强化学习蘑菇书Easy RL 第四五章
7.20更新,(这两天进度略慢,基本只学了第四章,还没学完,简单记录下吧!)首先我们必须要明确的一个概念,RL有三个组成部分:
- 演员 actor
- 环境 environment
- 奖励函数 reward function
其中,环境和奖励函数是无法控制的,而是开始学习之前给定的,所以,只能做的就是调整演员的policy,使得reward最大。同时,演员的策略决定action。
如果用深度学习来做RL的话,策略π就是一个网络,中间会有一些θ的参数。
智能体看到的就是网络的输入,他也会影响我们训练的结果。输入是智能体看到的画面,通常由像素组成,而输出是可以执行的action,在神经网络里,有几个action,就有几个神经元。
策略梯度
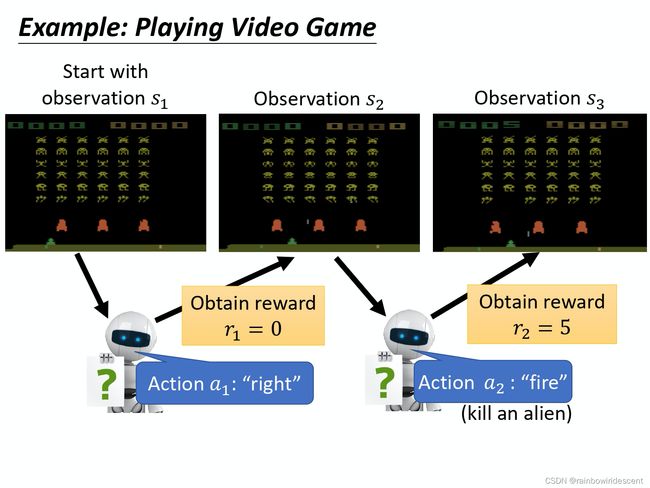
**策略梯度是一个会花很多时间来采样数据的算法,大多数时间都在采样数据。**在一场游戏中,我们把环境输出的s与演员输出的动作a组合起来成为一条轨迹,
可以得到:
Trajectory τ = { s 1 , a 1 , s 2 , a 2 , ⋯ , s t , a t } \text { Trajectory } \tau=\left\{s_{1}, a_{1}, s_{2}, a_{2}, \cdots, s_{t}, a_{t}\right\} Trajectory τ={s1,a1,s2,a2,⋯,st,at}
给定演员的参数θ,可以计算每一个轨迹发生的概率:
p θ ( τ ) = p ( s 1 ) p θ ( a 1 ∣ s 1 ) p ( s 2 ∣ s 1 , a 1 ) p θ ( a 2 ∣ s 2 ) p ( s 3 ∣ s 2 , a 2 ) ⋯ = p ( s 1 ) ∏ t = 1 T p θ ( a t ∣ s t ) p ( s t + 1 ∣ s t , a t ) \begin{aligned} p_{\theta}(\tau) &=p\left(s_{1}\right) p_{\theta}\left(a_{1} \mid s_{1}\right) p\left(s_{2} \mid s_{1}, a_{1}\right) p_{\theta}\left(a_{2} \mid s_{2}\right) p\left(s_{3} \mid s_{2}, a_{2}\right) \cdots \\ &=p\left(s_{1}\right) \prod_{t=1}^{T} p_{\theta}\left(a_{t} \mid s_{t}\right) p\left(s_{t+1} \mid s_{t}, a_{t}\right) \end{aligned} pθ(τ)=p(s1)pθ(a1∣s1)p(s2∣s1,a1)pθ(a2∣s2)p(s3∣s2,a2)⋯=p(s1)t=1∏Tpθ(at∣st)p(st+1∣st,at)
通过上面的式子可以知道的事,可以计算某一个episode里面出现这样的轨迹的概率有多大,每一条轨迹出现的概率取决于环境的动作和智能体的动作。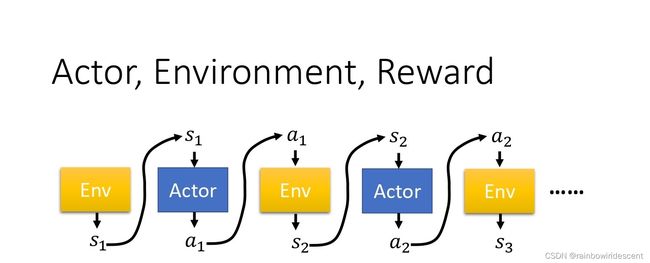
在某一场游戏里面, 某一个回合里面,我们会得到 R。我们要做的事情就是调整演员内部的参数 θ, 使得 R 的值越大越好。 但实际上奖励并不只是一个标量,奖励其实是一个随机变量。R 其实是一个随机变量,因为演员在给定同样的状态会做什么样的行为,这件事情是有随机性的。
这个地方,我们怎么处理呢,我的理解是,轨迹Trajectory的概率是不一样的,这取决于在的某一个episode里面,是不是游戏很快over了,如果over了就说明对应trajectory的p很小,所以每一个轨迹trajectory对应的奖励是不一样的,总的reward必须对于trajectory出现的概率进行加权,也就是期望值。因此,我们得到一个expected reward的总值:
R ˉ θ = ∑ τ R ( τ ) p θ ( τ ) = E τ ∼ p θ ( τ ) [ R ( τ ) ] \bar{R}_{\theta}=\sum_{\tau} R(\tau) p_{\theta}(\tau)=E_{\tau \sim p_{\theta}(\tau)}[R(\tau)] Rˉθ=∑τR(τ)pθ(τ)=Eτ∼pθ(τ)[R(τ)]
在这里我们通常使用的方法就是gradient ascent来max这个expected reward。
说一下什么是梯度上升,通常来说,在中学里,我们学的导数是求一个可以写出表达式函数的极值的方法,但是,有时候有些函数即使能够写出表达式,求得的导数依然不是极值,这种情况我们通常就会使用迭代的方法来解,也就是最优化算法,引入一个α作为步长(MACHINE LEARNING中)。通常来说也可以理解为求偏导。
(这地方不放公式了,如果有疑问也可以百度一下)。
组合一下下面几个公式,我们可以把最终的trajectory求和后写成expected value最终的值:
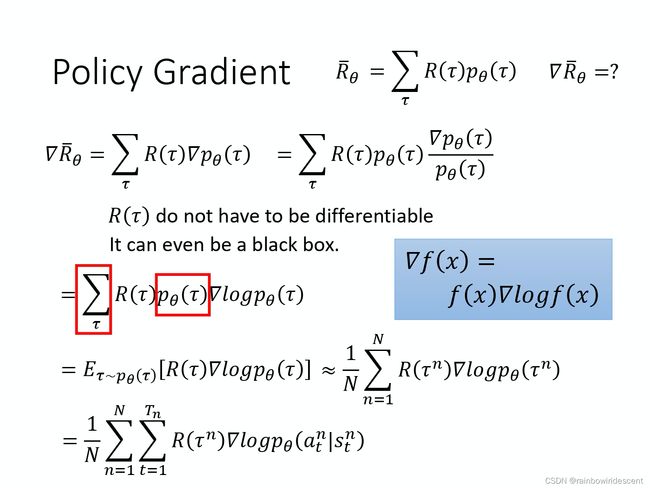
注意一下,上面这张图片的最后一行公式,是怎么推导的呢?
= E τ ∼ p θ ( τ ) [ R ( τ ) ∇ log p θ ( τ ) ] ≈ 1 N ∑ n = 1 N R ( τ n ) ∇ log p θ ( τ n ) = 1 N ∑ n = 1 N ∑ t = 1 T n R ( τ n ) ∇ log p θ ( a t n ∣ s t n ) \begin{aligned} &=E_{\tau \sim p_{\theta}(\tau)}\left[R(\tau) \nabla \log p_{\theta}(\tau)\right] \approx \frac{1}{N} \sum_{n=1}^{N} R\left(\tau^{n}\right) \nabla \log p_{\theta}\left(\tau^{n}\right) \\ &=\frac{1}{N} \sum_{n=1}^{N} \sum_{t=1}^{T_{n}} R\left(\tau^{n}\right) \nabla \log p_{\theta}\left(a_{t}^{n} \mid s_{t}^{n}\right) \end{aligned} =Eτ∼pθ(τ)[R(τ)∇logpθ(τ)]≈N1n=1∑NR(τn)∇logpθ(τn)=N1n=1∑Nt=1∑TnR(τn)∇logpθ(atn∣stn)
这里特别要说明的就是,得到的这个期望值是没法计算的,所以需要用采样的方式采样N个trajectory并计算每一个值,然后再把每一个值加起来,得到梯度。用这个updated gradient去更新agent。
(具体公式推导下面还是列一下。。)
∇ log p θ ( τ ) = ∇ ( log p ( s 1 ) + ∑ t = 1 T log p θ ( a t ∣ s t ) + ∑ t = 1 T log p ( s t + 1 ∣ s t , a t ) ) = ∇ log p ( s 1 ) + ∇ ∑ t = 1 T log p θ ( a t ∣ s t ) + ∇ ∑ t = 1 T log p ( s t + 1 ∣ s t , a t ) = ∇ ∑ t = 1 T log p θ ( a t ∣ s t ) = ∑ t = 1 T ∇ log p θ ( a t ∣ s t ) \begin{aligned} \nabla \log p_{\theta}(\tau) &=\nabla\left(\log p\left(s_{1}\right)+\sum_{t=1}^{T} \log p_{\theta}\left(a_{t} \mid s_{t}\right)+\sum_{t=1}^{T} \log p\left(s_{t+1} \mid s_{t}, a_{t}\right)\right) \\ &=\nabla \log p\left(s_{1}\right)+\nabla \sum_{t=1}^{T} \log p_{\theta}\left(a_{t} \mid s_{t}\right)+\nabla \sum_{t=1}^{T} \log p\left(s_{t+1} \mid s_{t}, a_{t}\right) \\ &=\nabla \sum_{t=1}^{T} \log p_{\theta}\left(a_{t} \mid s_{t}\right) \\ &=\sum_{t=1}^{T} \nabla \log p_{\theta}\left(a_{t} \mid s_{t}\right) \end{aligned} ∇logpθ(τ)=∇(logp(s1)+t=1∑Tlogpθ(at∣st)+t=1∑Tlogp(st+1∣st,at))=∇logp(s1)+∇t=1∑Tlogpθ(at∣st)+∇t=1∑Tlogp(st+1∣st,at)=∇t=1∑Tlogpθ(at∣st)=t=1∑T∇logpθ(at∣st)
Note: 两个p都来自于env,而一个p_θ来自于环境,由于两个p都与环境无关,所以它们对应的log再取梯度都等于0,上式就可以只化成p_θ的梯度。
如何理解下面?在采样到的数据里面,s和a在某个时刻t应该是trajectory的一个状态动作对,我们根据trajectory得到的奖励来增加or降低该轨迹的概率,如果reward正,就增加;reward负,就减少。
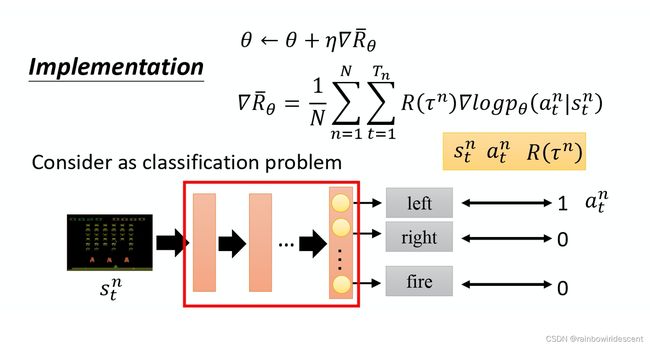
由上图我们也可以知道,为了更新,代入这个总的expected reward的公式里面,我们采样时,要搜集很多的s_t和a_t的动作对。更新参数θ也需要一个对应的learning rate,更新的θ应该是原来的θ加上梯度,而学习率调整可以用Adam方法。(关于Adam再单独出一篇博客。。。。)
你要拿你的 agent,它的参数是θ,去跟环境做互动, 也就是拿你已经训练好的 agent 先去跟环境玩一下,先去跟那个游戏互动一下, 互动完以后,你就会得到一大堆游戏的纪录。同时,和环境的互动有随机性。。。
你就可以把采样到的东西代到这个梯度的式子里面,把梯度算出来。也就是把这边的每一个 s 跟 a 的对拿进来,算一下它的对数概率(log probability)。你计算一下在某一个状态采取某一个动作的对数概率,然后对它取梯度,然后这个梯度前面会乘一个权重,权重就是这场游戏的奖励。 有了这些以后,你就会去更新你的模型。
这就是大概PG的一个流程。。。
注意:一般PG采样的数据,只能用一次,更新参数后,要丢掉原始数据,重新采样,再去更新参数。
说几点注意的实现的细节:
- 类似于一个分类问题,目标函数是最小化交叉熵,我们这里是最大化likelihood
- 强化学习与分类问题不同的地方时姚成一个权重
- 每一次训练数据要进行加权
策略梯度实现技巧
(这部分时间原因,后面会补充上细节)
- 添加基线
- 分配合适的credit
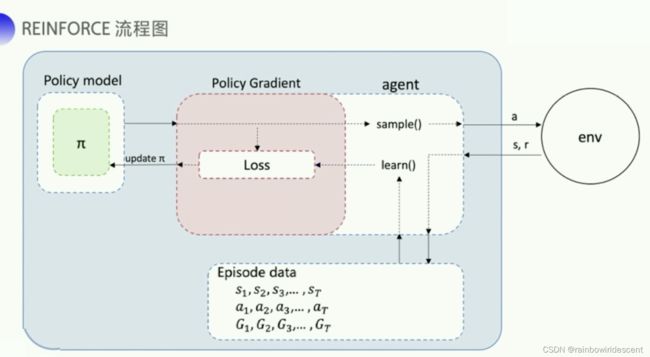
REINFORCE 算法
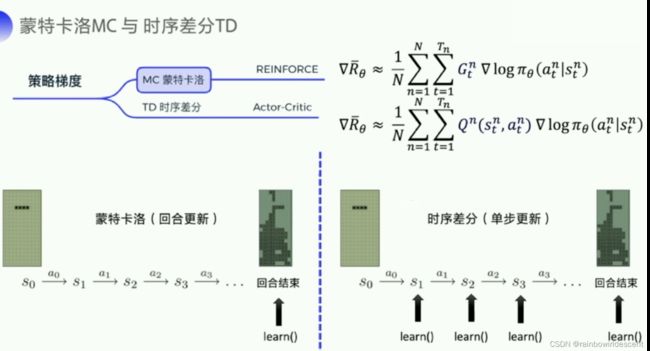
上一章也学习过蒙特卡洛和时序差分的区别,蒙特卡洛一个回合更新一次,时序差分一个步骤更新一次,所以时序差分的更新频率更高,它也使用Q函数来金斯表示未来的总奖励。下图也给出了两种不同的expected reward的式子。
Policy gradient methods can be implemented using the log_prob() method, when the probability density function is differentiable with respect to its parameters. A basic method is the REINFORCE rule:
Δ θ = α r ∂ log p ( a ∣ π θ ( s ) ) ∂ θ \Delta \theta=\alpha r \frac{\partial \log p\left(a \mid \pi^{\theta}(s)\right)}{\partial \theta} Δθ=αr∂θ∂logp(a∣πθ(s))
补一个代码:
probs = policy_network(state)
m = Categorical(probs)
action = m.sample()
next_state, reward = env.step(action)
loss = -m.log_prob(action) * reward
loss.backward()
近端策略优化PPO
很重要的一个概念是importance sampling:
概率密度函数提供的概率分部信息来生成随机变量的取值就是采样。
没学完。。。
明天接着补好了(最近三天一直在忙暑期课程)
害,加油吧。
Reference:
【1】https://datawhalechina.github.io/easy-rl/#/chapter4/chapter4
【2】王琦等,Easy RL蘑菇书,强化学习教程
【3】pytorch官方文档