YB菜菜的机器学习自学之路(一)——基础的罗森布拉特(Rosenblatt)感知器
@TOC
前提说明
想着以后雷达应用可能需要和深度学习什么的结果,在B站购买了《小白也能听懂的人工智能原理》想着听听学习学习,在这个假期,入个小小的门。 整点笔记方便自己以后回顾。
1.创建新工程
勉勉强强装了PyCharm和Anaconda,并尝试创建第一个新工程。
利用Anaconda Prompt创建一个虚拟环境, 大致步骤如下:
Step1:打开Anaconda Prompt,输入命令:
conda create -n test python=3.7
创建了一个叫test的虚拟环境,python版本为3.7.
Step2: 接着输入命令:
activate test
进入自己的虚拟环境中。
step3:通过命令安装一些自己需要的库:
pip install matplotlib -i https://pypi.tuna.tsinghua.edu.cn/simple
实现 比如matplotlib库的安装,其中后面的这个网址是清华源,为了稳定,更快的下载库用的。
Step4:这些弄好以后差不多就有了一个虚拟环境。可以通过命令查看conda环境里面是否有这个环境:
conda env list
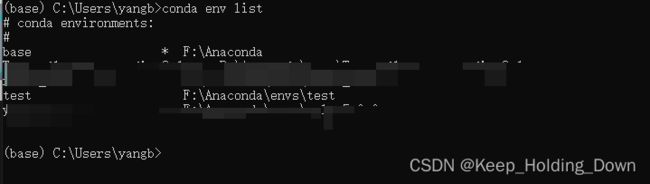
图1
如图1 ,可以看到 除了基础的conda自带的base环境,还有自己创造的test环境。
Step5:在PyCharm中建立一个新工程,并选择这个环境
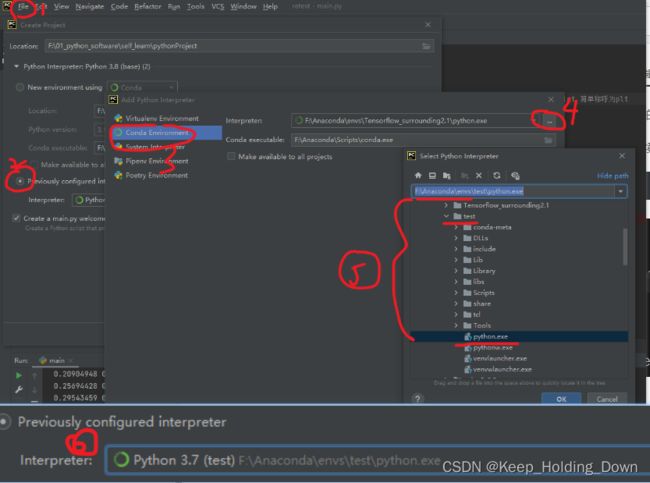 图2
图2
如图2,打开PyCharm,选择file–Newproject—previously configured interpreter—conda environment
打开目录,找到conda所在地方,找到conda-env–test里面的python.exe。
点确定就能看到图1(6)所示,再点确定,就能创建一个非常基础的工程。如图3所示。

图3
Step6:运行程序
我们可以在pycharm里面右键选择run “main”来运行主函数。
也可通过cmd运行。
命令如下:

图4
如图4所示,我的工程在F盘,所以首先打开CMD 然后激活环境,复制文件所在的目录。运行结束后要再输入对应的“盘:”,比如我是f盘,就需要输入“f:”。即,当前缀变成路径,而不再是系统C的时候,表示成功。
最后,输入py mian.py 再回车,就成功运行了函数。
2.罗森布拉特(Rosenblatt)感知器

图5 Rosenblatt感知模型和一元一次感知案例
图5展示了基础的Rosenblatt感知模型(图5蓝色部分)以及一个一元一次感知的实例(图五黑色部分)。
假设有一组观察值x,和y,要感知x和y之间的关系。
假设通过长期观察,我们估计他是一个线性关系,即y=wx,其中w为权重值。
为了获得w值,我们可以通过构建Rosenblatt感知模型让机器通过这组数据帮我们找到真实的w值。
step1:输入参数
首先我们将这些观察值的第一组数据( x 1 x_{1} x1, y 1 y_{1} y1)和权重值的初始值 w w w输入进模型(这里w可以是任意大小的。
step2:构建期望函数得到预测值
因为通过观察,我们认为数据关系是一元一次函数,即 y = w x y=wx y=wx.
因此我们将观察数据带入到期望函数中,得到一个预测值:
Y 1 = w ∗ x 1 ( 1 ) Y_{1}=w*x_{1} (1) Y1=w∗x1(1)
step3: 通过与当前实际的观测值进行比较,获得误差:
e = y 1 − Y 1 ( 2 ) e=y_{1}-Y_{1} (2) e=y1−Y1(2)
step4: 获得新的权重值
在Rosenblatt中,新的权重值W的获得方式为:
W = w + e ∗ x ∗ α ( 3 ) W=w+e*x*\alpha (3) W=w+e∗x∗α(3)
其中,e表示由step3获得的当前预测值与实际值之间的误差, α \alpha α为学习率,它反映了w调整的快慢,如果 α \alpha α太大,则可出现震荡,那么永远得不到真实的权重 w w w。如果 α \alpha α太小,则调整的太慢,效率太低,也有可能陷入局部解。
理论上 W = w + e ∗ α W=w+e*\alpha W=w+e∗α就能满足条件,但是这种情况下,存在一个问题,如图6所示。
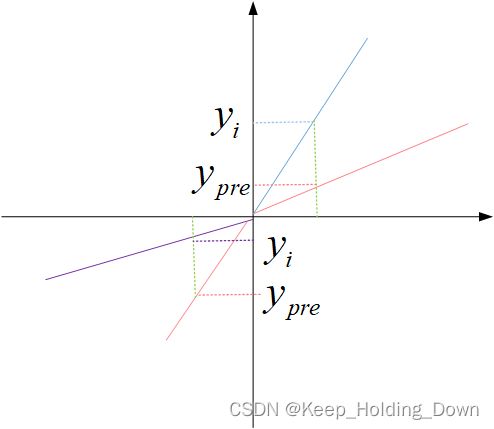
图6
假设权重值w的估计方式为 W = w + e ∗ α W=w+e*\alpha W=w+e∗α。
在图6中,蓝色表示真正的斜率线,红色表示当前的斜率线。
假设输入的数据都是正值( x i > 0 , y i > 0 x_{i}>0,y_{i}>0 xi>0,yi>0), 此时预测值为 y p r e y_{pre} ypre。
那么误差 e = y i − y p r e > 0 e=y_{i}-y_{pre}>0 e=yi−ypre>0.
按照客观情况,我们知道此时的w偏校,应增大w值:
按照公式 W = w + e ∗ α W=w+e*\alpha W=w+e∗α可以得到 W>w,新的权重值W增大,符合规律。
但是如果数值是负的( x i < 0 , y i < 0 x_{i}<0,y_{i}<0 xi<0,yi<0),如图6中的第三象限:
其中紫色为真正的斜率,而红色表示当前的预测斜率。
理论上我们应该减少斜率,但是此时
误差 e = y i − y p r e > 0 e=y_{i}-y_{pre}>0 e=yi−ypre>0.
按照公式 W = w + e ∗ α W=w+e*\alpha W=w+e∗α,可以得到W>w,此时,调整出错。
为了解决这个方法,我们选择公式(3),即在误差项处再乘上输入参数x,由于x存在符号,就完美的解决了这个问题。 step5: 更新权重值w step6:进行下一次迭代 step7 ,当迭代满足条件或者此时,输出最终的权重w 最后,我们得到x与y的关系 结果展示
对于第三象限的情况,
按照公式 W = w + e ∗ α ∗ x i W=w+e*\alpha*x_{i} W=w+e∗α∗xi,可以得到W
即 w = W w=W w=W
在下一次迭代中, ( x 2 , y 2 , 新的 w ) (x_{2}, y_{2},新的w) (x2,y2,新的w)将作为输入参数进行新的一伦的迭代。
y = w l a s t ∗ x y=w_{last}*x y=wlast∗x
即,机器通过感知模型实现了自主学习搜索。
图7 1次迭代

图8 100次迭代

图9 一万次迭代