学习笔记|Pytorch使用教程27(模型保存与加载)
学习笔记|Pytorch使用教程27
本学习笔记主要摘自“深度之眼”,做一个总结,方便查阅。
使用Pytorch版本为1.2
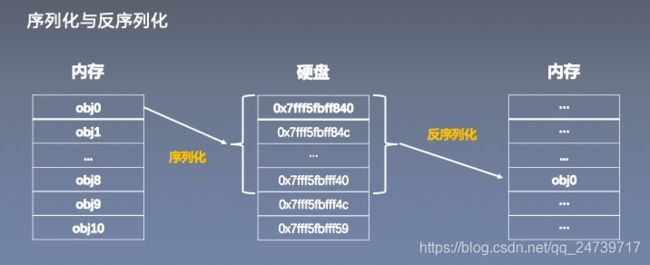
- 序列化与反序列化
- 模型保存与加载的两种方式
- 模型断点续训练
一.序列化与反序列化
是为了将数据可以长久的保存。
1.torch. save
主要参数:
- obj:对象
- f:输出路径
2.torch.load
主要参数:
- f:文件路径
- map_location: 指定存放位置,cpu or gpu
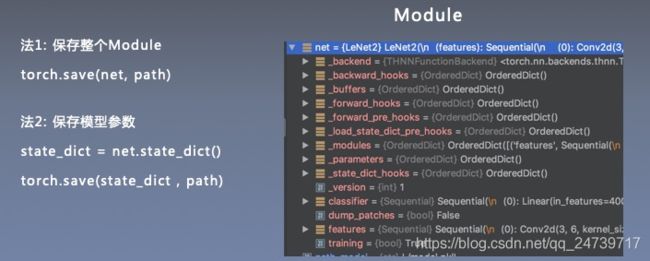
二.模型保存与加载的两种方式
测试代码:
- 保存模型
import torch
import numpy as np
import torch.nn as nn
from tools.common_tools import set_seed
class LeNet2(nn.Module):
def __init__(self, classes):
super(LeNet2, self).__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 6, 5),
nn.ReLU(),
nn.MaxPool2d(2, 2),
nn.Conv2d(6, 16, 5),
nn.ReLU(),
nn.MaxPool2d(2, 2)
)
self.classifier = nn.Sequential(
nn.Linear(16*5*5, 120),
nn.ReLU(),
nn.Linear(120, 84),
nn.ReLU(),
nn.Linear(84, classes)
)
def forward(self, x):
x = self.features(x)
x = x.view(x.size()[0], -1)
x = self.classifier(x)
return x
def initialize(self):
for p in self.parameters():
p.data.fill_(20191104)
net = LeNet2(classes=2019)
# "训练"
print("训练前: ", net.features[0].weight[0, ...])
net.initialize()
print("训练后: ", net.features[0].weight[0, ...])
path_model = "./model.pkl"
path_state_dict = "./model_state_dict.pkl"
# 保存整个模型
torch.save(net, path_model)
# 保存模型参数
net_state_dict = net.state_dict()
torch.save(net_state_dict, path_state_dict)
输出:
训练前: tensor([[[-0.0688, 0.0352, -0.0851, 0.0967, 0.0009],
[ 0.0147, -0.1099, -0.0771, -0.0724, -0.0115],
[ 0.0284, -0.0681, 0.0173, 0.0605, -0.0532],
[ 0.0633, 0.0034, -0.0758, -0.0935, -0.0514],
[ 0.0535, 0.0779, 0.0763, -0.0133, 0.0908]],
[[-0.0762, -0.0750, 0.0036, 0.0081, -0.0599],
[ 0.0548, -0.0073, 0.0883, -0.1042, -0.0900],
[-0.0010, 0.0885, -0.0534, 0.0154, -0.1147],
[ 0.0680, -0.0678, 0.0944, 0.0110, 0.0928],
[-0.0784, 0.0951, 0.0315, 0.0429, 0.0558]],
[[-0.0358, -0.0080, -0.0291, -0.0984, -0.1106],
[-0.0667, -0.0410, 0.0611, 0.1053, -0.0444],
[-0.1016, -0.0010, -0.0353, 0.0638, 0.0796],
[-0.0542, -0.1152, -0.0167, 0.0984, -0.0854],
[-0.0337, -0.0077, -0.0425, 0.0431, -0.0985]]],
grad_fn=<SelectBackward>)
训练后: tensor([[[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.]],
[[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.]],
[[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.]]],
grad_fn=<SelectBackward>)
- 加载模型
import torch
import numpy as np
import torch.nn as nn
from tools.common_tools import set_seed
class LeNet2(nn.Module):
def __init__(self, classes):
super(LeNet2, self).__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 6, 5),
nn.ReLU(),
nn.MaxPool2d(2, 2),
nn.Conv2d(6, 16, 5),
nn.ReLU(),
nn.MaxPool2d(2, 2)
)
self.classifier = nn.Sequential(
nn.Linear(16*5*5, 120),
nn.ReLU(),
nn.Linear(120, 84),
nn.ReLU(),
nn.Linear(84, classes)
)
def forward(self, x):
x = self.features(x)
x = x.view(x.size()[0], -1)
x = self.classifier(x)
return x
def initialize(self):
for p in self.parameters():
p.data.fill_(20191104)
# ================================== load net ===========================
flag = 1
# flag = 0
if flag:
path_model = "./model.pkl"
net_load = torch.load(path_model)
print(net_load)
输出:
LeNet2(
(features): Sequential(
(0): Conv2d(3, 6, kernel_size=(5, 5), stride=(1, 1))
(1): ReLU()
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(3): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1))
(4): ReLU()
(5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(classifier): Sequential(
(0): Linear(in_features=400, out_features=120, bias=True)
(1): ReLU()
(2): Linear(in_features=120, out_features=84, bias=True)
(3): ReLU()
(4): Linear(in_features=84, out_features=2019, bias=True)
)
)
加载和更新state_dict
# ================================== load state_dict ===========================
flag = 1
# flag = 0
if flag:
path_state_dict = "./model_state_dict.pkl"
state_dict_load = torch.load(path_state_dict)
print(state_dict_load.keys())
# ================================== update state_dict ===========================
flag = 1
# flag = 0
if flag:
net_new = LeNet2(classes=2019)
print("加载前: ", net_new.features[0].weight[0, ...])
net_new.load_state_dict(state_dict_load)
print("加载后: ", net_new.features[0].weight[0, ...])
输出:
odict_keys(['features.0.weight', 'features.0.bias', 'features.3.weight', 'features.3.bias', 'classifier.0.weight', 'classifier.0.bias', 'classifier.2.weight', 'classifier.2.bias', 'classifier.4.weight', 'classifier.4.bias'])
加载前: tensor([[[ 0.0147, 0.0484, 0.0264, 0.0008, -0.0298],
[-0.0247, -0.0993, -0.0027, 0.0430, -0.0955],
[ 0.0153, 0.0394, -0.0076, -0.0450, -0.1092],
[ 0.0114, 0.1027, -0.0189, -0.0330, 0.0977],
[ 0.0666, -0.0971, -0.0930, 0.0110, 0.0638]],
[[ 0.0006, -0.0326, 0.0263, 0.0948, -0.0631],
[-0.1066, -0.0316, 0.0757, -0.0114, 0.1028],
[ 0.0704, 0.0368, 0.1142, -0.0035, -0.1099],
[ 0.0567, -0.0815, -0.0002, -0.1015, 0.0845],
[ 0.0235, 0.0542, 0.0773, 0.0409, 0.0635]],
[[-0.0032, -0.0301, 0.0489, 0.0596, -0.0180],
[ 0.0137, 0.0171, 0.0843, -0.1067, 0.0658],
[-0.0924, -0.0611, 0.0802, -0.0018, 0.0137],
[ 0.0364, -0.1142, -0.0575, 0.0875, -0.0954],
[-0.0945, 0.0257, 0.0327, 0.0037, -0.0766]]],
grad_fn=<SelectBackward>)
加载后: tensor([[[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.]],
[[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.]],
[[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.],
[20191104., 20191104., 20191104., 20191104., 20191104.]]],
grad_fn=<SelectBackward>)
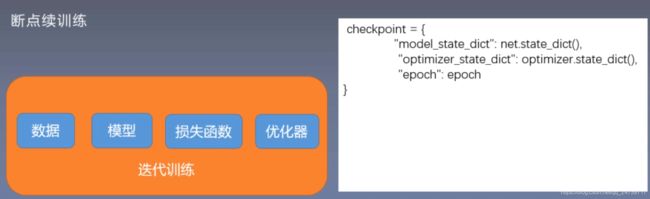
三.模型断点续训练
测试代码:
- 模拟意外中断:
import os
import random
import numpy as np
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
import torchvision.transforms as transforms
import torch.optim as optim
from PIL import Image
from matplotlib import pyplot as plt
from model.lenet import LeNet
from tools.my_dataset import RMBDataset
from tools.common_tools import set_seed
import torchvision
set_seed(1) # 设置随机种子
rmb_label = {"1": 0, "100": 1}
# 参数设置
checkpoint_interval = 5
MAX_EPOCH = 10
BATCH_SIZE = 16
LR = 0.01
log_interval = 10
val_interval = 1
# ============================ step 1/5 数据 ============================
split_dir = os.path.join("..", "..", "data", "rmb_split")
train_dir = os.path.join(split_dir, "train")
valid_dir = os.path.join(split_dir, "valid")
norm_mean = [0.485, 0.456, 0.406]
norm_std = [0.229, 0.224, 0.225]
train_transform = transforms.Compose([
transforms.Resize((32, 32)),
transforms.RandomCrop(32, padding=4),
transforms.RandomGrayscale(p=0.8),
transforms.ToTensor(),
transforms.Normalize(norm_mean, norm_std),
])
valid_transform = transforms.Compose([
transforms.Resize((32, 32)),
transforms.ToTensor(),
transforms.Normalize(norm_mean, norm_std),
])
# 构建MyDataset实例
train_data = RMBDataset(data_dir=train_dir, transform=train_transform)
valid_data = RMBDataset(data_dir=valid_dir, transform=valid_transform)
# 构建DataLoder
train_loader = DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
valid_loader = DataLoader(dataset=valid_data, batch_size=BATCH_SIZE)
# ============================ step 2/5 模型 ============================
net = LeNet(classes=2)
net.initialize_weights()
# ============================ step 3/5 损失函数 ============================
criterion = nn.CrossEntropyLoss() # 选择损失函数
# ============================ step 4/5 优化器 ============================
optimizer = optim.SGD(net.parameters(), lr=LR, momentum=0.9) # 选择优化器
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=6, gamma=0.1) # 设置学习率下降策略
# ============================ step 5/5 训练 ============================
train_curve = list()
valid_curve = list()
start_epoch = -1
for epoch in range(start_epoch+1, MAX_EPOCH):
loss_mean = 0.
correct = 0.
total = 0.
net.train()
for i, data in enumerate(train_loader):
# forward
inputs, labels = data
outputs = net(inputs)
# backward
optimizer.zero_grad()
loss = criterion(outputs, labels)
loss.backward()
# update weights
optimizer.step()
# 统计分类情况
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).squeeze().sum().numpy()
# 打印训练信息
loss_mean += loss.item()
train_curve.append(loss.item())
if (i+1) % log_interval == 0:
loss_mean = loss_mean / log_interval
print("Training:Epoch[{:0>3}/{:0>3}] Iteration[{:0>3}/{:0>3}] Loss: {:.4f} Acc:{:.2%}".format(
epoch, MAX_EPOCH, i+1, len(train_loader), loss_mean, correct / total))
loss_mean = 0.
scheduler.step() # 更新学习率
if (epoch+1) % checkpoint_interval == 0:
checkpoint = {"model_state_dict": net.state_dict(),
"optimizer_state_dict": optimizer.state_dict(),
"epoch": epoch}
path_checkpoint = "./checkpoint_{}_epoch.pkl".format(epoch)
torch.save(checkpoint, path_checkpoint)
if epoch > 5:
print("训练意外中断...")
break
# validate the model
if (epoch+1) % val_interval == 0:
correct_val = 0.
total_val = 0.
loss_val = 0.
net.eval()
with torch.no_grad():
for j, data in enumerate(valid_loader):
inputs, labels = data
outputs = net(inputs)
loss = criterion(outputs, labels)
_, predicted = torch.max(outputs.data, 1)
total_val += labels.size(0)
correct_val += (predicted == labels).squeeze().sum().numpy()
loss_val += loss.item()
valid_curve.append(loss.item())
print("Valid:\t Epoch[{:0>3}/{:0>3}] Iteration[{:0>3}/{:0>3}] Loss: {:.4f} Acc:{:.2%}".format(
epoch, MAX_EPOCH, j+1, len(valid_loader), loss_val/len(valid_loader), correct / total))
train_x = range(len(train_curve))
train_y = train_curve
train_iters = len(train_loader)
valid_x = np.arange(1, len(valid_curve)+1) * train_iters*val_interval # 由于valid中记录的是epochloss,需要对记录点进行转换到iterations
valid_y = valid_curve
plt.plot(train_x, train_y, label='Train')
plt.plot(valid_x, valid_y, label='Valid')
plt.legend(loc='upper right')
plt.ylabel('loss value')
plt.xlabel('Iteration')
plt.show()
输出:
Training:Epoch[000/010] Iteration[010/010] Loss: 0.6846 Acc:53.75%
Valid: Epoch[000/010] Iteration[002/002] Loss: 0.4902 Acc:53.75%
Training:Epoch[001/010] Iteration[010/010] Loss: 0.4099 Acc:85.00%
Valid: Epoch[001/010] Iteration[002/002] Loss: 0.0414 Acc:85.00%
Training:Epoch[002/010] Iteration[010/010] Loss: 0.1470 Acc:94.38%
Valid: Epoch[002/010] Iteration[002/002] Loss: 0.0018 Acc:94.38%
Training:Epoch[003/010] Iteration[010/010] Loss: 0.4276 Acc:88.12%
Valid: Epoch[003/010] Iteration[002/002] Loss: 0.1125 Acc:88.12%
Training:Epoch[004/010] Iteration[010/010] Loss: 0.3169 Acc:87.50%
Valid: Epoch[004/010] Iteration[002/002] Loss: 0.0616 Acc:87.50%
Training:Epoch[005/010] Iteration[010/010] Loss: 0.2026 Acc:91.88%
Valid: Epoch[005/010] Iteration[002/002] Loss: 0.0066 Acc:91.88%
Training:Epoch[006/010] Iteration[010/010] Loss: 0.0866 Acc:98.12%
训练意外中断...
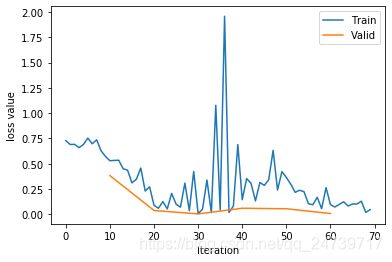
- 接着训练
import os
import random
import numpy as np
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
import torchvision.transforms as transforms
import torch.optim as optim
from PIL import Image
from matplotlib import pyplot as plt
from model.lenet import LeNet
from tools.my_dataset import RMBDataset
from tools.common_tools import set_seed
import torchvision
set_seed(1) # 设置随机种子
rmb_label = {"1": 0, "100": 1}
# 参数设置
checkpoint_interval = 5
MAX_EPOCH = 10
BATCH_SIZE = 16
LR = 0.01
log_interval = 10
val_interval = 1
# ============================ step 1/5 数据 ============================
split_dir = os.path.join("..", "..", "data", "rmb_split")
train_dir = os.path.join(split_dir, "train")
valid_dir = os.path.join(split_dir, "valid")
norm_mean = [0.485, 0.456, 0.406]
norm_std = [0.229, 0.224, 0.225]
train_transform = transforms.Compose([
transforms.Resize((32, 32)),
transforms.RandomCrop(32, padding=4),
transforms.RandomGrayscale(p=0.8),
transforms.ToTensor(),
transforms.Normalize(norm_mean, norm_std),
])
valid_transform = transforms.Compose([
transforms.Resize((32, 32)),
transforms.ToTensor(),
transforms.Normalize(norm_mean, norm_std),
])
# 构建MyDataset实例
train_data = RMBDataset(data_dir=train_dir, transform=train_transform)
valid_data = RMBDataset(data_dir=valid_dir, transform=valid_transform)
# 构建DataLoder
train_loader = DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
valid_loader = DataLoader(dataset=valid_data, batch_size=BATCH_SIZE)
# ============================ step 2/5 模型 ============================
net = LeNet(classes=2)
net.initialize_weights()
# ============================ step 3/5 损失函数 ============================
criterion = nn.CrossEntropyLoss() # 选择损失函数
# ============================ step 4/5 优化器 ============================
optimizer = optim.SGD(net.parameters(), lr=LR, momentum=0.9) # 选择优化器
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=6, gamma=0.1) # 设置学习率下降策略
# ============================ step 5+/5 断点恢复 ============================
path_checkpoint = "./checkpoint_4_epoch.pkl"
checkpoint = torch.load(path_checkpoint)
net.load_state_dict(checkpoint['model_state_dict'])
optimizer.load_state_dict(checkpoint['optimizer_state_dict'])
start_epoch = checkpoint['epoch']
scheduler.last_epoch = start_epoch
# ============================ step 5/5 训练 ============================
train_curve = list()
valid_curve = list()
for epoch in range(start_epoch + 1, MAX_EPOCH):
loss_mean = 0.
correct = 0.
total = 0.
net.train()
for i, data in enumerate(train_loader):
# forward
inputs, labels = data
outputs = net(inputs)
# backward
optimizer.zero_grad()
loss = criterion(outputs, labels)
loss.backward()
# update weights
optimizer.step()
# 统计分类情况
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).squeeze().sum().numpy()
# 打印训练信息
loss_mean += loss.item()
train_curve.append(loss.item())
if (i+1) % log_interval == 0:
loss_mean = loss_mean / log_interval
print("Training:Epoch[{:0>3}/{:0>3}] Iteration[{:0>3}/{:0>3}] Loss: {:.4f} Acc:{:.2%}".format(
epoch, MAX_EPOCH, i+1, len(train_loader), loss_mean, correct / total))
loss_mean = 0.
scheduler.step() # 更新学习率
if (epoch+1) % checkpoint_interval == 0:
checkpoint = {"model_state_dict": net.state_dict(),
"optimizer_state_dic": optimizer.state_dict(),
"loss": loss,
"epoch": epoch}
path_checkpoint = "./checkpint_{}_epoch.pkl".format(epoch)
torch.save(checkpoint, path_checkpoint)
# if epoch > 5:
# print("训练意外中断...")
# break
# validate the model
if (epoch+1) % val_interval == 0:
correct_val = 0.
total_val = 0.
loss_val = 0.
net.eval()
with torch.no_grad():
for j, data in enumerate(valid_loader):
inputs, labels = data
outputs = net(inputs)
loss = criterion(outputs, labels)
_, predicted = torch.max(outputs.data, 1)
total_val += labels.size(0)
correct_val += (predicted == labels).squeeze().sum().numpy()
loss_val += loss.item()
valid_curve.append(loss.item())
print("Valid:\t Epoch[{:0>3}/{:0>3}] Iteration[{:0>3}/{:0>3}] Loss: {:.4f} Acc:{:.2%}".format(
epoch, MAX_EPOCH, j+1, len(valid_loader), loss_val/len(valid_loader), correct / total))
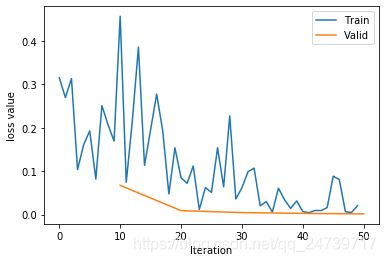
train_x = range(len(train_curve))
train_y = train_curve
train_iters = len(train_loader)
valid_x = np.arange(1, len(valid_curve)+1) * train_iters*val_interval # 由于valid中记录的是epochloss,需要对记录点进行转换到iterations
valid_y = valid_curve
plt.plot(train_x, train_y, label='Train')
plt.plot(valid_x, valid_y, label='Valid')
plt.legend(loc='upper right')
plt.ylabel('loss value')
plt.xlabel('Iteration')
plt.show()
输出:
Training:Epoch[005/010] Iteration[010/010] Loss: 0.2066 Acc:90.62%
Valid: Epoch[005/010] Iteration[002/002] Loss: 0.0410 Acc:90.62%
Training:Epoch[006/010] Iteration[010/010] Loss: 0.2115 Acc:91.25%
Valid: Epoch[006/010] Iteration[002/002] Loss: 0.0111 Acc:91.25%
Training:Epoch[007/010] Iteration[010/010] Loss: 0.0876 Acc:98.12%
Valid: Epoch[007/010] Iteration[002/002] Loss: 0.0173 Acc:98.12%
Training:Epoch[008/010] Iteration[010/010] Loss: 0.0466 Acc:98.75%
Valid: Epoch[008/010] Iteration[002/002] Loss: 0.0045 Acc:98.75%
Training:Epoch[009/010] Iteration[010/010] Loss: 0.0249 Acc:98.75%
Valid: Epoch[009/010] Iteration[002/002] Loss: 0.0016 Acc:98.75%