使用Pytorch实现ResNet
转载:https://blog.csdn.net/kongshuchen/article/details/72285709
ResNet要解决的问题
深度学习网络的深度对最后的分类和识别的效果有着很大的影响,所以正常想法就是能把网络设计的越深越好,但是事实上却不是这样,常规的网络的堆叠(plain network)在网络很深的时候,效果却越来越差了。
其中的原因之一即是网络越深,梯度消失的现象就越来越明显,网络的训练效果也不会很好。 但是现在浅层的网络(shallower network)又无法明显提升网络的识别效果了,所以现在要解决的问题就是怎样在加深网络的情况下又解决梯度消失的问题。
ResNet的解决方案
ResNet引入了残差网络结构(residual network),通过残差网络,可以把网络层弄的很深,据说现在达到了1000多层,最终的网络分类的效果也是非常好,残差网络的基本结构如下图所示
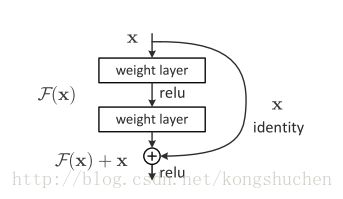
ResNet通过在输出个输入之间引入一个shortcut connection,而不是简单的堆叠网络,这样可以解决网络由于很深出现梯度消失的问题,从而可可以把网络做的很深,ResNet其中一个网络结构如下图所示

下面用Pytorch来实现ResNet:
# -*- coding:utf-8 -*-
import torch
import torch.nn as nn
import torchvision.datasets as dsets
import torchvision.transforms as transforms
from torch.autograd import Variable
# Image Preprocessing
transform = transforms.Compose([
transforms.Scale(40),
transforms.RandomHorizontalFlip(),
transforms.RandomCrop(32),
transforms.ToTensor()])
# CIFAR-10 Dataset
train_dataset = dsets.CIFAR10(root='./data/',
train=True,
transform=transform,
download=True)
test_dataset = dsets.CIFAR10(root='./data/',
train=False,
transform=transforms.ToTensor())
# Data Loader (Input Pipeline)
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=100,
shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset=test_dataset,
batch_size=100,
shuffle=False)
# 3x3 Convolution
def conv3x3(in_channels, out_channels, stride=1):
return nn.Conv2d(in_channels, out_channels, kernel_size=3,
stride=stride, padding=1, bias=False)
# Residual Block
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride=1, downsample=None):
super(ResidualBlock, self).__init__()
self.conv1 = conv3x3(in_channels, out_channels, stride)
self.bn1 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(out_channels, out_channels)
self.bn2 = nn.BatchNorm2d(out_channels)
self.downsample = downsample
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
# ResNet Module
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes=10):
super(ResNet, self).__init__()
self.in_channels = 16
self.conv = conv3x3(3, 16)
self.bn = nn.BatchNorm2d(16)
self.relu = nn.ReLU(inplace=True)
self.layer1 = self.make_layer(block, 16, layers[0])
self.layer2 = self.make_layer(block, 32, layers[0], 2)
self.layer3 = self.make_layer(block, 64, layers[1], 2)
self.avg_pool = nn.AvgPool2d(8)
self.fc = nn.Linear(64, num_classes)
def make_layer(self, block, out_channels, blocks, stride=1):
downsample = None
if (stride != 1) or (self.in_channels != out_channels):
downsample = nn.Sequential(
conv3x3(self.in_channels, out_channels, stride=stride),
nn.BatchNorm2d(out_channels))
layers = []
layers.append(block(self.in_channels, out_channels, stride, downsample))
self.in_channels = out_channels
for i in range(1, blocks):
layers.append(block(out_channels, out_channels))
return nn.Sequential(*layers)
def forward(self, x):
out = self.conv(x)
out = self.bn(out)
out = self.relu(out)
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.avg_pool(out)
out = out.view(out.size(0), -1)
out = self.fc(out)
return out
resnet = ResNet(ResidualBlock, [2, 2, 2, 2]).cuda()
# Loss and Optimizer
criterion = nn.CrossEntropyLoss()
lr = 0.001
optimizer = torch.optim.Adam(resnet.parameters(), lr=lr)
# Training
for epoch in range(80):
for i, (images, labels) in enumerate(train_loader):
images = Variable(images.cuda())
labels = Variable(labels.cuda())
# Forward + Backward + Optimize
optimizer.zero_grad()
outputs = resnet(images)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
if (i + 1) % 100 == 0:
print("Epoch [%d/%d], Iter [%d/%d] Loss: %.4f" % (epoch + 1, 80, i + 1, 500, loss.data[0]))
# Decaying Learning Rate
if (epoch + 1) % 20 == 0:
lr /= 3
optimizer = torch.optim.Adam(resnet.parameters(), lr=lr)
# Test
correct = 0
total = 0
for images, labels in test_loader:
images = Variable(images.cuda())
outputs = resnet(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum()
print('Accuracy of the model on the test images: %d %%' % (100 * correct / total))
# Save the Model
torch.save(resnet.state_dict(), 'resnet.pkl')
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
运行结果如下:
Files already downloaded and verified
Epoch [1/80], Iter [100/500] Loss: 1.6537
Epoch [1/80], Iter [200/500] Loss: 1.5279
Epoch [1/80], Iter [300/500] Loss: 1.3174
Epoch [1/80], Iter [400/500] Loss: 1.1979
Epoch [1/80], Iter [500/500] Loss: 1.1882
Epoch [2/80], Iter [100/500] Loss: 1.1613
Epoch [2/80], Iter [200/500] Loss: 1.0430
Epoch [2/80], Iter [300/500] Loss: 0.9967
Epoch [2/80], Iter [400/500] Loss: 1.0057
...
Accuracy of the model on the test images: 85 %
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13