ResNeXt模型——pytorch实现
论文传送门:Aggregated Residual Transformations for Deep Neural Networks
前置文章:ResNet模型——pytorch实现
ResNeXt的改进:
在ResNet网络的基础上,对Residual结构进行了改进。主要改进是将输入特征分成C个组,进行C个Conv paths计算得到C个输出,最后输出由C个输出相加(再加上shortcut x)。实现方法是将Residual结构中的第二个卷积替换为Group Convolution(组卷积)。
改进的Residual结构:
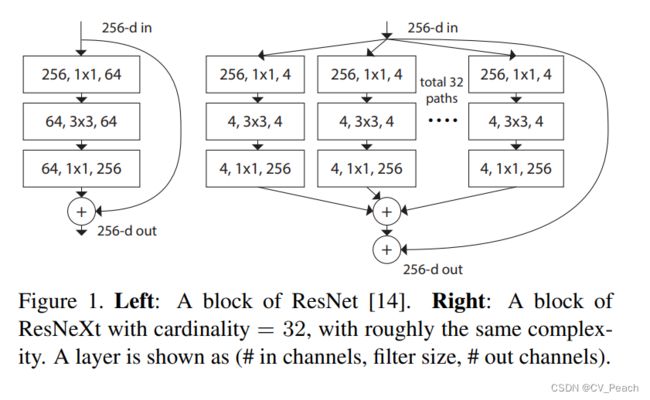
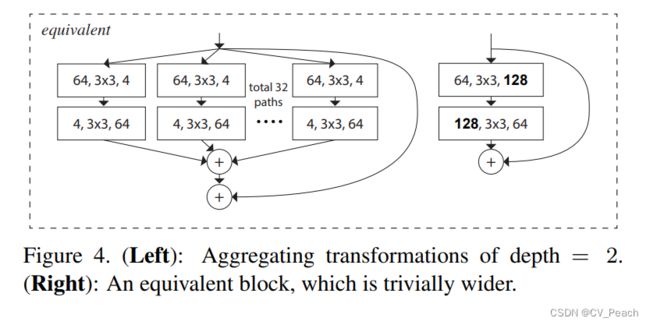
注意到,以下三种结构在数学上等价,则仅需将第二个Conv替换为Group Conv。

对于ResNet18、34所使用的Residual结构,进行多paths结构的改进没有太大意义,其数学上等价于增加卷积核个数(输出通道数)。
Group Convolution:
标准卷积是针对输入特征图的全部通道进行计算,即每个卷积核的长度与特征图的通道数保持一致。
组卷积是指将输入特征图在通道维度进行分组,对每组特征图单独进行标准卷积,然后将各组计算的结果拼接在一起,得到最终输出。
可以发现,组卷积相比于标准卷积参数量更小。
注意,当组卷积的组数等于输入特征图的通道数时,此时组卷积就是深度可分离卷积(Depthwise Separable Convolution);当组卷积的组数等于1时,此时组卷积就是标准卷积。
ResNeXt50的结构:
整体结构与ResNet50保持一致,其中的Residual结构中,卷积的中间通道数变为原来的2倍,第二个卷积使用Group Convolution,C表示组数。

import torch
import torch.nn as nn
class BasicBlock(nn.Module): # 定义残差块,resnet18、resnet34使用此残差块
expansion = 1 # 残差操作维度变化倍数
def __init__(self, in_channel, out_channel, stride=1, downsample=None): # 初始化方法
super(BasicBlock, self).__init__() # 继承初始化方法
self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=out_channel, kernel_size=3, stride=stride,
padding=1, bias=False) # conv操作
self.bn1 = nn.BatchNorm2d(num_features=out_channel) # bn操作
self.conv2 = nn.Conv2d(in_channels=out_channel, out_channels=out_channel, kernel_size=3, stride=1, padding=1,
bias=False) # conv操作
self.bn2 = nn.BatchNorm2d(num_features=out_channel) # bn操作
self.relu = nn.ReLU(inplace=True) # relu激活函数
self.downsample = downsample # 是否下采样
def forward(self, x): # 前传函数
identity = x # 原始x
if self.downsample: # 如果下采样
identity = self.downsample(x) # 残差边存在conv操作,x-->x'
x = self.conv1(x) # conv操作
x = self.bn1(x) # bn操作
x = self.relu(x) # relu激活函数
x = self.conv2(x) # conv操作
x = self.bn2(x) # bn操作
x += identity # F(x)+x/x'
x = self.relu(x) # relu激活函数
return x
class Bottleneck(nn.Module): # 定义残差块,renet50、resnet101、resnet152使用此残差块
expansion = 4 # 残差操作维度变化倍数
def __init__(self, in_channel, out_channel, stride=1, downsample=None, groups=1, base_width=64): # 初始化方法
super(Bottleneck, self).__init__() # 继承初始化方法
width = int(in_channel * (base_width / 64.0)) * groups # F(x)第二个卷积的通道数
self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=width, kernel_size=1, stride=1,
bias=False) # conv操作
self.bn1 = nn.BatchNorm2d(num_features=width) # bn操作
self.conv2 = nn.Conv2d(in_channels=width, out_channels=width, groups=groups, kernel_size=3, stride=stride,
padding=1, bias=False) # conv操作,若为ResNeXt网络,则这里为group conv操作
self.bn2 = nn.BatchNorm2d(num_features=width) # bn操作
self.conv3 = nn.Conv2d(in_channels=width, out_channels=out_channel * self.expansion, kernel_size=1, stride=1,
bias=False) # conv操作
self.bn3 = nn.BatchNorm2d(num_features=out_channel * self.expansion) # bn操作
self.relu = nn.ReLU(inplace=True) # relu激活函数
self.downsample = downsample # 是否下采样
def forward(self, x): # 前传函数
identity = x # 原始x
if self.downsample: # 如果下采样
identity = self.downsample(x) # 残差边存在conv操作,x-->x'
x = self.conv1(x) # conv操作
x = self.bn1(x) # bn操作
x = self.relu(x) # relu激活函数
x = self.conv2(x) # conv操作
x = self.bn2(x) # bn操作
x = self.relu(x) # relu激活函数
x = self.conv3(x) # conv操作
x = self.bn3(x) # bn操作
x += identity # F(x)+x/x'
x = self.relu(x) # relu激活函数
return x
class ResNet(nn.Module): # 定义resnet模型
def __init__(self, block, layers, num_classes, in_channel=3, channel=64, groups=1, base_width=64): # 初始化方法
super(ResNet, self).__init__() # 继承初始化方法
self.in_channel = in_channel # 输入通道数,应为图片通道数
self.channel = channel # 第一次conv输出通道数
self.groups = groups # 分组卷积组数,ResNet默认为1,即不采用组卷积,ResNeXt不为1,采用组卷积
self.base_width = base_width # 每组通道数(第一个Block)
self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=channel, kernel_size=7, stride=2, padding=3,
bias=False) # conv操作
self.bn1 = nn.BatchNorm2d(self.channel) # bn操作
self.relu = nn.ReLU(inplace=True) # relu激活函数
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1) # maxpool操作
self.layer1 = self._make_layer(block, 64, layers[0]) # 第一块残差集合,由基本的残差块组成
self.layer2 = self._make_layer(block, 128, layers[1], stride=2) # 第二块残差集合,由基本的残差块组成
self.layer3 = self._make_layer(block, 256, layers[2], stride=2) # 第三块残差集合,由基本的残差块组成
self.layer4 = self._make_layer(block, 512, layers[3], stride=2) # 第四块残差集合,由基本的残差块组成
self.avgpool = nn.AdaptiveAvgPool2d(output_size=(1, 1)) # avgpool操作
self.fc = nn.Linear(512 * block.expansion, num_classes) # linear映射
for m in self.modules(): # 遍历模型结构
if isinstance(m, nn.Conv2d): # 如果当前结构是卷积操作
nn.init.kaiming_normal_(m.weight, mode="fan_out", nonlinearity="relu") # 使用kaiming初始化方法
def _make_layer(self, block, channel, blocks, stride=1): # 定义函数,用于生成模型结构
downsample = None # 默认不对原始x进行操作
if stride != 1 or self.channel != channel * block.expansion: # 如果卷积步长不为1或卷积前后通道数不一致,则需要对原始x进行操作
downsample = nn.Sequential(
nn.Conv2d(in_channels=self.channel, out_channels=channel * block.expansion, kernel_size=1, # conv操作
stride=stride, bias=False),
nn.BatchNorm2d(num_features=channel * block.expansion) # bn操作
)
layers = [] # 列表用于存放模型结构
layers.append(block(self.channel, channel, downsample=downsample, stride=stride, groups=self.groups,
base_width=self.base_width)) # 模型追加block结构
self.channel = channel * block.expansion # 通道数转换为卷积后输出通道数
for _ in range(1, blocks): # 进行blocks次循环
layers.append(block(self.channel, channel, groups=self.groups, base_width=self.base_width)) # 模型追加block结构
return nn.Sequential(*layers) # 返回模型结构
def forward(self, x): # 前传函数
x = self.conv1(x) # conv操作
x = self.bn1(x) # bn操作
x = self.relu(x) # relu激活函数
x = self.maxpool(x) # maxpool激活函数
x = self.layer1(x) # 第一块残差集合
x = self.layer2(x) # 第二块残差集合
x = self.layer3(x) # 第三块残差集合
x = self.layer4(x) # 第四块残差集合
x = self.avgpool(x) # avgpool操作
x = torch.flatten(x, 1) # 将多维特征映射成一维特征向量
x = self.fc(x) # linear映射
return x
def resnet18(num_classes=2): # 定义函数,生成resnet18模型
return ResNet(BasicBlock, [2, 2, 2, 2], num_classes=num_classes) # resnet18使用BasicBlock基础残差块,四块残差集合使用的残差块数量为2,2,2,2
def resnet34(num_classes=2): # 定义函数,生成resnet34模型
return ResNet(BasicBlock, [3, 4, 6, 3], num_classes=num_classes) # resnet18使用BasicBlock基础残差块,四块残差集合使用的残差块数量为3,4,6,3
def resnet50(num_classes=2): # 定义函数,生成resnet50模型
return ResNet(Bottleneck, [3, 4, 6, 3], num_classes=num_classes) # resnet18使用Bottleneck基础残差块,四块残差集合使用的残差块数量为3,4,6,3
def resnet101(num_classes=2): # 定义函数,生成resnet101模型
return ResNet(Bottleneck, [3, 4, 23, 3],
num_classes=num_classes) # resnet18使用Bottleneck基础残差块,四块残差集合使用的残差块数量为3, 4, 23, 3
def resnet152(num_classes=2): # 定义函数,生成resnet152模型
return ResNet(Bottleneck, [3, 8, 36, 3],
num_classes=num_classes) # resnet18使用Bottleneck基础残差块,四块残差集合使用的残差块数量为3, 8, 36, 3
def resnext50_32x4d(num_classes=2): # 定义函数,生成resnext50模型
return ResNet(Bottleneck, [3, 4, 6, 3], # resnext50使用Bottleneck基础残差块,四块残差集合使用的残差块数量为3, 4, 6, 3
num_classes=num_classes,
groups=32, # 组卷积组数为32
base_width=4) # 每组的通道数为4(第一个Block)
def resnext101_32x8d(num_classes=2): # 定义函数,生成resnext101模型
return ResNet(Bottleneck, [3, 4, 23, 3], # resnext101使用Bottleneck基础残差块,四块残差集合使用的残差块数量为3, 4, 23, 3
num_classes=num_classes,
groups=32, # 组卷积组数为32
base_width=8) # 每组的通道数为8(第一个Block)