无人驾驶虚拟仿真(十二)--图像处理之红绿灯识别
简介:在交通地图中有红绿灯组件,一般放置在T形或者十字路口处,车辆行驶过程中,需要检测红绿灯信号来控制车辆启停,以符合基本的交通规则。红绿灯识别基本分为图像截取、斑点检测、颜色识别三步来实现。
1、新建地图
为了完成红绿灯检测,我们需要创建一个有红绿灯的仿真环境,地图文件如下:
注:地图文件保存路径请参考第一章说明,同时修改duckiebot_node配置文件内的map-name配置
tiles:
- [floor , floor , floor , floor , floor , floor , floor , floor ]
- [floor , curve_left/W, straight/W, 3way_left/W, straight/W , straight/W , curve_left/N , floor ]
- [floor , straight/S , floor , straight/N , floor , floor , straight/N , floor ]
- [floor , 3way_left/S , straight/W, 4way , straight/E , straight/E , 3way_left/N , floor ]
- [floor , straight/S , floor , straight/S , floor , floor , straight/N , floor ]
- [floor , straight/S , floor , straight/S , floor , curve_right/N , curve_left/E , floor ]
- [floor , curve_left/S, straight/E, 3way_left/E, straight/E , curve_left/E , floor , floor ]
- [floor , floor , floor , floor , floor , floor , floor , floor ]
objects:
trafficlight1:
kind: trafficlight
place:
tile: [3,4]
relative:
~SE2Transform:
p: [-0.18,-0.18]
theta_deg: 135
height: 0.3
optional: true
trafficlight2:
kind: trafficlight
place:
tile: [6,4]
relative:
~SE2Transform:
p: [-0.18,-0.18]
theta_deg: 135
height: 0.3
optional: true
trafficlight3:
kind: trafficlight
place:
tile: [1,4]
relative:
~SE2Transform:
p: [-0.18,-0.18]
theta_deg: 135
height: 0.3
optional: true
trafficlight4:
kind: trafficlight
place:
tile: [3,6]
relative:
~SE2Transform:
p: [-0.18,-0.18]
theta_deg: 135
height: 0.3
optional: true
trafficlight5:
kind: trafficlight
place:
tile: [3,1]
relative:
~SE2Transform:
p: [-0.18,-0.18]
theta_deg: 135
height: 0.3
optional: true
tile_size: 0.585地图是一个8*8的地图,周围一圈空地,实际面积是6*6的,有4个丁字路口,一个十字路口,每个路口预设一个红绿灯,并有一个连续弯道:
参考前面章节,截两张红绿灯的图片:


2、图片截取
当车辆运行到红绿灯附近时,红绿灯在车辆视野中的位置基本都是偏上偏左,所以截取左上区域的图片进行处理,以减少计算量:
h, w, n = image.shape #获取原始图片尺寸
crop_norm = [[0.0, 0.2], [0.0, 0.6]] #设定截取比例,上下:0~20%,左右0~60%
h_start = int(np.floor(h * crop_norm[0][0]))
h_end = int(np.ceil(h * crop_norm[0][1]))
w_start = int(np.floor(w * crop_norm[1][0]))
w_end = int(np.ceil(w * crop_norm[1][1]))
img_tl = image[h_start:h_end, w_start:w_end, :] #获得交通灯所在区域图像3、斑点检测
斑点检测采用霍夫圆检测的方法
HoughCircles(gray,cv2.HOUGH_GRADIENT,5,15,param1,param2,minRadius,maxRadius)
gray:对一幅彩色图片进行处理之后的单通道灰度图片
HOUGH_GRADIENT:是使用霍夫梯度法检测圆
5:这个参数是double类型的dp,用来检测圆心的累加器图像的分辨率于输入图像之比的倒数,且此参数允许创建一个比输入图像分辨率低的累加器。上述文字不好理解的话,来看例子吧。例如,如果dp= 1时,累加器和输入图像具有相同的分辨率。如果dp=2,累加器便有输入图像一半那么大的宽度和高度
15:被检测到的圆心的最小距离. 如果该参数很小, 除了一个正确的圆之外, 该圆的邻居也可能被错误地检测出来. 如果该参数很大,一些圆将可能被错过
param1:此参数是对应Canny边缘检测的最大阈值,最小阈值是此参数的一半 也就是说像素的值大于param1是会检测为边缘
param2:它表示在检测阶段圆心的累加器阈值。它越小的话,就可以检测到更多根本不存在的圆,而它越大的话,能通过检测的圆就更加接近完美的圆形了
minRadius:表示能够检测的最小圆的半径
maxRadius:表示能够检测的最大圆的半径
#霍夫圆检测需要用灰度图
gray = cv2.cvtColor(img_tl, cv2.COLOR_BGR2GRAY)
#霍夫圆检测:
circles = cv2.HoughCircles(gray,cv2.HOUGH_GRADIENT,5,15,param1=120,param2=40,minRadius=3,maxRadius=15) 3、感兴趣区域截取:根据检测到的圆的圆心坐标和半径,截取红绿灯图片
if circles1 is not None:
circles1 = np.uint16(np.around(circles1)) #数据转化为整数
for circle in circles1[0,:]: #圆心靠近边界防止坐标成为负数,适当扩大范围
if circle[0] < circle[2]:
circle[0] = circle[2]
if circle[1] < circle[2]:
circle[1] = circle[2]
#截取红绿灯图片
roi = image1[(circle[1]-circle[2]):(circle[1]+circle[2]),(circle[0]-circle[2]):(circle[0]+circle[2])]
#检测颜色
r = detectColor(roi)4、检测颜色
在截取到的红绿灯图片中通过处理计算红色点与绿色点的数量,数量大的颜色且数量超过60,认定为该颜色。
def detectColor(image):
#转化为HSV颜色格式
hsv_img = cv2.cvtColor(image,cv2.COLOR_BGR2HSV)
#设定颜色检测范围
red_min = np.array([0,43,46])
red_max = np.array([10,255,255])
red_min2 = np.array([156,43,46])
red_max2 = np.array([180,255,255])
green_min = np.array([35,43,46])
green_max = np.array([77,255,255])
#利用cv2.inRange函数设阈值,去除背景部分
red_thresh = cv2.inRange(hsv_img,red_min,red_max)+cv2.inRange(hsv_img,red_min2,red_max2)
green_thresh = cv2.inRange(hsv_img,green_min,green_max)
# 进行中值滤波
red_blur = cv2.medianBlur(red_thresh,5)
green_blur = cv2.medianBlur(green_thresh,5)
#计算红色和绿色的点的数量
red = cv2.countNonZero(red_blur)
green = cv2.countNonZero(green_blur)
#取较大值
lightColor = max(red,green)
if lightColor > 60: #有效点数量大于60认为检测到红绿灯
if lightColor == red: #红色返回1
return 1
elif lightColor == green: #绿色返回-1
return -1
else: #否则认定为误检测,返回0
return 05、统计结果
同一张图片中可能存在误检测出来的圆,统计所有圆颜色检测结果,结果求和,和大于0认定检测到红灯,小于0检测到绿灯:
image1 = cv2.imread("images/red.png")
image2 = cv2.imread("images/green.png")
circles1 = detectState(image1)
circles2 = detectState(image2)
result1 = 0
result2 = 0
if circles1 is not None:
circles1 = np.uint16(np.around(circles1))
for circle in circles1[0,:]:
if circle[0] < circle[2]:
circle[0] = circle[2]
if circle[1] < circle[2]:
circle[1] = circle[2]
roi = image1[(circle[1]-circle[2]):(circle[1]+circle[2]),(circle[0]-circle[2]):(circle[0]+circle[2])]
r = detectColor(roi)
result1 += r
if result1>0:
cv2.imshow("image1--red", image1)
elif result1<0:
cv2.imshow("image1--green", image1)
if circles2 is not None:
circles2 = np.uint16(np.around(circles2))
for circle in circles2[0,:]:
if circle[0] < circle[2]:
circle[0] = circle[2]
if circle[1] < circle[2]:
circle[1] = circle[2]
roi = image2[(circle[1]-circle[2]):(circle[1]+circle[2]),(circle[0]-circle[2]):(circle[0]+circle[2])]
r = detectColor(roi)
result2 += r
if result2>0:
cv2.imshow("image2--red", image2)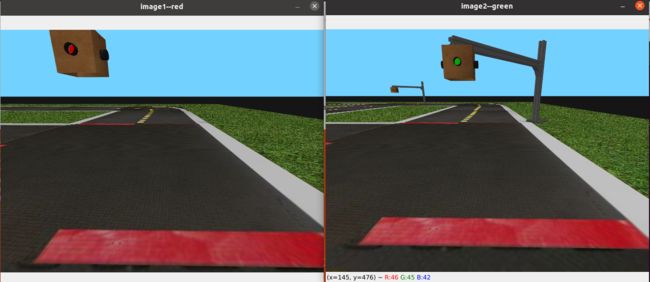
6、功能移植到ROS平台
进入工作空间目录:
$ cd ~/myros/catkin_ws/src
创建新功能包:
$ catkin_create_pkg traffic_light rospy duckietown_msgs std_msgs
创建配置文件:
$ mkdir -p traffic_light/config/traffic_light_node
$ touch traffic_light/config/traffic_light_node/default.yaml
新建启动脚本:
$ mkdir -p traffic_light/launch
$ touch traffic_light/launch/start.launch
新建源码文件
$ touch traffic_light/src/traffic_light_node.py
修改编译配置文件
$ gedit traffic_light/CMakeLists.txt

修改为:

编辑配置文件:
$ gedit traffic_light/config/traffic_light_node/default.yaml
min_point_count: 60
crop_norm: [[0.0, 0.2], [0.0, 0.6]]
dp: 5
minDist: 15
param1: 120
param2: 40
minRadius: 3
maxRadius: 15编辑源码文件:
$ gedit traffic_light/src/traffic_light_node.py
#!/usr/lib/env python3
import rospy
import cv2
import numpy as np
import math
from cv_bridge import CvBridge
from std_msgs.msg import Bool
from sensor_msgs.msg import Image,CompressedImage
class TrafficLightNode():
def __init__(self):
rospy.init_node("traffic_light_node", anonymous=False)
self.bridge = CvBridge()
#红线检测标志
self.stop_line_flag = False
#有效点数量
self.min_point_count = rospy.get_param('~min_point_count', default=60)
#红绿灯截取参数
self.crop_norm = rospy.get_param('~crop_norm', default=[[0.0, 0.2], [0.0, 0.6]])
#霍夫圆检测参数设置
self.dp = rospy.get_param('~dp', default=5)
self.minDist = rospy.get_param('~minDist', default=15)
self.param1 = rospy.get_param('~param1', default=120)
self.param2 = rospy.get_param('~param2', default=40)
self.minRadius = rospy.get_param('~minRadius', default=3)
self.maxRadius = rospy.get_param('~maxRadius', default=15)
#订阅图像话题
rospy.Subscriber("~image/compressed", CompressedImage, self.cb_image)
#订阅红线检测话题,检测到红线时才进行红绿灯识别,减少计算量
rospy.Subscriber("~detected", Bool, self.cb_stop_line)
self.pub_tl_info = rospy.Publisher("~tlState", Bool, queue_size=10)
def cb_image(self, msg):
if self.stop_line_flag: #红线检测结果
image = self.bridge.compressed_imgmsg_to_cv2(msg)
result = self.detect(image)
if result>0:
self.pub_tl_info.publish(Bool(data=True))
elif result<0:
self.pub_tl_info.publish(Bool(data=False))
def cb_stop_line(self, msg):
self.stop_line_flag = msg.data
def detect(self, image):
h, w, n = image.shape
h_start = int(np.floor(h * self.crop_norm[0][0]))
h_end = int(np.ceil(h * self.crop_norm[0][1]))
w_start = int(np.floor(w * self.crop_norm[1][0]))
w_end = int(np.ceil(w * self.crop_norm[1][1]))
img_tl = image[h_start:h_end, w_start:w_end, :]
gray = cv2.cvtColor(img_tl, cv2.COLOR_BGR2GRAY)
circles = cv2.HoughCircles(gray,cv2.HOUGH_GRADIENT,self.dp,self.minDist,param1=self.param1,param2=self.param2,minRadius=self.minRadius,maxRadius=self.maxRadius)
result = []
if circles is not None:
circles = np.uint16(np.around(circles))
for circle in circles[0,:]:
if circle[0] < circle[2]:
circle[0] = circle[2]
if circle[1] < circle[2]:
circle[1] = circle[2]
roi = image[(circle[1]-circle[2]):(circle[1]+circle[2]),(circle[0]-circle[2]):(circle[0]+circle[2])]
color = self.detectColor(roi)
result.append(color)
return np.sum(result)
else:
return 0
def detectColor(self, image):
hsv_img = cv2.cvtColor(image,cv2.COLOR_BGR2HSV)
red_min = np.array([0,43,46])
red_max = np.array([10,255,255])
red_min2 = np.array([156,43,46])
red_max2 = np.array([180,255,255])
green_min = np.array([35,43,46])
green_max = np.array([77,255,255])
red_thresh = cv2.inRange(hsv_img,red_min,red_max)+cv2.inRange(hsv_img,red_min2,red_max2)
green_thresh = cv2.inRange(hsv_img,green_min,green_max)
# 进行中值滤波
red_blur = cv2.medianBlur(red_thresh,5)
green_blur = cv2.medianBlur(green_thresh,5)
red = cv2.countNonZero(red_blur)
green = cv2.countNonZero(green_blur)
lightColor = max(red,green)
if lightColor > self.min_point_count:
if lightColor == red:
return 1
elif lightColor == green:
return -1
else:
return 0
if __name__=='__main__':
node = TrafficLightNode()
rospy.spin()编辑启动脚本:
$ gedit traffic_light/launch/start.launch
编译:
$ cd ~/myros/catkin_ws
$ catkin_make
编辑多节点启动文件
$ gedit start.launch
启动程序:
$ source devel/setup.bash
$ roslaunch start.launch
启动程序,经过测试,发现红线检测范围过小,会因为延迟导致不停车,修改红线检测配置文件,
alarm_dist: 0.12修改后重新运行,可正常停车。