Canny边缘检测方法中的非极大抑制
什么是非极大抑制
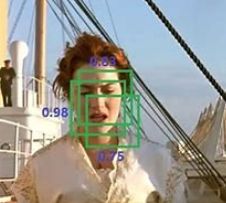
在目标检测中,通常会使用各种各样的方法来让计算机找到目标的所在位置,然而,计算机的输出往往并不是单一的,也就是说,一个目标可能会输出多个结果(如下图所示),这些结果有好有坏,因此就需要使用非极大抑制的方法来筛选出最优结果,说白了也就是一个剔除冗余的过程。
非极大值抑制(Non-Maximum Suppress,NMS)算法,其核心思想在于抑制非极大值的目标(去冗余),从而搜索出局部极大值的目标(找最优)。由于不同的目标框有不同的表示方式,因此NMS算法也具有不同的变体,本文通过目标检测的非极大抑制引入,简单讲述非极大抑制的思想以及其在边缘检测上的应用。
目标检测中的非极大抑制算法实现
(1)假设有n个候选预测框,将所有可能的预测框按类别划分n个集合,把整张图片也加入到集合当中,使得集合中存在n+1个元素
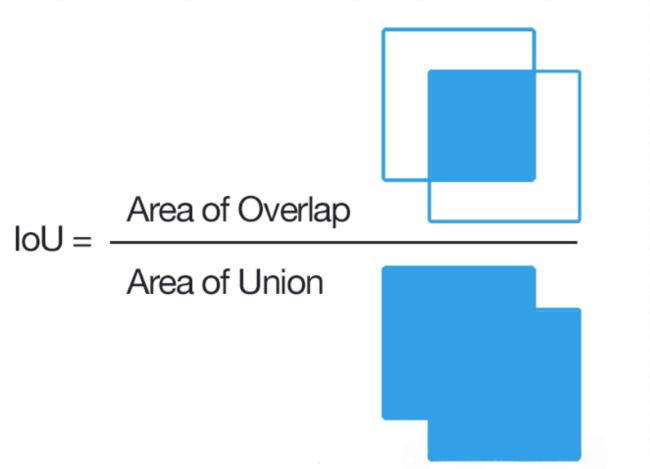
(2)用置信度最高的元素分别与其余元素之间计算IoU,如果IoU大于给定阈值,则将置信度较低的元素排除,保留置信度较高的元素。
IoU是两个区域重叠的部分除以两个区域的集合部分得出的结果,通过设定的阈值,与这个IoU计算结果比较。这里借用网络上的一张图片来帮助大家理解
(3)重复上述步骤,直到找出最优解为止。
非极大抑制在边缘检测中有什么作用
利用sobel算子可以计算图像梯度的幅值和方向,Sobel算子分为X方向和Y方向,表达如下
S x = [ − 1 0 1 − 2 0 2 − 1 0 1 ] S_x = \begin{bmatrix} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \end{bmatrix} Sx= −1−2−1000121
S y = [ − 1 − 2 − 1 0 0 0 1 2 1 ] S_y = \begin{bmatrix} -1 & -2 & -1 \\ 0 & 0 & 0 \\ 1 & 2 & 1 \end{bmatrix} Sy= −101−202−101
直接利用两个边缘检测卷积核,分别对图像进行边缘提取后再叠加,即可初步得到边缘图像。使用改算子进行卷积前,需要先将图像转化为单通道的灰度图。MATLAB代码如下:
conv1 = [1 0 -1
2 0 -2
1 0 -1];
conv2 = [1 2 1
0 0 0
-1 -2 -1];
% 也可以直接写成表达式
% 其中I为目标图像对应的二值图像
R=zeros(m,n);
for xi=2:1:m-1
for yi = 2:1:n-1
R(xi,yi)=abs(I(xi+1,yi+1)+2*I(xi,yi+1)+I(xi-1,yi+1)-I(xi-1,yi-1)-2*I(xi,yi-1)-I(xi+1,yi-1))+abs(I(xi-1,yi-1)+2*I(xi-1,yi)+I(xi-1,yi+1)-I(xi+1,yi+1)-2*I(xi+1,yi)-I(xi+1,yi-1));
end
end
做完这一步后,我们会发现,检测出来的边缘像素点有许多冗余,也就是同一个边缘可能检测了两条、三条甚至更多条。因此,我们就需要使用非极大抑制的方法来消除冗余,此处可参考J.Canny发表的论文
梯度方向上的非极大抑制
接下来进入本文的正题,
在John Canny提出的Canny算子的论文中,非最大值抑制就只是在0、90、45、135四个梯度方向上进行的,每个像素点梯度方向按照相近程度用这四个方向来代替。这四种情况也代表着四种不同的梯度,即
G y > G x G_y > G_x Gy>Gx,且两者同号
G y > G x G_y > G_x Gy>Gx,且两者异号
G y < G x G_y < G_x Gy<Gx,且两者同号
G y < G x G_y < G_x Gy<Gx,且两者异号

如上图所示,根据X方向和Y方向梯度的大小可以判断A点是靠近X轴还是Y轴,通过A1和A2的像素值则可计算A点的亚像素值,B点同理,不再赘述。上面两图为靠近Y轴的梯度大,下面两图为靠近X轴的像素大。
由于A、B两点的位置是通过梯度来确定的,那么A、B两点的梯度值也可以根据Q点的梯度计算,因此假设Q点在四个方向上的梯度分别为 G 1 、 G 2 、 G 3 、 G 4 G_{1}、G_{2}、G_{3}、G_{4} G1、G2、G3、G4。下面我们分情况来讨论
- 首先讨论 G y > G x G_y > G_x Gy>Gx的情况,此时
w = G x G y w = \frac{G_x}{G_y} w=GyGx
G 2 = G ( i − 1 , j ) G_2 = G(i-1, j) G2=G(i−1,j)
G 4 = G ( i + 1 , j ) G_4 = G(i+1, j) G4=G(i+1,j)
如果两者同号,则
G 1 = G ( i − 1 , i − 1 ) G_1 = G(i-1,i-1) G1=G(i−1,i−1)
G 3 = G ( i + 1 , i + 1 ) G_3 = G(i+1,i+1) G3=G(i+1,i+1)
否则
G 1 = G ( i − 1 , i + 1 ) G_1 = G(i-1,i+1) G1=G(i−1,i+1)
G 3 = G ( i + 1 , i − 1 ) G_3 = G(i+1,i-1) G3=G(i+1,i−1)
- 然后是 G y < G x G_y < G_x Gy<Gx的情况
w = G y G x w = \frac{G_y}{G_x} w=GxGy
G 2 = G ( i , j − 1 ) G_2 = G(i, j-1) G2=G(i,j−1)
G 4 = G ( i , j + 1 ) G_4 = G(i, j+1) G4=G(i,j+1)
如果两者同号
G 1 = G ( i + 1 , i − 1 ) G_1 = G(i+1,i-1) G1=G(i+1,i−1)
G 3 = G ( i − 1 , i + 1 ) G_3 = G(i-1,i+1) G3=G(i−1,i+1)
否则
G 1 = G ( i − 1 , i − 1 ) G_1 = G(i-1,i-1) G1=G(i−1,i−1)
G 3 = G ( i + 1 , i + 1 ) G_3 = G(i+1,i+1) G3=G(i+1,i+1)
如此便可以计算出两个相邻亚像素点的梯度值
g A = w ∗ G 1 + ( 1 − w ) ∗ G 2 g_A = w*G_{1} + (1-w)*G_2 gA=w∗G1+(1−w)∗G2
g B = w ∗ G 3 + ( 1 − w ) ∗ G 4 g_B = w*G_{3} + (1-w)*G_4 gB=w∗G3+(1−w)∗G4
比较三者的像素值,如果Q点像素值大于其余两者,则保留Q点作为边缘上的点,否则认为Q点为冗余点。
参考链接
(36条消息) 非极大值抑制算法详解_武乐乐~的博客-CSDN博客_非极大值抑制算法
(36条消息) Canny算子中的非极大值抑制(Non-Maximum Suppression)分析_Belial_2010的博客-CSDN博客_canny算子非极大值抑制
(36条消息) Canny边缘检测Step3——梯度幅值的非极大值抑制(NMS)详解_Polaris_T的博客-CSDN博客_canny 非极大值抑制