【Ubuntu18.04安装px4+mavros(解决mavros报错问题)】
Ubuntu18.04安装px4+mavros(解决mavros报错问题)
- 安装ros-melodic
- 重新安装gazebo9.19
- 安装mavros
- 安装px4
我的电脑为联想R7000P2021款,之前已经安装好Ubuntu18.04双系统并且安装了ROS,现因实验室需要进行无人机的仿真,根据网上的相关教程安装好了mavros和px4,但在最后测试px4时候出现了以下错误

尝试了一天最后发现原来是因为gazebo版本问题,ubuntu18.04安装ros-melodic时gazebo默认版本为9.0,升级到最新的gazebo9.19版本即可。
安装ros-melodic
因为已安装,略。
重新安装gazebo9.19
1.卸载gazebo9.0
sudo apt-get remove gazebo9*
2.安装gazebo9.19
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
cat /etc/apt/sources.list.d/gazebo-stable.list#如果出现deb http://packages.osrfoundation.org/gazebo/ubuntu-stable xenial main表示没问题
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get install gazebo9=9.1*
3.安装过后输入gazebo,如果不能弹出gazebo窗口,且报错类似
error: gzserver: symbol lookup error: /usr/lib/x86_64-linux-gnu/libsdformat.so.4: undefined symbol: _ZN8ignition4math15SemanticVersionC1ERKNSt7__cxx1112basic_stringIcSt11char_traitsIcESaIcEEE
执行
sudo apt upgrade libignition-math2
4.安装相关依赖项
sudo apt-get install gazebo9*
sudo apt-get install libgazebo9-dev
sudo apt-get install ros-melodic-gazebo-ros
sudo apt-get install ros-melodic-gazebo-ros-control
sudo apt-get install ros-melodic-gazebo-ros-pkgs
安装mavros
sudo apt install ros-melodic-mavros ros-melodic-mavros-extras
wget https://gitee.com/robin_shaun/XTDrone/raw/master/sitl_config/mavros/install_geographiclib_datasets.sh
sudo chmod a+x ./install_geographiclib_datasets.sh
sudo ./install_geographiclib_datasets.sh #这步需要装一段时间,请耐心等待PX4配置
安装px4
这里使用gitee安装,加快安装速度
1.下载源码
cd ~
git clone https://gitee.com/robin_shaun/PX4_Firmware
cd PX4_Firmware
git checkout -b xtdrone/dev v1.11.0-beta1
bash ./Tools/setup/ubuntu.sh --no-nuttx --no-sim-tools
2.将.gitmodules替换为如下内容(在PX4_Firmware文件夹中ctrl+h查看隐藏文件)
[submodule "mavlink/include/mavlink/v2.0"]
path = mavlink/include/mavlink/v2.0
url = https://gitee.com/robin_shaun/c_library_v2.git
branch = master
[submodule "src/drivers/uavcan/libuavcan"]
path = src/drivers/uavcan/libuavcan
url = https://gitee.com/robin_shaun/uavcan.git
branch = px4
[submodule "Tools/jMAVSim"]
path = Tools/jMAVSim
url = https://gitee.com/robin_shaun/jMAVSim.git
branch = master
[submodule "Tools/sitl_gazebo"]
path = Tools/sitl_gazebo
url = https://gitee.com/robin_shaun/sitl_gazebo.git
branch = master
[submodule "src/lib/matrix"]
path = src/lib/matrix
url = https://gitee.com/robin_shaun/Matrix.git
branch = master
[submodule "src/lib/ecl"]
path = src/lib/ecl
url = https://gitee.com/robin_shaun/ecl.git
branch = master
[submodule "boards/atlflight/cmake_hexagon"]
path = boards/atlflight/cmake_hexagon
url = https://gitee.com/robin_shaun/cmake_hexagon.git
branch = px4
[submodule "src/drivers/gps/devices"]
path = src/drivers/gps/devices
url = https://gitee.com/robin_shaun/GpsDrivers.git
branch = master
[submodule "src/modules/micrortps_bridge/micro-CDR"]
path = src/modules/micrortps_bridge/micro-CDR
url = https://gitee.com/robin_shaun/micro-CDR.git
branch = px4
[submodule "platforms/nuttx/NuttX/nuttx"]
path = platforms/nuttx/NuttX/nuttx
url = https://gitee.com/robin_shaun/NuttX.git
branch = px4_firmware_nuttx-9.1.0+
[submodule "platforms/nuttx/NuttX/apps"]
path = platforms/nuttx/NuttX/apps
url = https://gitee.com/robin_shaun/NuttX-apps.git
branch = px4_firmware_nuttx-9.1.0+
[submodule "platforms/qurt/dspal"]
path = platforms/qurt/dspal
url = https://gitee.com/robin_shaun/dspal.git
[submodule "Tools/flightgear_bridge"]
path = Tools/flightgear_bridge
url = https://gitee.com/robin_shaun/PX4-FlightGear-Bridge.git
branch = master
[submodule "Tools/jsbsim_bridge"]
path = Tools/jsbsim_bridge
url = https://gitee.com/robin_shaun/px4-jsbsim-bridge.git
[submodule "src/examples/gyro_fft/CMSIS_5"]
path = src/examples/gyro_fft/CMSIS_5
url = https://gitee.com/mirrors/CMSIS_5
3.再次执行子模块更新指令
git submodule update --init --recursive
4.编译
make px4_sitl_default gazebo
终端中不报错,gazebo中有无人机即测试成功。
gazebo黑屏卡住时可以ctrl+c关闭后重新打开即可。
5.配置环境变量,注意与自己的路径相对应
source ~/PX4_Firmware/Tools/setup_gazebo.bash ~/PX4_Firmware/ ~/PX4_Firmware/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4_Firmware
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4_Firmware/Tools/sitl_gazebo
6.测试
cd ~/PX4_Firmware
roslaunch px4 mavros_posix_sitl.launch
此时gazebo中显示无人机,机翼不转则表示与mavros通讯成功,此时终端中显示大致如下。

也可使用一下代码验证
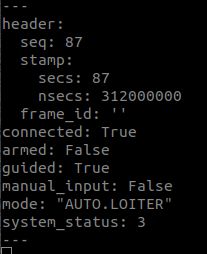
rostopic echo /mavros/state
若显示connected: True,则通讯成功