;
for (int j = 0; j < height; j++)
{
int* srcdata = src.ptr(j);
for (int i = 0; i < width; i++)
{
if (srcdata[i] > max_gray_level)
{
max_gray_level = srcdata[i];
}
}
}
max_gray_level++;
if (max_gray_level > 16)
{
for (int i = 0; i < height; i++)//将图像的灰度级缩小至16级,减小灰度共生矩阵的大小。
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
srcdata[j] = (int)srcdata[j] / gray_level;
}
}
dst.create(gray_level, gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 1; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j - 1];
dst.ptr(rows)[cols]++;
}
}
}
else
{
dst.create(max_gray_level, max_gray_level, CV_32SC1);
dst = Scalar::all(0);
for (int i = 0; i < height - 1; i++)
{
int*srcdata = src.ptr(i);
int*srcdata1 = src.ptr(i + 1);
for (int j = 1; j < width; j++)
{
int rows = srcdata[j];
int cols = srcdata1[j - 1];
dst.ptr(rows)[cols]++;
}
}
}
}
// 【】第二步:计算纹理特征 // 特征值计算—— double& Asm, double& Con, double& Ent, double& Idm
void feature_computer(Mat&src, float& Asm, float& Con, float& Ent, float& Idm)//计算特征值
{
int height = src.rows;
int width = src.cols;
int total = 0;
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
for (int j = 0; j < width; j++)
{
total += srcdata[j];//求图像所有像素的灰度值的和
}
}
Mat copy;
copy.create(height, width, CV_64FC1);
for (int i = 0; i < height; i++)
{
int*srcdata = src.ptr(i);
float*copydata = copy.ptr(i);
for (int j = 0; j < width; j++)
{
copydata[j] = (float)srcdata[j] / (float)total;//图像每一个像素的的值除以像素总和
}
}
for (int i = 0; i < height; i++)
{
float*srcdata = copy.ptr(i);
for (int j = 0; j < width; j++)
{
Asm += srcdata[j] * srcdata[j]; //能量
if (srcdata[j]>0)
{
Ent -= srcdata[j] * log(srcdata[j]); //熵
}
Con += (float)(i - j)*(float)(i - j)*srcdata[j]; //对比度
Idm += srcdata[j] / (1 + (float)(i - j)*(float)(i - j)); //逆差矩
}
}
}
// 【】融合第一、二步
/*
Mat src_gray;
float data[16] = {0};
*/
void feature_glcm(Mat src_gray, float data[16])
{
Mat dst_0, dst_90, dst_45, dst_135;
getglcm_0(src_gray, dst_0);
float asm_0 = 0, con_0 = 0, ent_0 = 0, idm_0 = 0;
feature_computer(dst_0, asm_0, con_0, ent_0, idm_0);
getglcm_45(src_gray, dst_45);
float asm_45 = 0, con_45 = 0, ent_45 = 0, idm_45 = 0;
feature_computer(dst_45, asm_45, con_45, ent_45, idm_45);
getglcm_90(src_gray, dst_90);
float asm_90 = 0, con_90 = 0, ent_90 = 0, idm_90 = 0;
feature_computer(dst_90, asm_90, con_90, ent_90, idm_90);
getglcm_135(src_gray, dst_135);
float asm_135 = 0, con_135 = 0, ent_135 = 0, idm_135 = 0;
feature_computer(dst_135, asm_135, con_135, ent_135, idm_135);
float AMS[4] = { asm_0, asm_45, asm_90, asm_135 };
float COM[4] = { con_0, con_45, con_90, con_135 };
float ENT[4] = { ent_0, ent_45, ent_90, ent_135 };
float IDM[4] = { idm_0, idm_45, idm_90, idm_135 };
float glcm_data[16] = {
asm_0, asm_45, asm_90, asm_135,
con_0, con_45, con_90, con_135,
ent_0, ent_45, ent_90, ent_135,
idm_0, idm_45, idm_90, idm_135
};
/*std::cout << "特征数据:" << endl;*/
for (size_t i = 0; i < 16; i++)
{
data[i] = glcm_data[i];
//std::cout << data[i] << " ";
}
}
}; C++ vector操作
二维数组赋值给vector
vector复制给Mat
//训练需要用到的数据
float train_data[4][4] = {
{ 0.814973, 15.1147, 0.431797, 0.933121 },
{ 0.95266, 3.70758, 0.139839, 0.983595 },
{ 0.973312, 1.95185, 0.0861551, 0.991363 },
{ 0.922384, 6.42396, 0.211111, 0.971575 }
};
int labels[4] = {
1,
2,
3,
4
};
// 二维数组vector赋值
vector> vec;
for (size_t i = 0; i < 4; i++)
{
vector vec_rows;
for (size_t j = 0; j < 4; j++)
{
vec_rows.push_back(train_data[i][j]);
}
vec.push_back(vec_rows);
}
for (auto it = vec.begin(); it != vec.end(); ++it) // vector 行
{
cout << "wai" << endl;
for (auto it2 = it->begin(); it2 != it->end(); ++it2) // vector 列
{
cout << "nei" << endl;
cout << *it2 << endl;
}
}
// 二维vector转Mat
Mat result = Mat::zeros(vec.size(), 4, CV_32FC1);
MatIterator_ it = result.begin();
for (int i = 0; i < vec.size(); i++)
{
for (int j = 0; j < vec[0].size(); j++)
{
*it = vec[i][j];
it++;
}
} C++ io头文件进行zhi指定文件夹的文件名获取+文件个数返回
// 功能:获取文件名(files[i].c_str())和文件个数(files.size())
// #include
// using namespace std;
/*
char* filePath = ".\\resource";
vector files;
获取该路径下的所有文件
getFiles(filePath, files);
char str[30];
int size = files.size();//文件个数
for (int i = 0; i < size; i++)
{
cout << files[i].c_str() << endl;//文件名
}
*/
void getFiles(string path, vector& files)
{
//文件句柄
long hFile = 0;
//文件信息
struct _finddata_t fileinfo;
string p;
if ((hFile = _findfirst(p.assign(path).append("\\*").c_str(), &fileinfo)) != -1)
{
do
{
//如果是目录,迭代之
//如果不是,加入列表
if ((fileinfo.attrib & _A_SUBDIR))
{
if (strcmp(fileinfo.name, ".") != 0 && strcmp(fileinfo.name, "..") != 0)
getFiles(p.assign(path).append("\\").append(fileinfo.name), files);
}
else
{
files.push_back(p.assign(path).append("\\").append(fileinfo.name));
}
} while (_findnext(hFile, &fileinfo) == 0);
_findclose(hFile);
}
} C++ Opencv 样本多样性
不同的任务背景下, 我们可以通过图像的几何变换, 使用以下一种或多种组合数据增强变换来增加输入数据的量. 这里具体的方法都来自数字图像处理的内容, 相关的知识点介绍, 网上都有, 就不一一介绍了.
旋转 | 反射变换(Rotation/reflection): 随机旋转图像一定角度; 改变图像内容的朝向;
翻转变换(flip): 沿着水平或者垂直方向翻转图像;
缩放变换(zoom): 按照一定的比例放大或者缩小图像;
平移变换(shift): 在图像平面上对图像以一定方式进行平移;
可以采用随机或人为定义的方式指定平移范围和平移步长, 沿水平或竖直方向进行平移. 改变图像内容的位置;
尺度变换(scale): 对图像按照指定的尺度因子, 进行放大或缩小; 或者参照SIFT特征提取思想, 利用指定的尺度因子对图像滤波构造尺度空间. 改变图像内容的大小或模糊程度;
对比度变换(contrast): 在图像的HSV颜色空间,改变饱和度S和V亮度分量,保持色调H不变. 对每个像素的S和V分量进行指数运算(指数因子在0.25到4之间), 增加光照变化;
噪声扰动(noise): 对图像的每个像素RGB进行随机扰动, 常用的噪声模式是椒盐噪声和高斯噪声;
颜色变换(color): 在训练集像素值的RGB颜色空间进行PCA, 得到RGB空间的3个主方向向量,3个特征值, p1, p2, p3, λ1, λ2, λ3. 对每幅图像的每个像素