深度学习方法中的其他学习方式
除了常规的预测,结果,深度学习中还有哪些不太常规的学习方式呢?
分两步优化法,两个不同时期的损失函数
深度学习与ACM的结合
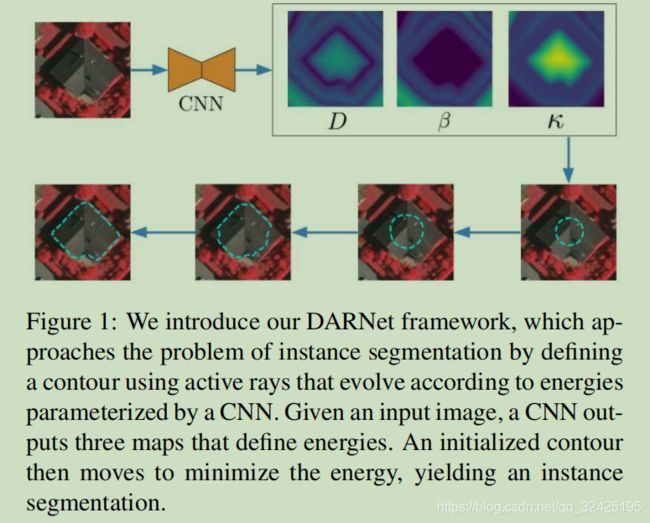
CNN做图像分割的缺点:经多次下采样后,丢失高频信息,比如边缘、细小结构;传统的active contour模型的优点:曲线演化,擅长边缘定位;所以将CNN与active contour结合,是一种互补和促进。
https://zhuanlan.zhihu.com/p/163811140?utm_source=wechat_session
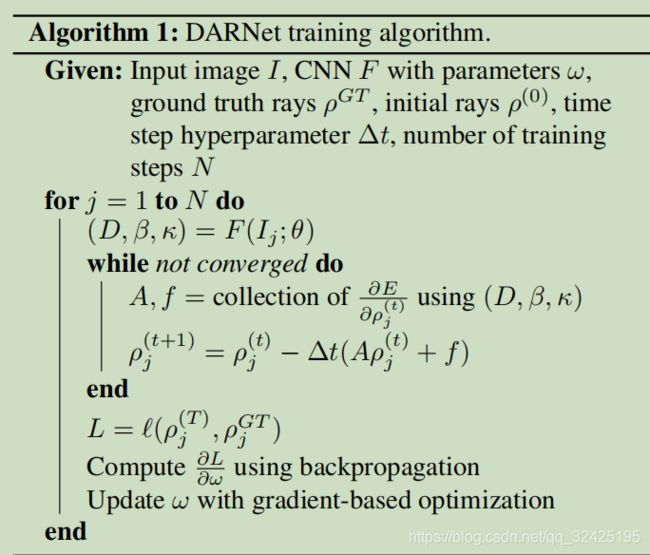
DARNet: Deep Active Ray Network for Building Segmentation
(1)Active Ray的轮廓表示:

每一个边缘点都用ci表示
所有边缘点的能量项的公式记作:

它是所有边缘点能量的加和。每个边缘点的能量由3分布组成,分别代表我们希望预测的轮廓点是沿着边缘的;预测的轮廓的曲率要小,不要歪歪扭扭;轮廓是从很小的初始化开始,向外扩展的
每个点的3个能量项介绍
Data term:每个边缘点的ci的Data tern记作D(ci),其中D是CNN输出的特征图,ci表示位置。
Data term:边缘处预测的值要尽量小->则D(ci)的值就会比较小->E(ci)的值比较小,从而起到最小化能量函数的目的
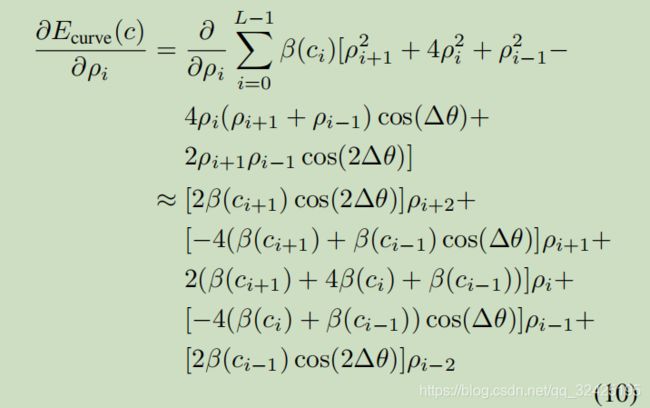
Curvature Term曲率项:

β(ci)是CNN输出的特征图β在ci位置的值,|ci+1 1 2ci + cii1|2是轮廓的二阶导数;
当预测输出的β比较大时,这个能量项让边缘拉直(二阶导数小),从而整体损失小
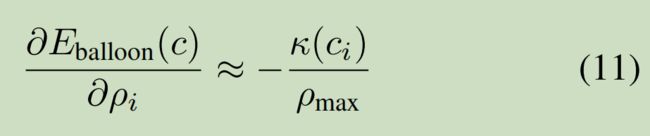
balloon term从小扩展项:
![]()
k是CNN输出的特征图; ρi是轮廓点的弧长,ρmax是当前轮廓的最大弧长;
该能量项希望轮廓更新时,从参考点逐步向外推进;
这样设置的目的是仅仅有Data term,不能够充分引导轮廓和边缘贴近,尤其是是参考点离边缘较远;曲率项的副作用是收缩轮廓,这里为了排除这个副作用
原理:ρi变大,ρi/ρmax就会变大,κ(ci)(1 1 ρi/ρmax)变小–>能量项变小
CNN输出D,B,K后,我们通过最小化能量函数来获得最优边界,即找到该建筑对应的所有的ci
通过能量项对ci求导–>ci是用极坐标表示的,ci=f(θi,ρi),θ是通过按一定角度分离选定的,所以就相当于只对ρi求导->对ρi求导,可以进一步转化为对欧几里得坐标系的x,y求导
pcos(i∆θ)=x,可以得出∂x/∂p=cos(i∆θ);同理,∂y/∂p=sin(i∆θ)

最后,得到整个能量项E对每个pi的偏导数:
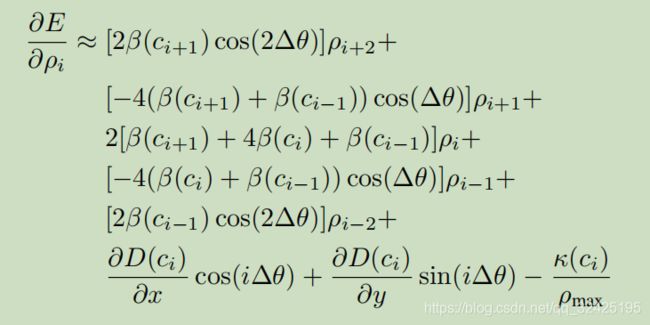
对所有pi的偏导数:

为了求解上述的方程,引入一个时间变量∆t,通过不断迭代让变量收敛,而得到最优解
![]()
当得到最优解后,就得到了预测的p_pre.使用相同的参考点和参考角度,可以得到p_gt,通过p_pre和p_gt间的L1_loss.

code
https://github.com/dcheng-utoronto/darnet
def run_vaihingen(split_num):
train_baseline_vaihingen(split_num)
pretrain_vaihingen(split_num)
train_vaihingen(split_num)
eval_baseline_vaihingen(split_num)
eval_vaihingen(split_num)
def train_vaihingen(split_num=1):
importlib.reload(dar_package.config)
config = dar_package.config.config
print("Train vaihingen {}".format(split_num))
checkpoint_path = train_contours.run(config['vaihingen_exp_{}'.format(split_num)],
config,
vaihingen.VaihingenDataset,
DRNContours,
split_num)
model_and_loss = ModelAndLoss(Network, restore).to(device)
输入:sample[‘image’]
输出:beta, data, kappa
损失计算:
初始点的中心坐标和弧长是gt给定的,init_contour:给定弧长,默认为20,init_contour_origin给定中心坐标;
loss, contour_x, contour_y, contour_rho = self.distance_loss(
sample['init_contour'],
sample['interp_radii'],
sample['init_contour_origin'],
beta,
data,
kappa,
sample['interp_angles'],
sample['delta_angles']
)
几个字段解析:
init_contour:根据init_contour_radius=20, discretize_points=60,得到init_contour为一个列表,[20,20,20,......20],共60项目
interp_radii:gt raddi,根据interp_angles和实际的轮廓计算得到实际的弧长列表,共60项,与discretize_points=60相对应
'init_contour_origin:应该是一个坐标,从gt_mask中随机选择的一个点
interp_angles:是一个列表,将360度平均且分为60份,[0,6,12,....360]共60项
delta_angles:角度间隔6
获得初始点中心坐标origin和初始点的范围后,开始计算实际的坐标点(注意:每个点的角度是给定的,初始中心点是给定的,只有弧长在不断变化)
contour_x = origin[:, 0].unsqueeze(1) + rho * cos_theta
contour_y = origin[:, 1].unsqueeze(1) + rho * sin_theta
不断迭代来最优化求解,直到达到最大次数(max_steps=128),返回计算得到的每个角度对应的最佳弧长
然后,用L1 loss和gt轮廓计算的弧长做损失,优化网络。
根据初始点的坐标和范围,通过预测的beta, data, kappa,得到估计的轮廓:result
result = evolve_active_rays_fast(
rho_init, beta, data, kappa,
theta, delta_theta, rho_target, origin,
delta_t=self.delta_t, max_steps=self.max_steps, debug_hist=debug_hist)
Eval的过程:也是需要
rho_diff, _, new_rho_x, new_rho_y, init_x, init_y, output = model_and_loss(sample)