19.Isaac教程--C语言接口(Isaac C API)
Isaac C API
ISAAC教程合集地址: https://blog.csdn.net/kunhe0512/category_12163211.html
文章目录
- Isaac C API
-
- 程序流程和消息格式
- ROS
- 示例
- 独立示例
- 启动和停止应用程序
- 向 Isaac 应用程序发布消息
- 从 Isaac 应用程序接收消息
- 语言环境设置
- 示例消息
- ImageProto
- RangeScanProto
- StateProto (messages::DifferentialBaseDynamics)
- StateProto (messages::DifferentialBaseControl)
- 缓冲区布局
- 图像缓冲器
- 张量缓冲器
Isaac C API 允许您使用 Isaac SDK 功能,而无需将您的软件堆栈与 ISAAC SDK 完全集成。 通过使用 C API,您不必为代码库使用 Bazel,也不必编写 Isaac codelet。 它还使您能够使用 C++ 以外的编程语言与 Isaac 应用程序进行通信。
-
示例 1:您想将 Isaac 导航堆栈与 Carter 一起使用,但想从您自己的软件堆栈发送目标命令。 您可以通过 C API 向 Carter 应用程序发送 GoTo 命令来实现此目的。 这只需要对现有的 Carter 应用程序进行少量修改。
-
示例 2:您想使用 Isaac 3D 物体姿态估计来检测物体的姿态。 但是,您有自己的代码来获取图像,并且希望在 Isaac 应用程序之外使用估计的姿势。 您可以通过基于 3D 对象姿态估计子图创建一个小型 Isaac 应用程序来实现此目的:您将通过 C API 发送相机图像并通过 C API 接收估计的姿态。
-
示例 3:您想使用自定义模拟环境来评估 Isaac 应用程序。 您可以通过 C API 将传感器信息从模拟器发送到 Isaac 应用程序,并通过 C API 从应用程序接收命令。
程序流程和消息格式
使用 Isaac C API,您可以向 Isaac 应用程序发送消息并从中接收消息。 C API 负责启动和停止 Isaac 应用程序:您不能在没有 Isaac 应用程序的情况下使用 C API。 Isaac 应用程序是从 Isaac 使用的通用应用程序、图形和配置 JSON 文件加载的。 有关示例,请参阅示例部分。
通过 C API 发送的消息使用“JSON & buffers”格式。 在这种格式中,大部分高级消息数据存储在 JSON 对象中,而大数据块(例如图像和张量)存储在字节缓冲区中。 消息的 JSON 格式直接基于 Isaac 使用的相应 Cap’n Proto 消息。 您可以在本文档的消息 API 部分中查看消息列表。 缓冲区布局和示例消息部分提供了有关图像和张量的 JSON 格式和缓冲区布局的更多详细信息。
C API 的每个实例都与单个 Isaac 应用程序接口。 如果您想使用同一个 C 程序访问多个独立的 Isaac 功能,您应该将所有必需的节点添加到单个 Isaac 应用程序中。 这确保您只有一个调度程序在运行。 虽然可以从不同的进程启动多个 Isaac 应用程序,但您最终会得到多个独立的调度程序,这可能不是最佳的或者需要调整调度程序参数。
ROS
如果您想与现有的 ROS 应用程序通信,则不必使用 C API。 Isaac 可以通过 Isaac ROS 网桥直接与 ROS 通信。
示例
Isaac SDK 包含两个示例应用程序,用于说明如何使用 C API:
-
//apps/tutorials/c_api/viewer.c -
//apps/tutorials/c_api/depth.c
使用以下命令运行示例:
bazel run //apps/tutorials/c_api:c_api_viewer
bazel run //apps/tutorials/c_api:c_api_depth
viewer.c 示例使用 C 代码创建图像并将其发送到位于 //apps/tutorials/c_api/viewer.app.json 中的 Isaac 应用程序。 Isaac 应用程序使用带有 ImageViewer codelet 的单个节点来可视化通过 C 发送的图像。
depth.c 示例在 //apps/tutorials/c_api/depth.app.json 中运行 Isaac 应用程序,它有一个节点运行 CameraGenerator codelet,创建一个虚拟深度图像。 C 代码接收这些消息并在控制台上打印中心像素的深度。
为了方便起见,这些示例使用 Bazel 来编译 C 源代码文件。 接下来我们将向您展示一个完全独立的示例,您的自定义代码不需要 Bazel。
独立示例
使用以下命令构建 C API 并将其部署到本地计算机上的文件夹(从 sdk/ 子目录):
./../engine/engine/build/deploy.sh -p //packages/engine_c_api:isaac_engine_c_api-pkg -d x86_64 -h localhost --deploy_path ~
链接代码时,必须为 C API 和“sight”模块提供共享库的路径,它们位于:
-
/engine/alice/c_api/libisaac_c_api.so -
/packages/sight/libsight_module.so
以下是使用 GCC 编译的命令行示例:
gcc c_api_example.c \
-L./engine/alice/c_api -lisaac_c_api \
-L./packages/sight -lsight_module \
-o c_api_example
export LD_LIBRARY_PATH=./engine/alice/c_api:./packages/sight:$LD_LIBRARY_PATH
./c_api_example
此示例显示了一个简单的ping-pong操作,您可以在其中通过 C API 将消息发送到最小的 Isaac 应用程序,并通过 C API 接收这些相同的消息。
启动和停止应用程序
每个使用 C API 的 Isaac 应用程序都需要一个 JSON 应用程序文件; 例如,上面的示例具有相应的 viewer.app.json 和 depth.app.json 文件。 使用 JSON 应用程序文件的应用程序图来定义您希望使用 C API 与之通信的节点。
要启动 Isaac 应用程序,请按如下方式加载 JSON 文件:
isaac_handle_t app;
isaac_create_application("", "path/to/config.app.json", 0, 0, 0, 0, &app);
isaac_start_application(app);
要关闭应用程序,请使用以下命令:
isaac_stop_application(app);
isaac_destroy_application(&app);
向 Isaac 应用程序发布消息
Isaac 在内部使用 Cap’n Proto 消息; 但是,由于这种消息格式并未得到普遍支持,因此 C API 将消息有效负载公开为 JSON。 如果接收消息的节点需要 Cap’n Proto 消息,则需要启用消息转换为 Cap’n Proto 格式。
按照以下步骤向 Isaac 发布消息:
-
按如下方式创建新消息:
isaac_uuid_t uuid; isaac_create_message(app, &uuid); isaac_write_message_json(app, &uuid, &json); -
设置消息的原型 ID 并启用 JSON 到原型的转换,如下所示:
isaac_set_message_proto_id(app, &uuid, proto_id); isaac_set_message_auto_convert(app, &uuid, isaac_message_type_proto);isaac_set_message_proto_id()调用需要消息的原型 ID。 要确定消息的原型 ID,请将消息类型添加到//apps/tutorials/c_api:typeid应用程序,然后通过bazel run //apps/tutorials/c_api:typeid运行该应用程序。 原型 ID 将显示在终端上。 -
使用
isaac_publish_message()调用将消息发布到 Isaac 应用程序节点。 该消息将作为 Cap’n Proto 消息转发到节点。isaac_publish_message(app, "node_name", "component_name", "key", &uuid);有关消息发布的示例,请参见 //apps/tutorials/c_api/viewer.c。
从 Isaac 应用程序接收消息
要从 JSON 应用程序文件中定义的任何节点接收最新消息,请使用以下调用:
isaac_receive_latest_new_message(app, "node_name", "component_name", "key", &uuid);
isaac_receive_latest_new_message() 调用返回“成功”代码 (isaac_error_success) 或“no message available”代码 (isaac_error_no_message_available)。
获取消息内容如下:
isaac_const_json_t json = isaac_create_null_const_json();
isaac_get_message_json(app, &uuid, &json);
如果消息源使用 Cap’n Proto 发布消息,消息会自动转换为 JSON。
处理完消息后,立即使用 isaac_release_message() 调用,它允许 Isaac 回收用于消息的任何资源:
isaac_release_message(app, &uuid);
如果要保留任何消息数据,请在发布消息之前复制它。
有关接收消息的示例,请参见 //apps/tutorials/c_api/depth.c。
语言环境设置
Isaac 应用程序的区域设置自动设置为 en_US.UTF-8,以防止在将 JSON 消息与原型消息相互转换时出现十进制转换错误。 因此,为与 Isaac 节点通信而生成的 JSON 文件必须与 en_US.UTF-8 语言环境兼容。
示例消息
执行以下命令在 /tmp 文件夹中生成示例 JSON 文件:
bazel run apps/samples/proto_to_json
这些 JSON 文件(详见下文)对应于 Isaac 中使用的通用原型。
ImageProto
运行上面的命令后,在生成的文件/tmp/color_camera_proto.json中可以找到需要的JSON格式。 为方便起见,将 JSON 粘贴在此处:
{
"channels": 3,
"cols": 1920,
"dataBufferIndex": 0,
"elementType": "uint8",
"rows": 1080
}
这条 Cap’n Proto 消息的名称是 ImageProto,原型 ID 是 16240193334533147313。
有关二维缓冲区布局的说明,请参阅图像缓冲区部分。
RangeScanProto
-
文件名:
range_scan_proto.json -
原型描述:RangeScanProto
-
原型编号:
11901202900662173387
有关缓冲区布局的说明,请参阅下面的张量缓冲区部分。 在这种情况下,有一个缓冲区用于范围,另一个缓冲区用于强度。 在示例 JSON 中,缓冲区大小为 16x8,因为垂直光束角 (theta) 列表有 16 个成员,而有八个水平射线切片(与 phi 角相关联)。
StateProto (messages::DifferentialBaseDynamics)
-
文件名:/tmp/differential_base_state_proto.json
-
原型描述:StateProto
-
原型编号:13177870757040999364
有关缓冲区布局的说明,请参阅下面的张量缓冲区部分。 在这种情况下,缓冲区是一个 1x1x4 张量,其中包含以下值:
-
线速度
-
角速度
-
直线加速度
-
角加速度
StateProto (messages::DifferentialBaseControl)
-
文件名:differential_base_control_proto.json
-
原型描述:StateProto
-
原型编号:13177870757040999364
有关缓冲区布局的说明,请参阅下面的张量缓冲区部分。 在这种情况下,缓冲区是一个 1x1x2 张量,其中包含以下值:
-
线速度
-
角速度
缓冲区布局
带有缓冲区的消息原型必须存储包含数据的缓冲区的索引。 例如,ImageProto 中的“dataBufferIndex”是包含图像数据的缓冲区的索引。
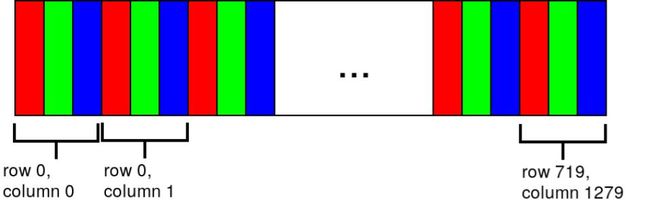
图像缓冲器
下面是 720p RGB 图像缓冲区的图示。 每个(行、列)位置都包含有关像素的信息。 Isaac 图像缓冲区按行优先顺序排列。
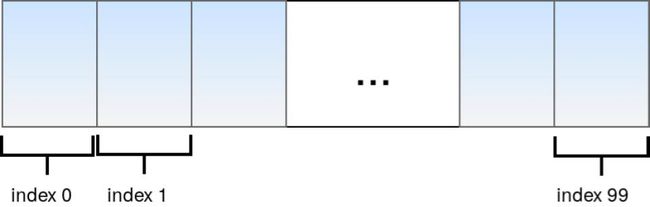
张量缓冲器
在一维张量中,元素按顺序堆叠:
二维张量类似于上面描述的图像缓冲区:每个 RGB 值都可以表示为一个元组元素。 如果图像是灰度图像,则每个元素都将是一个数字。 二维张量缓冲区的第一个元素索引为 (0,0),第二个元素索引为 (0,1),依此类推。
类似地,三维张量具有以下顺序:
(0, 0, 0), (0, 0, 1), (0, 0, 2), …. (0, 1, 0) …… (1, 0, 0) … (max_0, max_1, max_2),
其中 max_i 是维度“i”中的最大索引。
3D 张量可以表示 RGB 图像,每个(行、列、通道)索引指向 0 到 255 之间的值。