tof相机开发笔记
最近帮老师做tof相机的项目,甲方提供的代码可以实现图片数据的获取,要求在此基础上,能够通过ros平台实现slam导航、点云地图的构建、拍照等功能。
一、深度图获取
1、文件编译
1.1编译方式的配置
快捷键 ctrl + shift + B 调用编译,选择:catkin_make:build
可以点击配置设置为默认,修改.vscode/tasks.json 文件
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
配置好后,快捷键 ctrl + shift + B可快速编译。
1.2glibc库安装与glibc++升级
出现的问题(如图)
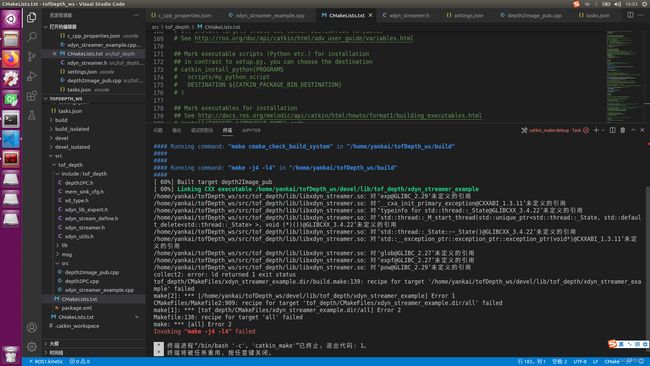
可以看到,其中的主要问题是GLIBCXX库和GLIBC库版本过低。查看这两个库的版本。
首先明确两个库的位置
GLIBCXX /usr/lib/x86_64-linux-gnu/libstdc++.so.6
GLIBC /lib/x86_64-linux-gnu/libm.so.6没有升级前,libstdc++版本为6.0.21(对应LIBCXX3.4.21),libsm版本为2.23(已经升级了,没有截图)
查看库版本升级后的版本,libstdc++版本为6.0.28(对应LIBCXX3.4.28)),这个时候包含了3.4.22,也就解决了3.4.22没有定义的问题。
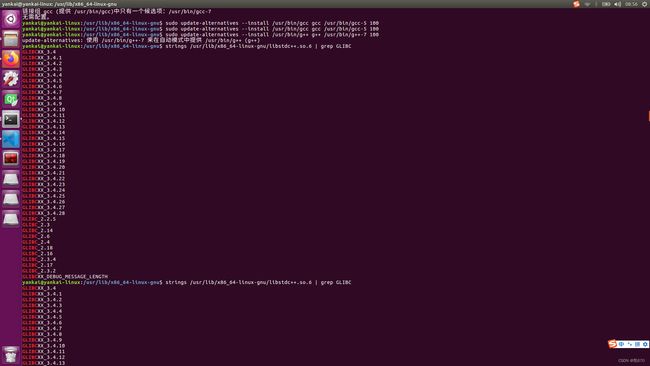
libstdc++库版本的升级是通过升级gcc和g++的版本升级的。均从5.4.0升级到7.5.0的版本,安装完成后,libstdc++也就升级了。
下面是安装方法:
ubuntu16.04安装gcc g++7.5.0及各个版本的切换_8BitCat的博客-CSDN博客
同理,libcm库文件也需要升级到2.29及以上版本。
下面是升级方法
ImportError: /lib/x86_64-linux-gnu/libm.so.6: version `GLIBC_2.29‘ not found_ppipp1109的博客-CSDN博客
安装对应的glibc库
注意:为了规范,不同的是,其中创建build文件夹,在build文件夹中进行下面的操作,指定安装目录,其中必须要有configure文件才可以使用下面的指令,否则会出现无此文件的显示。
../configure --prefix=/usr/local/glibc在执行make -j8之前,输入下面的指令bison是一种解析器生成器,如果不安装,make -j8无效
sudo apt-get install bison升级后:

还是有两处小问题。其中的‘__strtof128_nan@GLIBC_PRIVATE’未定义的引用,我发现libm.so.6中的是“__strtof128_nan@@GLIBC_PRIVATE”,而对‘glob@GLIBC_2.27’未定义的引用,我已经向libm.so.6链接到2.29版本,出现这种情况,我也是不能理解的,计划再次升级版本。
1.3小结
yankai@yankai-linux:/usr/lib/x86_64-linux-gnu$ ls -l libstdc++.so.6
lrwxrwxrwx 1 root root 19 6月 3 2021 libstdc++.so.6 -> libstdc++.so.6.0.28
yankai@yankai-linux:/lib/x86_64-linux-gnu$ ls -l libm.so.6
lrwxrwxrwx 1 root root 33 11月 30 17:32 libm.so.6 -> /usr/local/glibc/lib/libm-2.29.so
ls -l 库文件,该指令可以查看库文件链接的库版本。
yankai@yankai-linux:/lib/x86_64-linux-gnu$ sudo ln -sf /usr/local/glibc/lib/libm-2.29.so libm.so.6
yankai@yankai-linux:/lib/x86_64-linux-gnu$ ls -l libm.so.6
lrwxrwxrwx 1 root root 33 11月 30 18:45 libm.so.6 -> /usr/local/glibc/lib/libm-2.29.so
ln -sf 需要链接的库版本 目标库,该指令可链接库文件,用来更新库版本。
yankai@yankai-linux:/usr/lib/x86_64-linux-gnu$ sudo find / -name "libstdc++.so.6*"
[sudo] yankai 的密码:
/usr/lib/x86_64-linux-gnu/libstdc++.so.6.0.28
/usr/lib/x86_64-linux-gnu/libstdc++.so.6
/usr/share/gdb/auto-load/usr/lib/x86_64-linux-gnu/libstdc++.so.6.0.28-gdb.py
find: `/run/user/1000/doc': 权限不够
find: `/run/user/1000/gvfs': 权限不够
/home/yankai/qt/QtAndorid/environment/android-studio/bin/lldb/lib/libstdc++.so.6
/home/yankai/qt/QtAndorid/environment/android-sdk-linux/tools/lib/libstdc++/libstdc++.so.6
/home/yankai/qt/QtAndorid/environment/android-sdk-linux/tools/lib/libstdc++/libstdc++.so.6.0.18
/home/yankai/qt/QtAndorid/environment/android-sdk-linux/tools/lib64/libstdc++/libstdc++.so.6
/home/yankai/qt/QtAndorid/environment/android-sdk-linux/tools/lib64/libstdc++/libstdc++.so.6.0.18
sudo find / -name "文件名",可以全局搜索文件的位置,用这个搜索到库,再进行一些列操作。
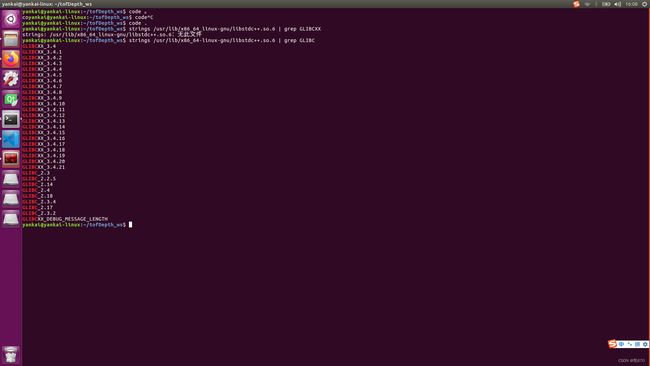
yankai@yankai-linux:/usr/lib/x86_64-linux-gnu$ strings /usr/lib/x86_64-linux-gnu/libstdc++.so.6 | grep GLIBC
GLIBCXX_3.4
GLIBCXX_3.4.1
GLIBCXX_3.4.2
GLIBCXX_3.4.3
GLIBCXX_3.4.4
GLIBCXX_3.4.5
GLIBCXX_3.4.6
GLIBCXX_3.4.7
GLIBCXX_3.4.8
GLIBCXX_3.4.9
GLIBCXX_3.4.10
GLIBCXX_3.4.11
GLIBCXX_3.4.12
GLIBCXX_3.4.13
GLIBCXX_3.4.14
GLIBCXX_3.4.15
GLIBCXX_3.4.16
GLIBCXX_3.4.17
GLIBCXX_3.4.18
GLIBCXX_3.4.19
GLIBCXX_3.4.20
GLIBCXX_3.4.21
GLIBCXX_3.4.22
GLIBCXX_3.4.23
GLIBCXX_3.4.24
GLIBCXX_3.4.25
GLIBCXX_3.4.26
GLIBCXX_3.4.27
GLIBCXX_3.4.28
GLIBC_2.2.5
GLIBC_2.3
GLIBC_2.14
GLIBC_2.6
GLIBC_2.4
GLIBC_2.18
GLIBC_2.16
GLIBC_2.3.4
GLIBC_2.17
GLIBC_2.3.2
GLIBCXX_DEBUG_MESSAGE_LENGTH
strings 文件名 | grep 想要寻找的字符,管道的使用。可以快速找到文件中的字符,这个帮助快速定位libstdc++库中GLIBCXX的版本。
../configure --prefix=/usr/local/glibc编译前,在build文件夹中,设置安装路径,这个是glibc2.29库的安装路径。
ps:以上是在ubantu16.04下,并未完成编译,在ubantu18.04下,只是将glibc升级到2.29后,就编译成功了,下面的内容都是在编译成功后进行的。
2、相机的连接
相机与电脑通过网线连接,通过ip进行通信,这个时候需要注意,要想相机和电脑进行通信,那么它们的ip必须在同一个频段。通过软件查阅到了相机的ip为192.168.31.3。这个时候我们要将与相机连接的网卡ip设置为192.168.31.1~255中的一个ip。
2.1查看网卡信息
指令ifconfig
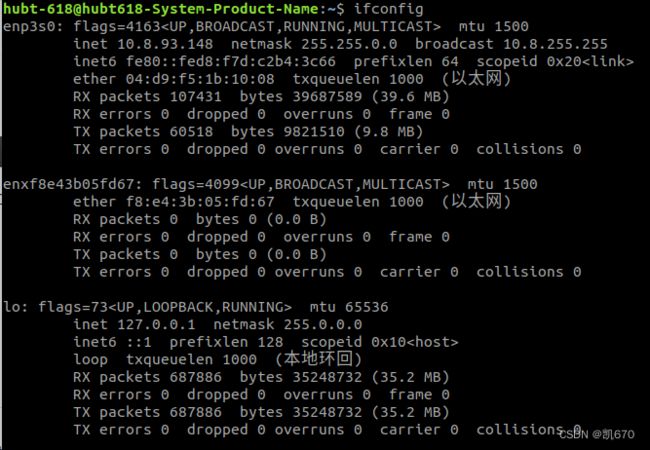
enp3s0为电脑中的网卡,enxf8e43b05fd67为网口转usb的设备,也是一个网卡。
这里相机是与第二个网卡连接在一起的,因此需要修改第二个网卡的ip
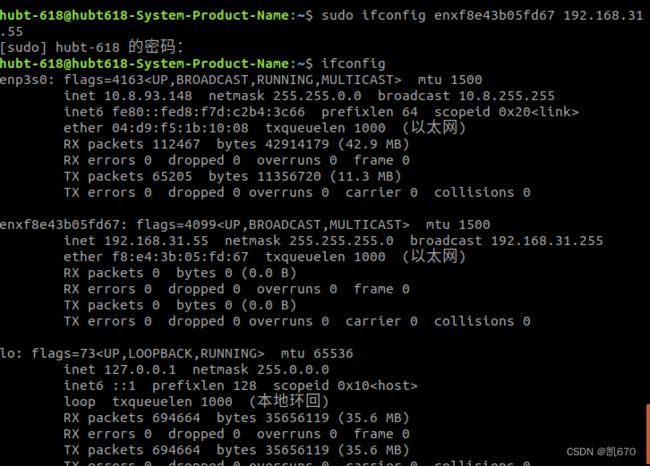
修改后,可以看到inet为 192.168.31.55,此时则可以运行程序,建立连接。
2.2小结
ip通信需要在同一个频段下
ifconfig,查看网卡信息
sudo ifconfig 网卡名 ip,则可以修改网卡的指定ip
注意:拔掉网口后再插入,通过ifconfig可以看到,设定的ip初始化了,因此需要重新设置ip。
3、代码解析
3.1基本思路
解析代码的目的是获得深度图信息,然后再在rviz中显示,通过rviz中Image订阅的信息类型为sensor_msg::Image,因此,首先查阅该信息中包含的内容。
使用指令 rosmsg info sensor_msg/Isensor_msgs::Image。
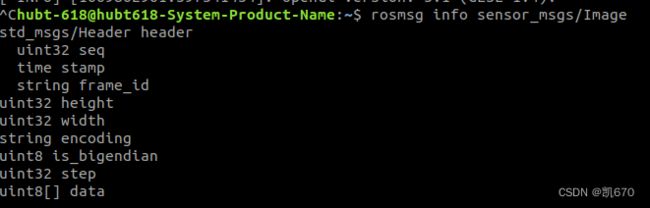
基本思路:现在就是要在代码中发布获取这个msg的所需要的信息,并将其通过一个topic发布出来,并由rivz订阅显示深度图。
3.2修改代码
由于对该相机的流程并不熟悉,因此再它所给的example中,对代码进行修改,其中主要是代码的添加。
example中,给了相机的整个流程框架,这个先不深究。
代码主要是在StreamCB回调函数进行修改的,该函数在每获取一帧图像时就会被调用一次,因此在这个函数中可以实时获取信息、发布topic。
void StreamCB(void *handle, MemSinkCfg *cfg, XdynFrame_t *data)
{
UserHandler *user = (UserHandler *)handle;
static ros::NodeHandle n;
static ros::Publisher publisher = n.advertise("tof_info", 100);
static sensor_msgs::Image tof_info;
// wo can do some user handler
// warnning : 这个回调函数内部不适合做耗时很大的操作,请注意
printf("get stream data: ");
//检查图像类型
for(int i = 0; i < MEM_AGENT_SINK_MAX; i ++){
printf("[%d:%d] ", i, cfg->isUsed[i]);
}
printf("\n");
for(int i = 0; i < MEM_AGENT_SINK_MAX; i ++){
if(cfg->isUsed[i] && data[i].addr){
if(i == MEM_AGENT_SINK_DEPTH){
SaveImageData_depth(data[i].addr, data[i].size, 100);
if(data[i].ex){
XdynDepthFrameInfo_t *depthInfo = (XdynDepthFrameInfo_t *)data[i].ex;
//信息发布
tof_info.header.seq = 1;
tof_info.header.stamp = ros::Time::now();
tof_info.header.frame_id = "tof_info";
//图片长、宽、类型、数据储存方式、每行字节长度
tof_info.width = depthInfo->frameInfo.width;
tof_info.height = depthInfo->frameInfo.height;
tof_info.encoding = "mono16";//图片类型为16UC1
tof_info.is_bigendian = 0;//图片是否是大端储存方式,0-不是
tof_info.step = 2 *depthInfo->frameInfo.width;//图片的步长
float funitofdepth = depthInfo->fUnitOfDepth;
uint16_t *depth = (uint16_t *)data[i].addr;//数据类型强制转换
//深度信息的获取
for(int j = 0; j < data[i].size / 2; j++)
{
uint16_t depth_ = depth[j] * funitofdepth;
//将16位的数据换成8位的进行储存
tof_info.data.push_back(depth_);
tof_info.data.push_back(depth_ >> 8);
//注意数组与容器的区别
// tof_info.data[j * 2] = depth_;
// tof_info.data[j * 2 + 1] = depth_ >> 8;
}
publisher.publish(tof_info);
printf("data_size %d: %d funitofdepth %f \n", i, tof_info.data.size(), funitofdepth);
tof_info.data.clear();
// printf("depth image : height = %d, width = %d, format = %d, index = %d, rs_tx = %d, tx_us = %d, temp01 = %d \n",
// depthInfo->frameInfo.height, depthInfo->frameInfo.width, depthInfo->frameInfo.format,
// depthInfo->frameInfo.rx_ts, depthInfo->frameInfo.tx_us, depthInfo->frameInfo.temp0);
// if(!user->pcConver.IsInit()){
// MemSinkInfo info;
// user->stream->GetResolution(info);
// user->pcConver.Init(info, depthInfo->fUnitOfDepth, depthInfo->fLensParas);
// user->imgSize = info.width * info.height;
// user->pcAttr = (PCPoint_t *)calloc(1, info.width * info.height * sizeof(PCPoint_t));
// }
// // 将深度转化为点云
user->pcConver.Depth2PC((uint16_t *)data[i].addr, user->pcAttr);
// // 保存点云
// SaveImageData_pointcloud(user->pcAttr, user->imgSize * sizeof(PCPoint_t));
// printf("get depth size [%d], fUnitOfDepth = %f, hz[%f, %f]\n",
// data[i].size, depthInfo->fUnitOfDepth, depthInfo->fModFreqMHZ[0], depthInfo->fModFreqMHZ[1]);
}
}else if(i == MEM_AGENT_SINK_POINT_CLOUD){
SaveImageData_pointcloud(data[i].addr, data[i].size);
//SavePointCloud_ply(memData[i].addr, memData[i].size);
printf("get point cloud size [%d]\n", data[i].size);
}else if(i == MEM_AGENT_SINK_GRAY){
printf("get gray size [%d]\n", data[i].size);
SaveImageData_gray(data[i].addr, data[i].size);
}else if(i == MEM_AGENT_SINK_CONFID){
printf("get confid size [%d]\n", data[i].size);
SaveImageData_amp(data[i].addr, data[i].size);
}
}
}
}
这个是该函数的所有内容,我在其中添加的就是信息的发布这一段。
其中注意数据类型的强制转换、16位数据如何以8位的形式储存、大段与小段字节数据、数组与容器之间的区别。
数据类型的强制转换
16位数据如何以8位的形式储存
uint8_t,uint16_t,uint64_t 相互转换_Hanyang Li的博客-CSDN博客_uint8转uint16
大段与小段字节数据
大端与小端字节数据详解_dosthing的博客-CSDN博客_大端数据和小端数据
数组与容器之间的区别
ch1_1 c++中的 数组array 与 容器vector_mingqian_chu的博客-CSDN博客_c++中容器中保存数组
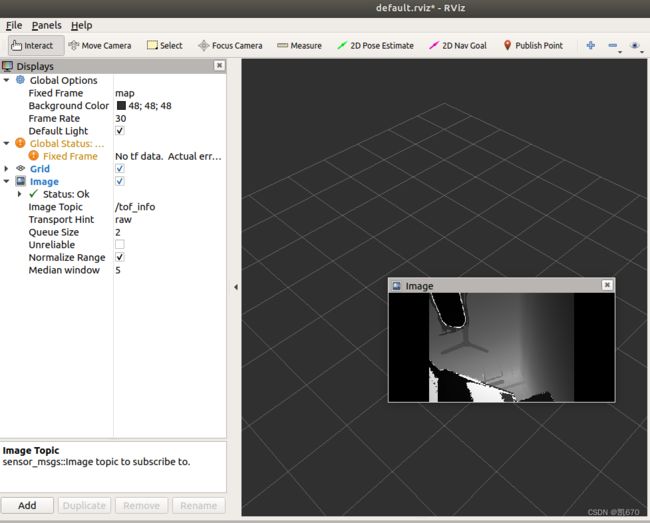
3.3深度图显示
代码修改完毕,连接到相机后,发布sensor_msgs::Image信息,启动rviz接收后,效果如下图:
二、图片镜像
1.灰度图的获取
灰度图的获取方式和深度图是一样的,由于不需要作数据类型转换,获取灰度图的代码更加简单,依然是发布话题sensor_msgs::Image,然后在rivz中获取信息即可得到。.
XdynFrameInfo_t *grayInfo = (XdynFrameInfo_t*)data[i].ex;
tof_info_gray.header.seq = 1;
tof_info_gray.header.stamp = ros::Time::now();
tof_info_gray.header.frame_id = "tof_info_gray";
tof_info_gray.width = 320;
tof_info_gray.height =240;
tof_info_gray.encoding = "mono16";
tof_info_gray.is_bigendian = 0;
tof_info_gray.step = 2 * 320;
uint8_t *gray = (uint8_t *)data[i].addr;
// printf("gray_width = %d, gray_height = %d\n",grayInfo->width, grayInfo->height);
uint16_t *gray_ = (uint16_t *)data[i].addr;
for(int j = 0; j < data[i].size; j++)
{
tof_info_gray.data.push_back(gray[j]);
}
pub_gray.publish(tof_info_gray);
printf("get gray size [%d]\n", tof_info_gray.data.size());
tof_info_gray.data.clear();2.图片镜像
在获取到深度图以及灰度图后,发现获取的图像存在镜像问题,只有将图片镜像后才能获取正常的图片。
2.1自己写代码
自己花了一上午写了代码,主要思路是将每一行的像素反过来,这样就可以实现镜像,但是事实证明我想的太简单了,根本就不是想要的效果。
2.2使用opencv镜像
考虑到opencv中可以使用镜像,因此使用opencv来进行镜像
2.2.1安装opencv
参考以下博客安装
ubuntu18.04安装opencv4.5.4_赵fefe的博客-CSDN博客_ubuntu安装opencv4.5
2.2.2配置opencv库
在CMakeLists.txt文件中添加以下代码,寻找opencv库,并链接opencv库
#寻找opencv头文件
find_package(OpenCV REQUIRED)
include_directories(include ${OpenCV_INCLUDE_DIRS})
...
target_link_libraries(xdyn_streamer_example
${catkin_LIBRARIES}
libxdyn_streamer.so
${OpenCV_LIBRARIES}
)
target_link_libraries(imgMir
${catkin_LIBRARIES}
libxdyn_streamer.so
${OpenCV_LIBRARIES}
)2.2.3镜像代码
#include "ros/ros.h"
#include "sensor_msgs/Image.h"
#include "sensor_msgs/PointCloud2.h"
#include "opencv2/opencv.hpp"
#include "cv_bridge/cv_bridge.h"
#include "cv_bridge/rgb_colors.h"
#include "pcl_conversions/pcl_conversions.h"
#include "pcl/io/pcd_io.h"
#include "pcl/point_types.h"
#include "pcl/visualization/cloud_viewer.h"
#include "pcl/common/transforms.h"
#include "pcl/visualization/cloud_viewer.h"
using namespace cv;
void operInfo_gray(const sensor_msgs::Image::ConstPtr& tof_info_gray){
ROS_INFO("灰度图的长度为%d, 宽度为%d \n", tof_info_gray->height, tof_info_gray->width );
static ros::NodeHandle n;
static ros::Publisher publisher = n.advertise("gray_image", 100);
static sensor_msgs::Image image;
cv_bridge::CvImagePtr gray_pty;
gray_pty = cv_bridge::toCvCopy(tof_info_gray, sensor_msgs::image_encodings::TYPE_16UC1);
cv::Mat gray_img = gray_pty->image;
printf("img.row:%d, img.col:%d", gray_img.rows, gray_img.cols);
flip(gray_img, gray_img, 1);//沿着y轴对称
sensor_msgs::ImagePtr msg = cv_bridge::CvImage(tof_info_gray->header, "mono16", gray_img).toImageMsg();
publisher.publish(msg);
}
void operInfo_depth(const sensor_msgs::Image::ConstPtr& tof_info_depth){
ROS_INFO("深度图的长度为%d, 宽度为%d \n", tof_info_depth->height, tof_info_depth->width );
static ros::NodeHandle n;
static ros::Publisher publisher = n.advertise("depth_image", 100);
static sensor_msgs::Image image;
cv_bridge::CvImagePtr depth_pty;
depth_pty = cv_bridge::toCvCopy(tof_info_depth, sensor_msgs::image_encodings::TYPE_16UC1);
cv::Mat depth_img = depth_pty->image;
printf("img.row:%d, img.col:%d", depth_img.rows, depth_img.cols);
flip(depth_img, depth_img, 1);//沿着y轴对称
sensor_msgs::ImagePtr msg = cv_bridge::CvImage(tof_info_depth->header, "mono16", depth_img).toImageMsg();
publisher.publish(msg);
}
void operInfo_pcd(const sensor_msgs::PointCloud2::ConstPtr& tof_info_pcd)
{
static ros::NodeHandle n;
static ros::Publisher publisher = n.advertise("pcd_image", 100);
pcl::PointCloud::Ptr cloud(new pcl::PointCloud);
pcl::PointCloud::Ptr transformed_cloud (new pcl::PointCloud );
sensor_msgs::PointCloud2 pointCloud;
pcl::fromROSMsg(*tof_info_pcd, *cloud);
float A = 0, B = 1, C = 1, D = 0;
float e = sqrt(A * A + B * B + C * C);//为了后续将平面法向量转化为单位向量
float a = A / e, b = B / e, c = C / e;
float r = D / e;
Eigen::Matrix4f mirMatrix;
mirMatrix << 1 - 2 * a*a, -2 * a*b, -2 * a*c, -2 * a*r,
-2 * a*b, 1 - 2 * b*b, -2 * b*c, -2 * b*r,
-2 * a*c, -2 * b*c, 1 - 2 * c*c, -2 * c*r,
0, 0, 0, 1;
// float theta = M_PI;
// Eigen::Affine3f transform = Eigen::Affine3f::Identity();
// transform.rotate (Eigen::AngleAxisf (theta, Eigen::Vector3f::UnitY()));
pcl::transformPointCloud(*cloud, *transformed_cloud, mirMatrix);
pcl::toROSMsg(*transformed_cloud, pointCloud);
// static pcl::visualization::CloudViewer viewer("123");//直接创造一个显示窗口
// viewer.showCloud(transformed_cloud);//窗口显示点云
publisher.publish(pointCloud);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL, "");
ros::init(argc, argv, "ros2OpneCV");
ros::NodeHandle nh;
ros::Subscriber sub_gray = nh.subscribe("tof_info_gray", 10, operInfo_gray);
ros::Subscriber sub_depth = nh.subscribe("tof_info_depth", 10, operInfo_depth);
ros::Subscriber sub_pcd = nh.subscribe("tof_info_pcd", 10, operInfo_pcd);
ros::spin();
return 0;
}
其中回调函数operInfo_depth与operInfo_gray是分别将深度图与灰度图镜像的函数。思路是首先将sensor_msgs::Image的话题信息转换成cv类型的,通过矩阵Mat接收图片,然后再进行flip镜像操作,操作完成后再将cv类型的图片转换为sensor_msgs::Image类型的消息发布即可。
2.2.4镜像效果
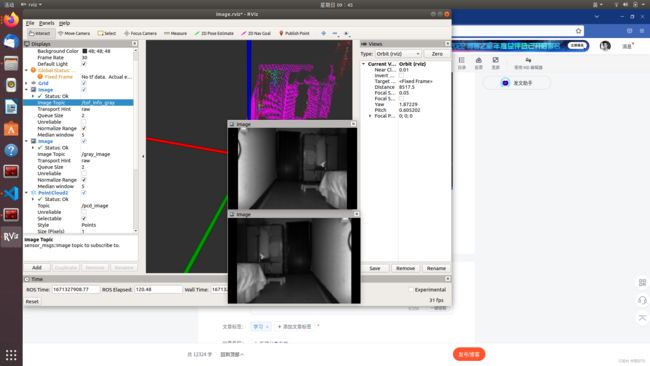
由效果图可以看出,镜像效果还是很不错的。
三、点云的获取与镜像
3.1点云数据的获取
点云话题发布数据如下,经过计算点云数据中的每个点的数据信息有16个字节,参考下面的博客
解析sensor_msgs::PointCloud2 ROS点云数据_KennethYangle的博客-CSDN博客_sensor_msgs/pointcloud2
推测出16个字节中有xyz各占四个字节,还有四个字节是intensity,然后再参考相关资料,完善配了点云信息的发布。
}else if(i == MEM_AGENT_SINK_POINT_CLOUD){
//发布点云信息
tof_info_pcd.header.seq = 1;
tof_info_pcd.header.stamp = ros::Time::now();
tof_info_pcd.header.frame_id = "tof_info_pcd";
tof_info_pcd.height = 1;
tof_info_pcd.width = 320 * 240;
tof_info_pcd.fields.resize(4);
tof_info_pcd.fields[0].name = "x";
tof_info_pcd.fields[0].offset = 0;
tof_info_pcd.fields[0].datatype = 7;
tof_info_pcd.fields[0].count = 1;
tof_info_pcd.fields[1].name = "y";
tof_info_pcd.fields[1].offset = 4;
tof_info_pcd.fields[1].datatype = 7;
tof_info_pcd.fields[1].count = 1;
tof_info_pcd.fields[2].name = "z";
tof_info_pcd.fields[2].offset = 8;
tof_info_pcd.fields[2].datatype = 7;
tof_info_pcd.fields[2].count = 1;
tof_info_pcd.fields[3].name = "intensity";
tof_info_pcd.fields[3].offset = 12;
tof_info_pcd.fields[3].datatype = 7;
tof_info_pcd.fields[3].count = 1;
tof_info_pcd.is_bigendian = 0;
tof_info_pcd.point_step = 16;
tof_info_pcd.row_step = tof_info_pcd.point_step * tof_info_pcd.width;
uint8_t *pcd = (uint8_t *)data[i].addr;
for(int q = 0; q < data[i].size; q++)
{
tof_info_pcd.data.push_back(pcd[q]);
}
tof_info_pcd.is_dense = 1;
pub_pointCloud.publish(tof_info_pcd);
tof_info_pcd.data.clear();
// SaveImageData_pointcloud(data[i].addr, data[i].size);
//SavePointCloud_ply(memData[i].addr, memData[i].size);
// printf("get point cloud size [%d]\n", data[i].size);
}else if(i == MEM_AGENT_SINK_GRAY){3.2点云的镜像
由于获取的点云信息和上面的深度图与灰度图一样,需要进行镜像,才可以正常显示,通过查阅资料,决定将点云信息sensor_msgs::PointCloud2转换成pcl::PointCloud信息后进行镜像操作,然后再转换成sensor_msgs::PointCloud2信息发布,在rviz中显示。
参考以下博客写出了点云的镜像程序
PCL实现点云关于空间中任意平面对称_mengzhilv11的博客-CSDN博客_pcl::transformpointcloud
void operInfo_pcd(const sensor_msgs::PointCloud2::ConstPtr& tof_info_pcd)
{
static ros::NodeHandle n;
static ros::Publisher publisher = n.advertise("pcd_image", 100);
pcl::PointCloud::Ptr cloud(new pcl::PointCloud);
pcl::PointCloud::Ptr transformed_cloud (new pcl::PointCloud );
sensor_msgs::PointCloud2 pointCloud;
pcl::fromROSMsg(*tof_info_pcd, *cloud);
float A = 0, B = 1, C = 1, D = 0;
float e = sqrt(A * A + B * B + C * C);//为了后续将平面法向量转化为单位向量
float a = A / e, b = B / e, c = C / e;
float r = D / e;
Eigen::Matrix4f mirMatrix;
mirMatrix << 1 - 2 * a*a, -2 * a*b, -2 * a*c, -2 * a*r,
-2 * a*b, 1 - 2 * b*b, -2 * b*c, -2 * b*r,
-2 * a*c, -2 * b*c, 1 - 2 * c*c, -2 * c*r,
0, 0, 0, 1;
// float theta = M_PI;
// Eigen::Affine3f transform = Eigen::Affine3f::Identity();
// transform.rotate (Eigen::AngleAxisf (theta, Eigen::Vector3f::UnitY()));
pcl::transformPointCloud(*cloud, *transformed_cloud, mirMatrix);
pcl::toROSMsg(*transformed_cloud, pointCloud);
// static pcl::visualization::CloudViewer viewer("123");//直接创造一个显示窗口
// viewer.showCloud(transformed_cloud);//窗口显示点云
publisher.publish(pointCloud);
} 通过更改ABCD的值来指定平面。
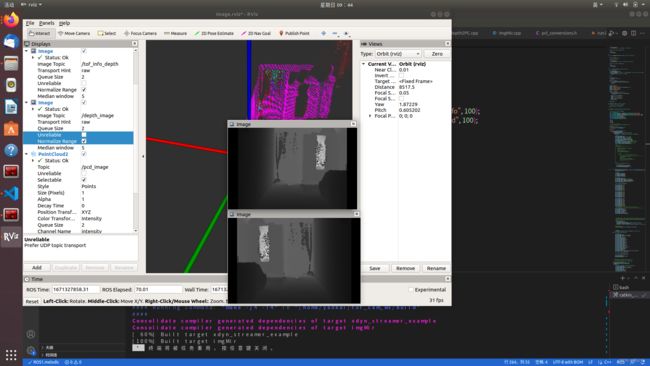
3.3镜像效果
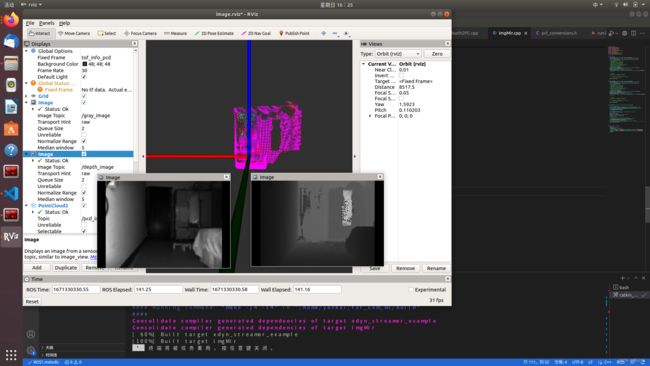
三个图均为镜像后的点云图、深度图以灰度图,效果还不错。
四、点云地图的构建
4.1 寻找思路
通过查阅一些资料,以及目前可以获取的数据:深度图,灰度图以及点云图。决定采用orb-slam2来进行点云地图的构建。
前两次构建
参考的该博主的博客,代码是在高博的基础上更改的,不仅仅是为了构建点云地图,还有八叉树地图的构建,第一版代码运行起来后,一旦运行的数据变多,就会崩调,第二版代码运行起来后,构建的点云有错位的情况,考虑到都是在高博代码的基础上修改的,因此决定直接跑高博的代码。
ORB-SLAM2 在线构建稠密点云(一)_熊猫飞天的博客-CSDN博客_稠密点云
4.2 运行高博的代码
4.2.1 配置环境
ubantu18.04 + ROS Melodic
安装Eigen库
安装pangolin0.5库
安装sophus库
opencv库(无需安装,ros自带3.2.0版本)
pcl库(无需安装,ros自带1.7版本)
参考博客
Ubuntu18.04安装和配置ORB_SLAM2(非ROS、ROS环境)_混沌浮世的博客-CSDN博客
4.2.2 代码运行
参考下面的一篇博客,我遇到的问题基本一样
高翔ORB-SLAM2稠密建图编译(添加实时彩色点云地图+保存点云地图)_m0_60355964的博客-CSDN博客_稠密点云彩色
4.2.3 相机标定
代码运行后,没有了前两次的bug,可以平稳运行,但是在绕房间转了一圈后,发现墙面是圆的,推测是没有考虑相机畸变参数的原因。
修改前k1、k2均为0,下面是修改后的,无切向畸变,有径向畸变。

标定方法参考下面这篇博客,使用matlab工具箱进行标定。
相机标定之使用Matlab工具箱_Robots.的博客-CSDN博客_matlab相机标定
更新参数后,点云地图恢复正常。
如何卸载安装完成的库?
Linux下PCL的安装与卸载_zzr1024的博客-CSDN博客_卸载pcl
找到安装路径(通过再次安装可以找到),再移除文件即可。
OpenCV库共存问题
Ubuntu下多版本OpenCV共存和切换_W_Tortoise的博客-CSDN博客_ubuntu opencv多版本
Gtk-ERROR **: GTK+ 2.x symbols detected. Using GTK+ 2.x and GTK+ 3 in the same process is not supported
Gtk-ERROR **: GTK+ 2.x symbols detected. Using GTK+ 2.x and【qt吧】_百度贴吧
论ORBSLAM_with_pointcloud_map段错误(核心已转储)的另一种解决方法
论ORBSLAM_with_pointcloud_map段错误(核心已转储)的另一种解决方法 - 代码先锋网
ORB-SLAM2启动
https://blog.csdn.net/xyt723916/article/details/89374201
orbslam2_pointcloud: /usr/include/pcl-1.8/pcl/conversions.h:252:void pcl::toPCLPointCloud2(const pcl::PointCloud
已放弃 (核心已转储)