AUV直线路径跟踪仿真-反步滑模方法
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
文章目录
前言
一、整体思路
二、控制器设计
1.纵向推力-反步法
2.转艏力矩-滑模方法
三、虚拟AUV速度推算
四、仿真实现
1.艏向制导误差和滑模面函数
2.控制器和模型解算
3.解耦速度得到艏向角和漂角
4.积分速度得到位置信息
5.得到位置误差和趋近角信息
6.海流干扰
7.可视化
1.位置误差
2.期望路径
3.控制力
五、仿真结果分析
前言
本文进行AUV水平面的直线路径跟踪的控制设计和simulink的仿真搭建。
提示:以下是本篇文章正文内容,下面案例可供参考
一、整体思路
将整个AUV系统进行解耦,将直线路径跟踪问题转化为对AUV速度和艏向角的控制,并分别设计控制器,其中,纵向速度控制时运用反步法进行控制器设计,艏向角控制则利用滑模方法。在本文中,所涉及的AUV含有主推和垂直舵,属于欠驱动,缺少横向输入。
二、控制器设计
1.纵向推力-反步法
期望速度![]() ,根据反步法原理进行设计,具体参考:
,根据反步法原理进行设计,具体参考:
AUV控制中的反步法_工程湛湛的博客-CSDN博客
得到的控制力应当为:
![]()
为进一步增强控制性能,结合李雅普诺夫函数的一阶导小于零的要求,在控制率中引入了有利于控制的非线性项:
![]()
则纵向推力重新变为:
![]()
2.转艏力矩-滑模方法
在进行转艏力矩的设计之前,需要先了解两个知识点,一个是Serret-Frenet坐标系,另一个是视线法。参考:
基于Serret-Frenet坐标系下的跟踪误差方程_工程湛湛的博客-CSDN博客
AUV路径跟踪视线法(Line Of Sight)制导原理_工程湛湛的博客-CSDN博客
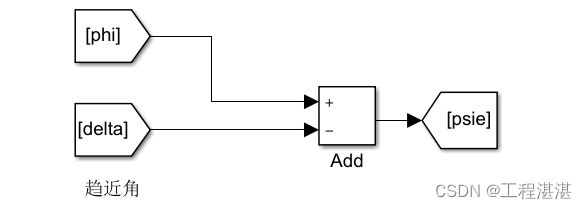
根据AUV视线法的制导原理,需要AUV的航迹角与SF坐标系与定系夹角的差值向趋近角趋近,此时我们定义趋近误差为:
![]()
通过滑模方法进行转艏力矩控制器设计的过程参考:
滑模方法设计AUV路径跟踪转艏力矩_工程湛湛的博客-CSDN博客
最后得到的控制率为:
![]()
至此,便得到了纵向推力和转艏力矩的控制率。
三、虚拟AUV速度推算
参考:虚拟向导AUV的速度推算_工程湛湛的博客-CSDN博客
得到的三维虚拟向导速度为:
![]()
结合水平面的特点,![]() ,则:
,则:
![]()
根据输入,在Simulink中得到s的一阶导:
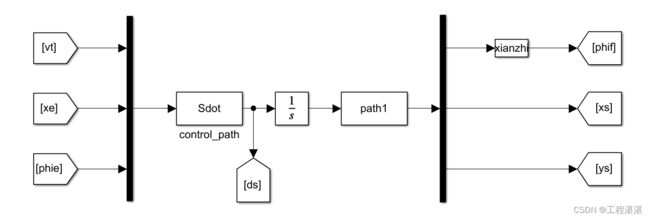
上式中phie为定系与SF坐标系的夹角:

随后在path1的s函数中定义所要跟踪的期望路径,输出期望路径的SF坐标系与定系的夹角和横向期望路径和纵向期望路径信息。
四、仿真实现
以下按照笔者思路,进行整个Simulink仿真程序的复现。
1.艏向制导误差和滑模面函数
首先得到AUV的航迹角和SF坐标系与定系的夹角:
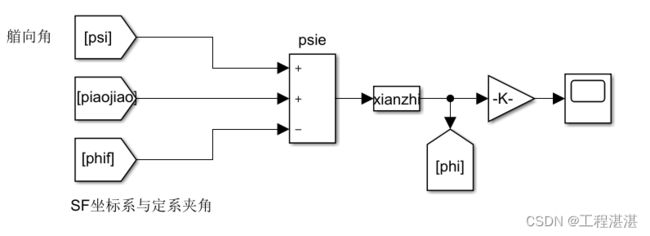
得到phi角,通过该角对趋近角的趋近即可完成AUV的制导,因此得到的误差角为:
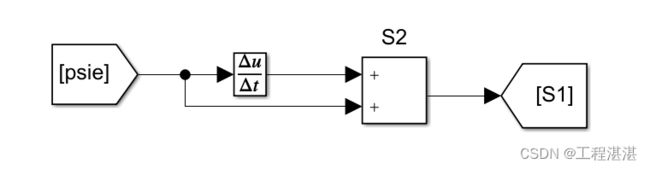
根据误差得到的滑模面函数为:
2.控制器和模型解算
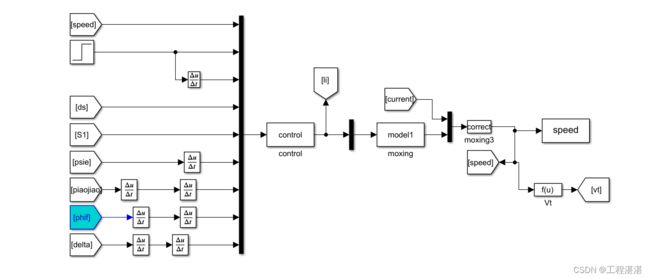
根据所设计的纵向推力和转艏力矩,设计一系列的输入,得到控制力的输出:

得到控制力后输入到AUV的水平面动力学模型进行解算,从而得到AUV的速度信息,水平面的模型表示为:
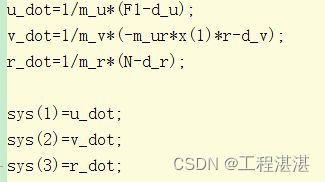
仿真中current为海流干扰,通过相对速度对AUV的速度进行修正,即correct,最后输出AUV的纵向速度、横向速度和转艏角速度,并计算出AUV的和速度vt。
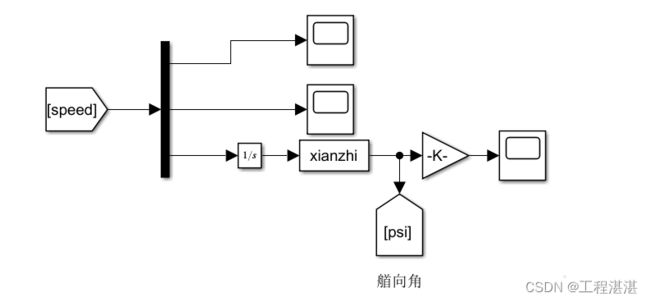
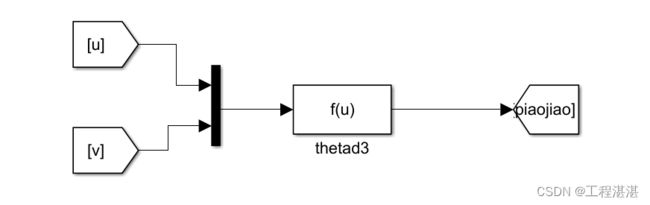
3.解耦速度得到艏向角和漂角
对模型解算得到的速度信息解耦,计算得到艏向角信息:
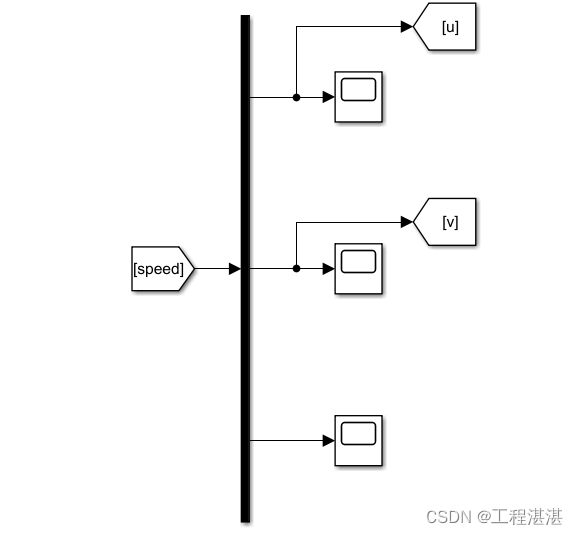
由横向速度和纵向速度得到漂角信息:
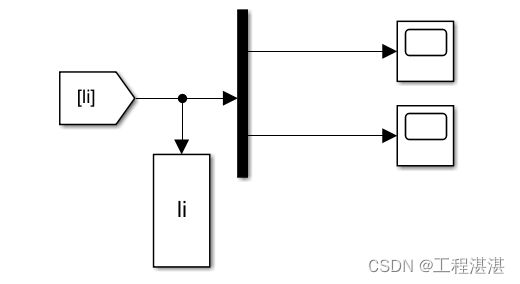
4.积分速度得到位置信息
对得到的速度信息进行积分处理,同时设置位置的初始值,便可得到AUV的实时位置信息:
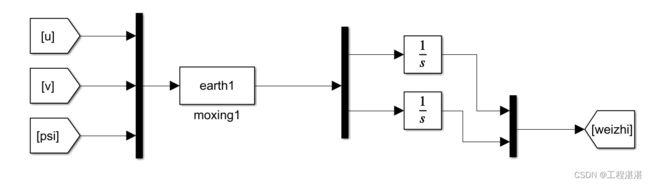
在积分器中进行初始值的设置。
5.得到位置误差和趋近角信息
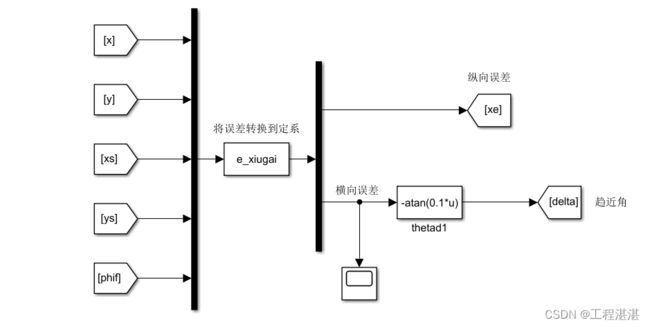
通过得到对速度积分得到的实时位置信息,以及SF坐标系得到的期望路径信息,做差得到误差信息,再通过坐标变换将误差转换到定系,转换角为phif,在得到横向误差之后计算得到趋近角。
6.海流干扰
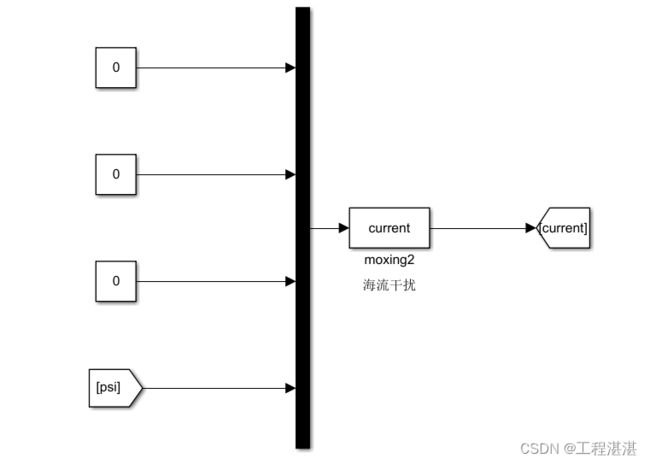
通过设置AUV在定系中的速度,然后通过艏向角将速度转换到动系,便得到了在动系下的海流速度信息,和AUV速度进行做差,便得到了AUV相对海流的相对速度。
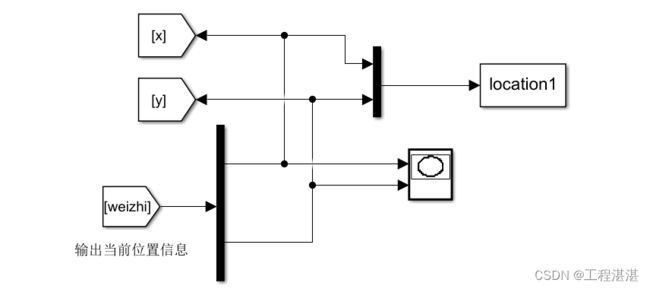
7.可视化
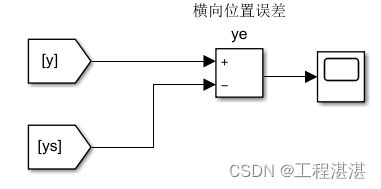
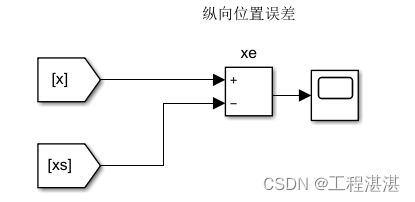
1.位置误差
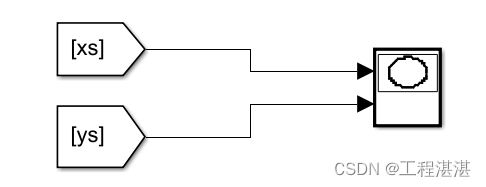
2.期望路径
3.控制力
五、仿真结果分析
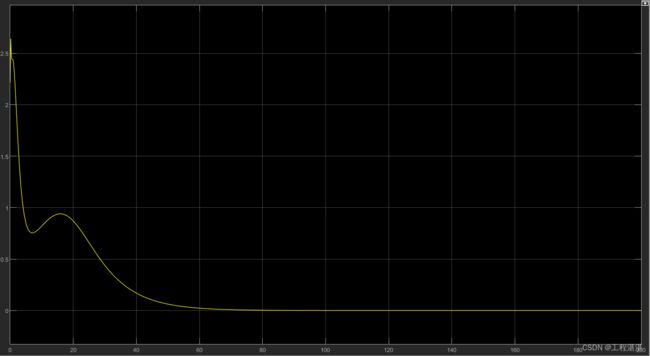
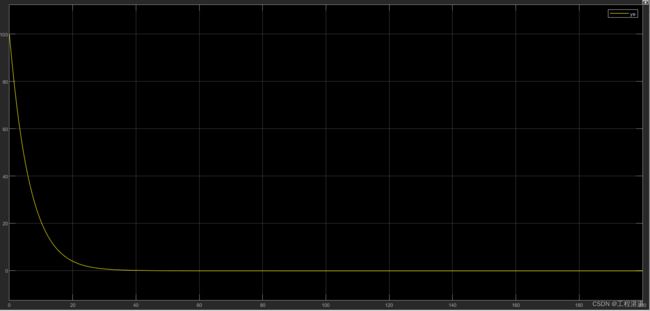
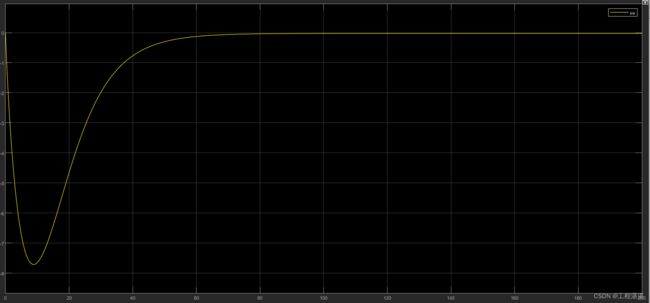
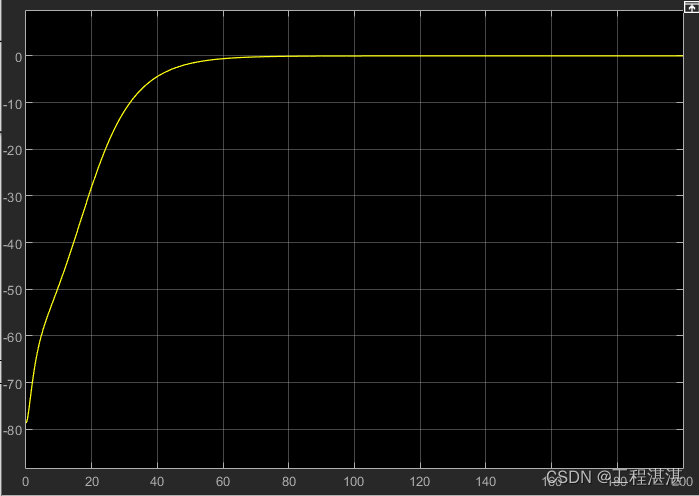
搭建完后设置仿真时间为200s运行,得到的仿真结果。
纵向速度:

横向速度:
艏向角速度:
纵向推力:
转艏力矩:
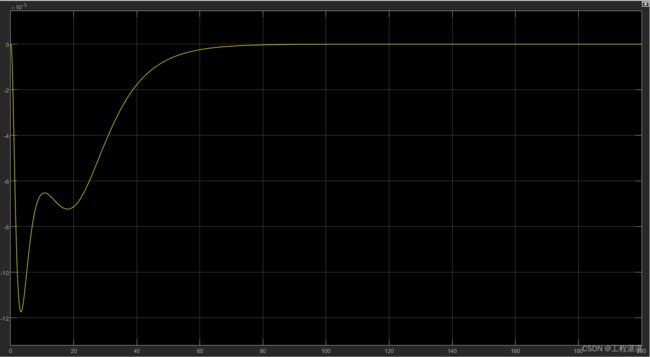
横向位置误差:
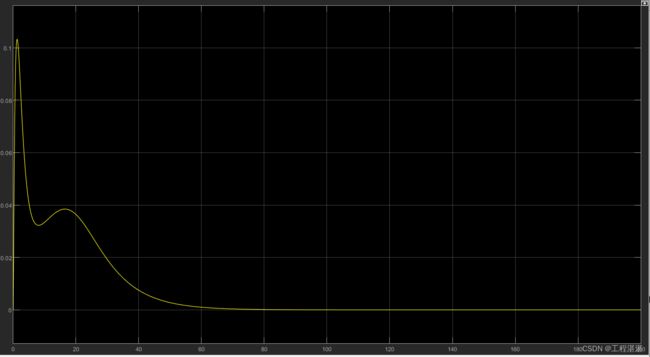
纵向位置误差:
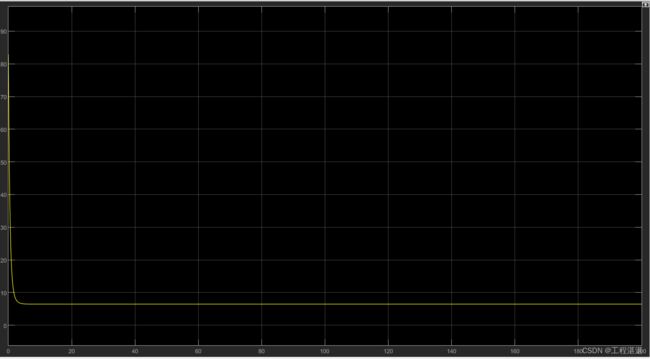
制导误差角信息:
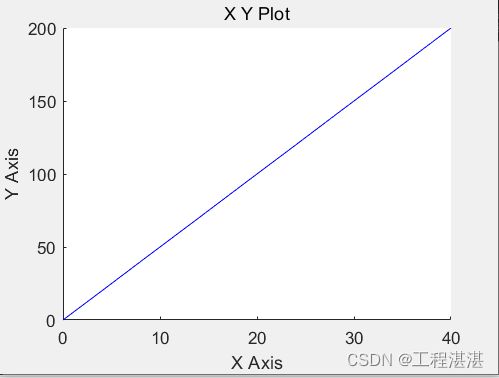
期望路径二维图:
AUV位置二维图像:
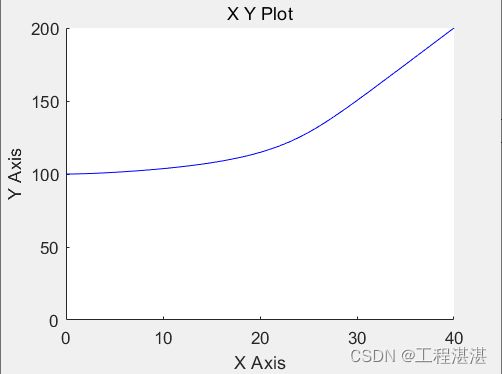
从仿真结果来看,AUV的跟踪效果良好,说明了所设计控制器的有效性。