PPQ-Trajectory: Spatio-temporal Quantization for Querying in Large Trajectory Repositories
PPQ-Trajectory: Spatio-temporal Quantization for Querying in Large Trajectory Repositories
摘要:提出了一种基于时空量化的大动态轨迹数据查询解决方案——ppq -轨迹。PPQ-轨迹包括一个分区预测量化器(PPQ),它生成带有自相关和基于空间邻近的分区的错误有界码本。代码本被索引以在压缩轨迹上运行近似和精确的时空查询。PPQ-trajectory包含一个坐标四叉树编码,用于支持精确查询的码本。使用基于增量时间分区的索引来避免查询期间的轨迹完全重构。针对真实轨迹数据集的时空查询提出了一套广泛的实验结果。ppq -轨迹在几个性能指标方面显示了比替代方案的显著改进,包括当摘要直接用于提供近似查询结果时,结果的准确性,当摘要用作索引时,时空路径查询可以被回答的空间偏差,以及写摘要所花的时间。在摘要的质量和压缩比上也显示了优越的结果。
1.背景
1)轨迹数据的映射和转换过程降低了精度,并导致对细节查询的支持有限
2)大多数解决方案都对全轨迹数据进行离线压缩
3)现有的压缩表示不能直接用于回答时空查询,除非进行代价高昂的解压缩过程。
方案:
我们提出了一个基于时空量化的ppq -轨迹,实现生成一个紧凑的表示,并支持对大轨迹数据的广泛查询
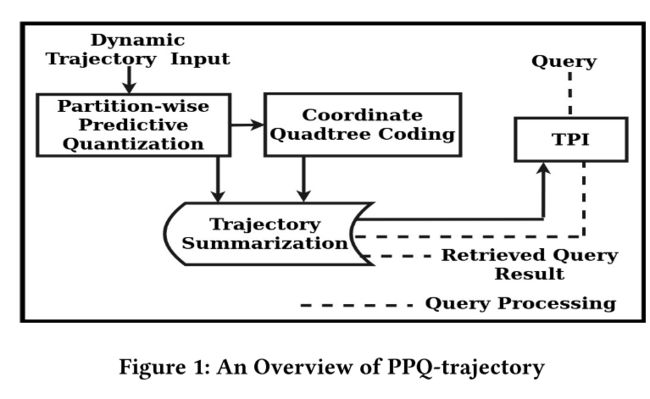
该框架分为三个部分,第一个部分是段与段成对的预测量化器,该量化器能够生成错误有界的summarization。这个量化器由码本和预测系数组成
第二部分是对量化引起的误差空间进行坐标四叉树编码(CQC),从而能够精确地重建轨迹。这两部分构成了轨迹数据的总结,
第三部分是基于时间分区的索引(TPI),用于组织量化的时空数据给定一个查询,TPI用于裁剪数据空间并生成候选轨迹列表,其重构点可以从摘要中计算出来。
总的来说,PPQ-trajectory生成并使用原始数据序列的索引摘要来支持高效的分析,从简单的查询(如给定时间经过某个位置(,)的车辆)到更复杂的分析任务(如预测实体的未来位置)。
2. ONLINE QUANTIZATION IN PPQ-TRAJECTORY

2.1 Error-bounded Predictive Quantization
提出误差有界预测量化器(E-PQ)来获得一个紧凑的轨迹码本。通过训练数据学习预测函数,并通过向量量化器对预测误差进行编码,将预测误差分配给其聚类中最近的质心。
![]()
![]()

Partition-wise Predictive Quantization
我们现在给出量化器,它划分轨迹点,并对每个分区应用E-PQ。我们现在给出量化器,它划分轨迹点,并对每个分区应用E-PQ。

重复分区过程,直到所有分区分别满足式7和8的空间相似性和自相关相似性
对于空间邻近性,N任意点与N质心的偏差应小于



LOCAL CODING IN ERROR-BOUNDED CODEBOOK
使用错误有界的代码本,重构的值(ˆ,ˆ)保证在圆1内,如图2所示。本文采用坐标四叉树编码(CQC)对(,)和(ˆ,ˆ)之间的空间偏差进行编码,以减少摘要的信息损失。

4.1 Coordinate Quadtree Coding
坐标四叉树的构建过程,作为CQC的基础。对于CQC,实际坐标是它访问的节点值的总和
其中'表示填充子空间的
Trajectory Reconstruction with CQC
6 EXPERIMENTAL EVALUATION
Compared Methods. 我们实现了文献中替代方法的扩展版本:Product quantized [19], Residual quantized [8], REST[44]和TrajStore[10]。PQ和RQ用文中提出的索引方法进行扩展
6.2 Query Performance
1)Spatio-temporal Range Query.
ppq -轨迹的性能明显优于其他轨迹方法。随着时间的增加,ppq -轨迹能够逐渐量化的范围变窄,而剩余量化和产品量化并没有随着时间的增加而改善。在相同比特数的情况下,PPQ-trajectory获得了明显较高的查全率和查准率

2)Trajectory Path Query.
3)Building Time Efficiency